飞机基础知识一 1.3二维平面飞机运动学模型
目录运动学方程
在二维平面上
将飞机视为一个质点
\[\begin{aligned} & \frac{d x}{d t}=v \cos \psi \\ & \frac{d y}{d t}=v \sin \psi \\ & \frac{d v}{d t}= a \\ & \frac{d \psi}{d t}= \omega \\ \end{aligned} \]状态量为 位置 x ,y , 速率 v 速度与x轴的夹角 \(\theta\)
控制量为 加速度大小 \(a\) 和 角加速度大小 \(\omega\)
程序实现
给定初始状态
二维空间坐标值、飞行速率、与x轴夹角
\[x,y,v,\theta \]state = [x,y,v,theta]
输入 : 控制量 加速度 和 角加速度
\[a, \omega \]control = [a , moega]
代码返回: 下一时间(一个仿真步长)的状态量
完整代码
# -*- coding: utf-8 -*-
"""
@author : zuti
@software : PyCharm
@file : 2_run_func.py
@time : 2023/3/25 14:58
@desc :
"""
import matplotlib.pyplot as plt
import numpy as np
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams.update({'font.size': 12})
# 初始姿态
init_velocity, init_theta = 100., np.pi/2
init_x, init_y = 0., 0. # 初始位置
# todo 两个控制量
a = 5. #单位 m/s2
omega = 1 #单位 rad/s2
state = [init_x, init_y, init_velocity, init_theta]
control = [a,omega]
time = 1 # 秒 总时间
n = 10 # 仿真步数
t = np.linspace(0, time, n) # 仿真步长
def update_position(state, control, time=1, n=100):
"""
:param state: 初始状态
:param control: 控制量
:param time: 仿真时长
:param n: 仿真步数
:return:
"""
t = np.linspace(0, time, n) # 仿真步长
dt = t[1] - t[0]
state_list = np.zeros((n, 4)) # 轨迹长度
state_list[0] = state # 轨迹列表第一个元素为初始状态
x,y,velocity, theta = state_list[0]
for k in range(1, n):
a = control[0]
omega = control[1]
velocity = velocity + a * dt
theta= theta+ omega * dt
dx = velocity * np.cos(theta) * dt
dy = velocity * np.sin(theta) * dt
x = x + dx
state_list[k, 0] = x
y = y + dy
state_list[k, 1] = y
state_list[k, 2] = velocity
state_list[k, 3] = theta
return state_list
#测试运动学方程
state_list = update_position(state,control)
print(f'轨迹 {state_list}')
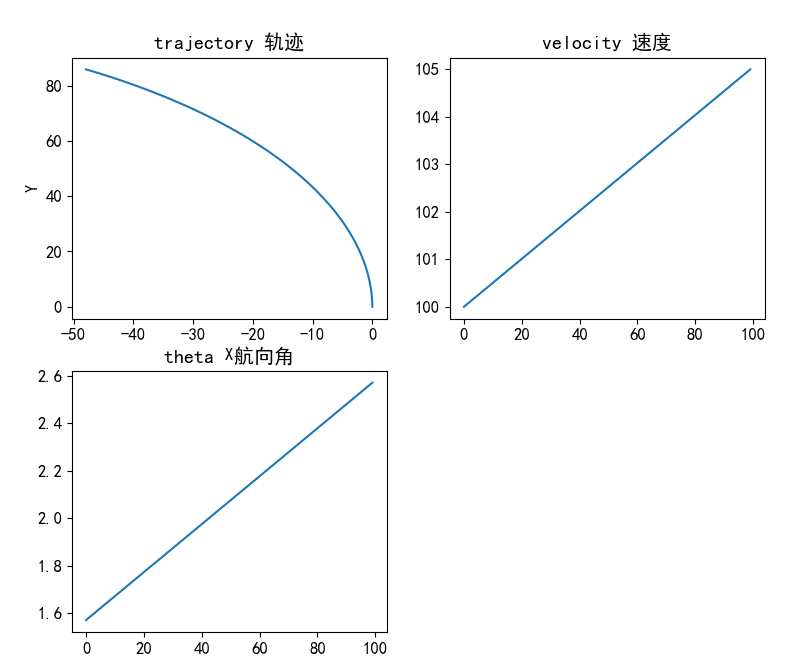
#绘制图像
fig = plt.figure()
ax1 = fig.add_subplot(221)
ax1.plot(state_list[:, 0], state_list[:, 1])
ax1.set_title('trajectory 轨迹')
ax1.set_xlabel('X')
ax1.set_ylabel('Y')
ax2 = fig.add_subplot(222)
ax2.plot(state_list[:,2])
ax2.set_title('velocity 速度')
ax3 = fig.add_subplot(223)
ax3.plot(state_list[:,3])
ax3.set_title('theta 航向角')
#plt.savefig('test.jpg')
plt.show()
效果