原论文:MatrixVT: Efficient Multi-Camera to BEV Transformation for 3D Perception
来自:CVPR2022,旷视科技,Submission-2022.11
针对目前BEV中更有优势的Lift-Splat类方法中关键模块(Vision Transformation),MatrixVT实现了非常优雅的优化,在保持模型性能(甚至略微提高)的同时,能大幅降低计算量和内存消耗。
它可应用于几乎所有Lift-Splat类模型上。
Lift-Splat类方法长期占据nuScenes Camera-only Detection Task的Top-5,如BEVDepth、BEVDet等,足以说明此类方法的优越性。
如果您想进一步了解Lift-Splat类模型的核心Lift-Splat原理,可阅读本文作者另一篇论文解读文章《一文读懂BEV自底向上方法:LSS 和 BEVDepth》。
传送门:
另外,您想了解BEV另一个基于学习的VT方法,例如BEVFormer,可阅读本文作者的论文解读文章《一文读懂BEVFormer论文》和《一文读懂BEVFormer v2: nuScenes camera-only大幅领先的新SOTA》
传送门:
一文读懂BEVFormer v2: nuScenes camera-only大幅领先的新SOTA
Motivation
在BEV模型中,Vision Transformation(VT)是把multi-camera 特征转换为BEV特征的关键模块。
现有的VT方法可被划分为2类:
- 基于视觉几何的方法,根据相机投影和深度估计来进行几何转换,例如LSS、BEVDepth;
- 基于学习的方法,让模型学习BEV中某个grid关注相机图像的哪个/哪些位置,例如BEVFormer。
这两类方法中,前者因为用到了几何约束而表现出了更优越的(检测)性能。Lift-Splat是这类方法的典型代表。虽然Lift-splat-like类方法在性能方面的有效性毋庸置疑,但是它有两个问题:
问题一:Splat操作不是普遍常用操作方法
Splat操作的实现要么依赖于非常低效的cumsum trick,要么依赖于只能在特定设备上运行的定制化操作,这都会增加应用BEV感知的成本。
问题二:Lift过程产生的multi-view image features太大
导致multi-view image features成为了BEV模型的memory瓶颈。
这两个问题,在BEV模型训练和inference时都会存在,严重阻碍了BEV方法在自动驾驶中的应用。
MatrixVT就是致力于解决这两个问题。
方法综述
VT是不同视角feature转换的过程,即把lifted multi-view image features和转换矩阵进行矩阵乘(MatMul)得到BEV features,这里把上述特征转换矩阵(feature transporting matrix)叫做FTM。这样就可以把VT过程归纳成纯数学计算形式,避免需要特定的操作。 FTM本质上是表示lift操作得到的multi-view image features(
)中每个点到BEV 中每个grid的映射关系。
然而,通过FTM实现VT又会导致VT退化,这是因为lifted feature所在3D空间和BEV feature的BEV grids之间映射关系非常稀疏如图2所示,这会导致FTM(
)的尺寸巨大以及计算效率很低。
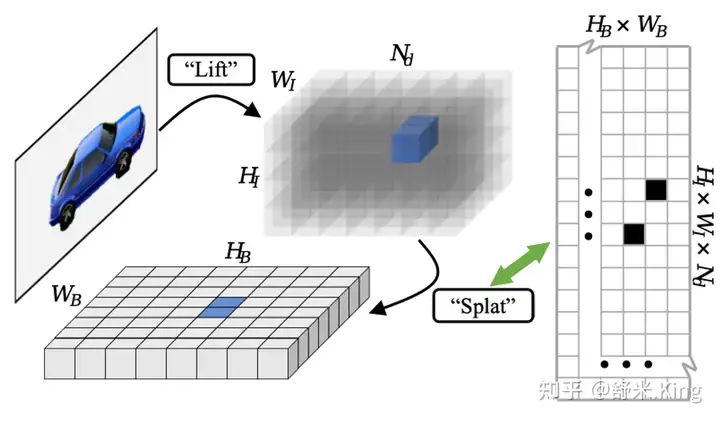 图2. VT可以通过标准操作(如矩阵乘法)来实施,因为在Lift-Splat 类方法的转换过程中,Spalt操作可被表示为二元矩阵(每个BEV grid与哪些Lifted image features有映射关系),这个矩阵很大很稀疏。
图2. VT可以通过标准操作(如矩阵乘法)来实施,因为在Lift-Splat 类方法的转换过程中,Spalt操作可被表示为二元矩阵(每个BEV grid与哪些Lifted image features有映射关系),这个矩阵很大很稀疏。
过去的研究,往往都是在寻找一些定制化的操作,其实是回避了稀疏性的本质问题。MatrixVT论文提出了如下两个方法来解决稀疏性映射问题。
- Prime Extraction
灵感来源于对自动驾驶场景的观察:图像高度方向(即垂直方向)的信息更少,那么就在此维度上把iamge feature压缩。 - 矩阵分解来降低FTM的稀疏性
通过Ring & Ray 分解法把FTM正交地分解为两个独立的矩阵,分别编码自车为中心极坐标的距离和方向。经过Ring & Ray分解,可以把VT重新编排成数学上等效但更高效的公式。
实施这两个方法如图1下半部分所示,可以数百倍地降低VT的内存占用(memory footprint)和计算,使MatrixVR比现有方法都更高效。
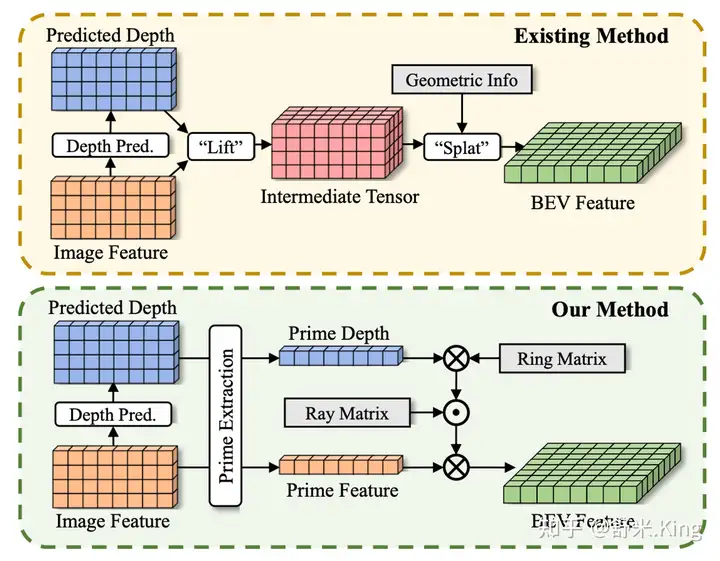 图1. Lift-Splat方法的流程(上),Matrix-VT方法的流程(下)。Matrix方法在VT之前压缩image feature,来减少内存访问量和计算量。Matrix的实现只使用了标准操作,未引入任何特殊操作。
图1. Lift-Splat方法的流程(上),Matrix-VT方法的流程(下)。Matrix方法在VT之前压缩image feature,来减少内存访问量和计算量。Matrix的实现只使用了标准操作,未引入任何特殊操作。
Methods Details
详细讲解MatrixVT创新方法的实现细节。
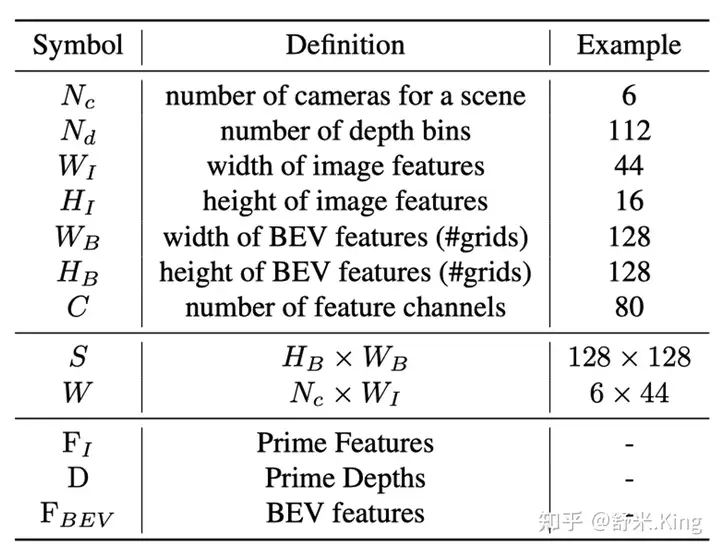 表1. 本文常用符号定义
表1. 本文常用符号定义
Lift-Splat类方法回顾与数学归纳
先对论文中涉及的符号进行定义说明:
- 表示相机数目
- 表示Lift时的深度网格数
- 分别表示image features的高度和宽度
- 分别表示BEV features的高度和宽度
- C表示feature通道数
那么,Lift-Splat过程所涉及输入、输出变量的数学表示如下:
- multi-view image feature可以表示为
-
- Lifted深度估计可以表示为
-
- BEV features可以表示为
Lift-Splat VT的第一步(Lift),通过把 F进行逐像地与D进行外积计算,把F ‘lift’到3D空间,得到中间特征Tensor
计算过程可以被表示为:
这个中间特征Tensor可以被看作
个特征向量,每个特征向量都对应物理空间几何坐标系中的一个点。
Lift-Splat VT的第二步(Splat),以往的方法一般采用Pillar Pooling的操作,根据几何坐标把同属于一个BEV Grid的feature向量加到BEV grid中。
本文作者发现,Splat操作本质上是lifted得到的中间特征到BEV grid的固定映射。因此,可以用一个Feature Transporting Matrix来表示这个映射:
其中
是lifted的中间特征 的矩阵形式, 是BEV特征 的矩阵形式,是映射矩阵。
把Splat归纳为FTM这种数学形式,消除了定制化操作的要求。
但是,3D空间到BEV grid之间的稀疏映射会让FTM非常巨大且稀疏,导致matrix-based VT非常低效。
下面两个技术(Prime Extraction 和 Ring&Ray分解)可以降低FTM的稀疏性,加速VT过程。
面向自动驾驶的Prime Extraction
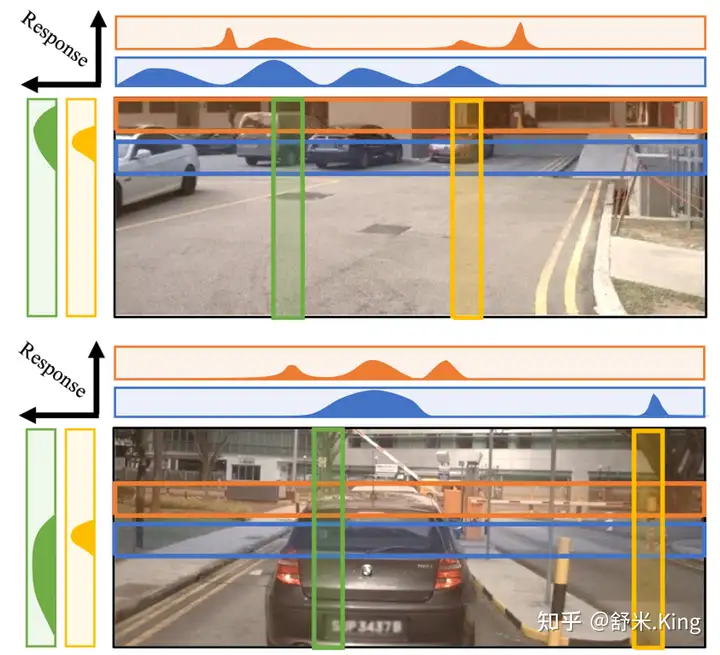 图3. 水平和垂直方向的响应强度分析。对自动驾驶而言,水平宽度方向的响应方差比垂直高度方向更高。
图3. 水平和垂直方向的响应强度分析。对自动驾驶而言,水平宽度方向的响应方差比垂直高度方向更高。
高维中间特征
是稀疏映射和低效VT操作的根本原因。直觉上,可以通过减小尺寸来降低稀疏性,据此作者提出一种面向自动驾驶或类似信息冗余场景的压缩技术——Prime Extraction。
如图3所示,Prime Extraction受针对自动驾驶场景分析的启发:image feature高度方向的响应方差相比于宽度方向更低,这就意味着高度方向的信息量更少。因此作者提出压缩高度方向的image feature。以往的研究工作也曾提出这个方法,但本文首次提出同时在高度方向压缩image feature和相应的深度预测,来加速VT。
Prime Extraction中的Prime就可以直白地理解为响应强度,也可以理解为前景信息/主要信息。
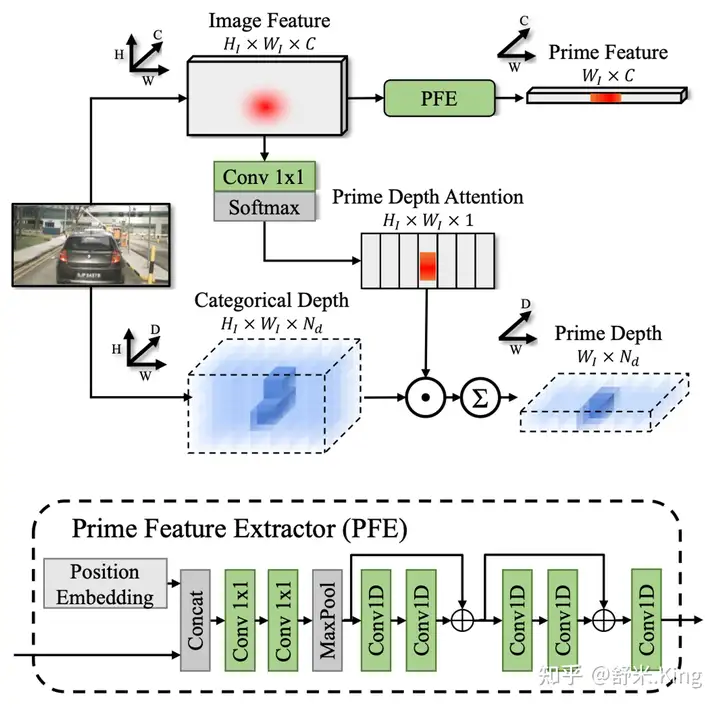 图4. Prime Extraction模块。预估深度在Prime Depth Attention的指导下压缩高度信息;image feature通过PFE进行压缩,包含MaxPooling和一系列卷积层来微调特征。
图4. Prime Extraction模块。预估深度在Prime Depth Attention的指导下压缩高度信息;image feature通过PFE进行压缩,包含MaxPooling和一系列卷积层来微调特征。
如图4所示,分别说明如何生成Prime Depth和Prime Feature
- Prime Depth
首先,以multi-view image features作为输入,用卷积和在H方向的Softmax预测出Prime Depth Attention(PDA)。可以把PDA理解为在H方向的深度Attention,即图3中的垂直方向,哪里的响应强度高,哪里的Softmax结果就大。
然后,对估计深度(Categorical Depth)与PDA进行点积,即每个估计深度点都乘以相应的Prime Depth Attention,得到Intermediate Depth(
最后,再进行H方向的Softmax,得到Prime Depth。Prime Depth中 的一列,就代表W维度某个方向Prime feature(前景特征)的深度估计,实际上是在
- 个深度上的可能性分布。
代码详见:
class DepthReducer(nn.Module):
...- Prime Feature
以multi-view image features作为输入,经过Position Embedding、Column-wise MaxPool(即H方向求最大值),然后再进行1-D卷积,得到Prime Feature。这个过程可以理解为,在Height方向对特征进行信息压缩,得到了响应强烈的主要特征。
代码详见:
class HoriConv(nn.Module):
...通过Prime Extraction的信息压缩,Prime Depth和Prime Feature都被减小了
倍,同步也把FTM缩小 倍变成了,利用它们来生成BEV feature的流程如图5所示。
“Ring & Ray” 分解
可以通过矩阵分解,进一步地把稀疏的FTM减小。
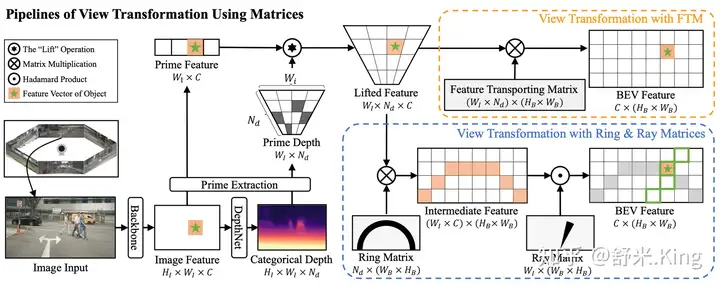 图5. VT流程。从图像提取特征并估计每个pixel深度。特征和预估深度被送到Prime Extraction压缩。用压缩后的Prime Feature和Prime Depth,把1维Prime Feature ‘lift’到2D空间(W和Depth维),得到Lifted Feature。然后通过MatMul操作FTM或分解的Ring&Ray matrices,把Lifted Feature转换成BEV feature。
图5. VT流程。从图像提取特征并估计每个pixel深度。特征和预估深度被送到Prime Extraction压缩。用压缩后的Prime Feature和Prime Depth,把1维Prime Feature ‘lift’到2D空间(W和Depth维),得到Lifted Feature。然后通过MatMul操作FTM或分解的Ring&Ray matrices,把Lifted Feature转换成BEV feature。
不失一般性地把
设为1, 就变成了。在极坐标系下:
- 维度可看作方向,因为image feature中每一列相当于一个特定方向的信息。
- 维度可看作距离,因为这个维度就表示深度depth。
换言之,某个特定BEV grid所对应的image feature可通过方向和距离来定位。作者提出把
正交分解为两个矩阵,分别编码方向和距离信息。具体来说就是:
- 用Ray矩阵
- 来编码深度信息;
- 用Ring矩阵
- 来编码距离信息。
上述Ring&Ray分解可以有效地减少静态参数。预定义的参数量从
减少为,一般会减少30~50倍。
在VT过程中如何使用Ring和Ray矩阵呢?
首先,对Prime Feature和Prime Depth进行与Lift-Splat中一样的逐元素外积计算,得到Lifted feature
:

然后,如图5所示,代替黄框中用
直接转换成BEV feature,作者调换了 各个维度的顺序,转换成矩阵 ,然后让Ring矩阵与 进行矩阵相乘得到中间特征(intermediate feature)。然后在把中间特征与Ray矩阵进行哈达玛积,进行编码,然后在维度相加得到BEV feature,计算过程如下公式:
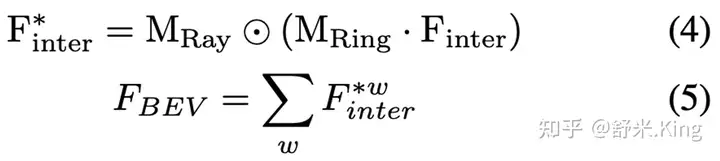
其中,
。
Ring&Ray分解后,按公式3~5逐个计算,没有把VT过程的FLOPs降低,为什么呢,如何解决?
主要是因为在公式3中的Intermediate Feature中就过早地引了feature channel这个维度,同时它也比较大,那么进行4、5计算时都是带着这个feature channel维度来计算的。
为了解决这个问题,作者把上述VT过程涉及的3~5这3个公示联立,变换成数学上相等的形式:

这里
表示Prime Feature,变换后把引入Feature channel的放在了括号的最外面,即最后一步再计算。那么前两步的矩阵乘积和内积运算就不包含feature channel了。
这样,在常见设置的情况下
,Ring&Ray分解可降低计算量46倍,同时节省96%的内存占用。
VT计算数学变换的说明(Appendix1.2)
论文Appendix1.2给出了公式6的变换证明过程。为了简化,忽略了feature channel的C,这样
就可以写为。说明一下,这里以及后续的证明公式中,把变量的size标记在了右上角。

S表示BEV的尺寸,例如128x128的BEV,那么S=128x128=16384;
W表示image feature的宽度;
表示深度估计中的离散化深度数目;
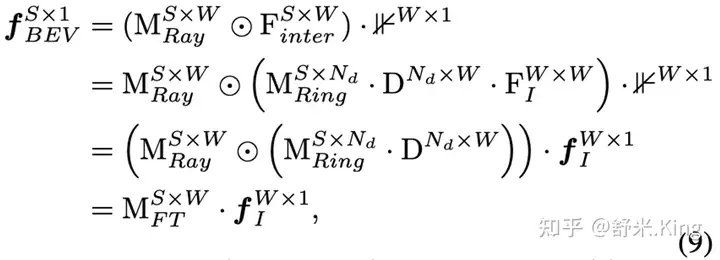
表示Prime Feature 的对角矩阵,这里忽略了feature channel C。公式就第二行中,用对角阵与
相乘,相当于实现了Lift操作的外积计算。
如何生成Ring & Ray 矩阵?
Ring & Ray的生成过程依赖相机的内、外参,它们决定了lifted features与BEV grids的空间几何关系。Ring & Ray矩阵只需要生成一次,这是因为相机位置一般固定不变。
为了简化描述生成Ring & Ray矩阵的算法,这里没有以相机内、外参作为输入,而是采用了lifted Prime Feature的几何位置(2D坐标
),以及BEV Grids (2D grids,坐标为)。具体算法如下伪代码所示:
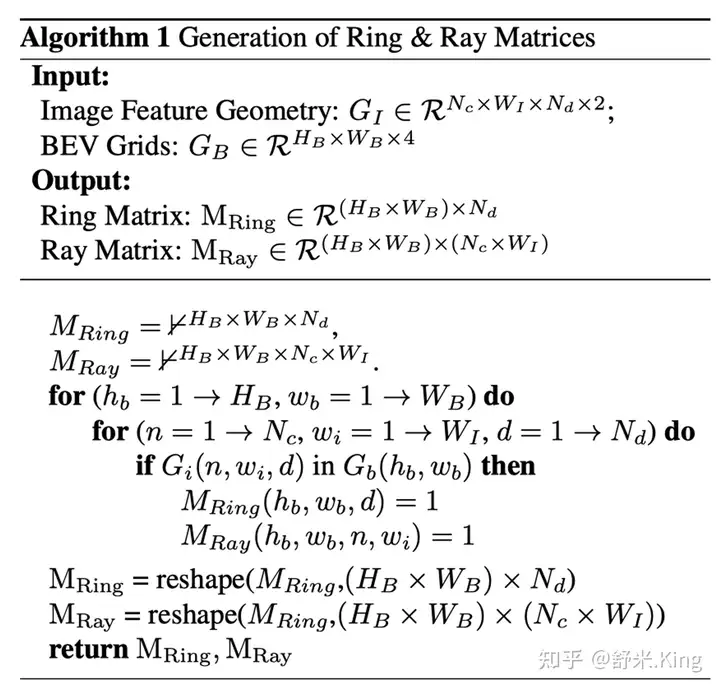
大体思路就是:
把Ring & Ray矩阵初始化为0, 遍历
的每个方向和的每个深度,如果Lifted Feature落在某个grid,就把这个grid所对应的Ring & Ray矩阵的元素置为1。
Experiment
MatrixVT对Lift-Splat类方法中VT部分进行相对独立地优化,因此它可用于改造大多数Lift-Splat类方法,例如论文中MatrixVT的实验都是基于BEVDepth工程进行MatrixVT优化改造。
- 检测性能方面
相比于BEVDepth,MatrixVT的在3D目标检测任务和分割任务的检测性能方面,基本保持不变,甚至某些指标略有提高。
- 计算速度和内存占用方面
MatrixVT在保持模型性能不降的前提下,对提高VT过程的计算速度和减少内存占用量方面,优势非常明显。
另外,在实验中作者还讨论了Prime Extraction的有效性,并可视化地分析了Prime Depth的有效性。
相关数学知识回顾
矩阵各种乘法及其代码实现
矩阵乘积(叉乘)
- 定义
A是m * n矩阵,B是n x p矩阵,C = AB,结果C是m x p的矩阵 - PyTorch用法
a = torch.Tensor([[1,2], [3,4]])
b = torch.Tensor([[5,6], [7,8]])
matrix_product = torch.mm(a, b)
print('matrix_product:', matrix_product)
matrix_product: tensor([[19., 22.],
[43., 50.]])Hadamard 积(点乘、内积)
- 定义
A是m x n矩阵,B也是m x n矩阵,C = A ⊙ B,结果C也是m x n的矩阵
即对形状相同矩阵中的元素进行逐个对应相乘,产生与输入相同维度的输出矩阵。在数学中,Hadamard乘积(也称为 Schur乘积或逐元素乘积)是一种二元运算。

- PyTorch用法
a = torch.Tensor([[1,2], [3,4]])
b = torch.Tensor([[5,6], [7,8]])
hadamard_product = a * b
# hadamard_product = torch.dot(a, b)
print('hadamard_product:', hadamard_product)
hadamard_product: tensor([[ 5., 12.],
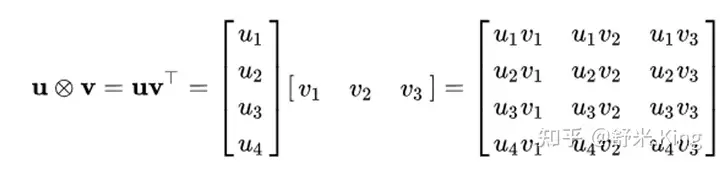
[21., 32.]])Kronecker(外积)
- 定义
Kronecker 积是两个任意大小矩阵间的运算,表示为 A ⊗ B 。如果 A 是一个 m × n 的矩阵,而 B 是一个 p × q 的矩阵,克罗内克积则是一个 m p × n q 的分块矩阵。克罗内克积也称为直积或张量积。
即A中任一元素与B中的每个元素相乘,得到p x q的矩阵,然后m x n个A的元素都做相同的操作,得到m x n个p x q的矩阵。
- NumPy用法
import numpy as np
a = np.eye(3)
b = np.ones((3,2,3))
c = np.kron(a,b)