基于磁场定向控制(Field-Oriented Control,FOC),也称为矢量控制,是一种用于交流电动机(特别是异步电动机和永磁同步电动机)的高性能控制技术。FOC的核心思想是将电动机的定子电流分解为两个正交分量:产生磁通的电流分量(称为励磁电流或id)和产生转矩的电流分量(称为转矩电流或iq)。通过独立控制这两个分量,可以实现电动机的高效和精确控制。
以下是基于磁场定向控制的基本原理和步骤:
基本原理
-
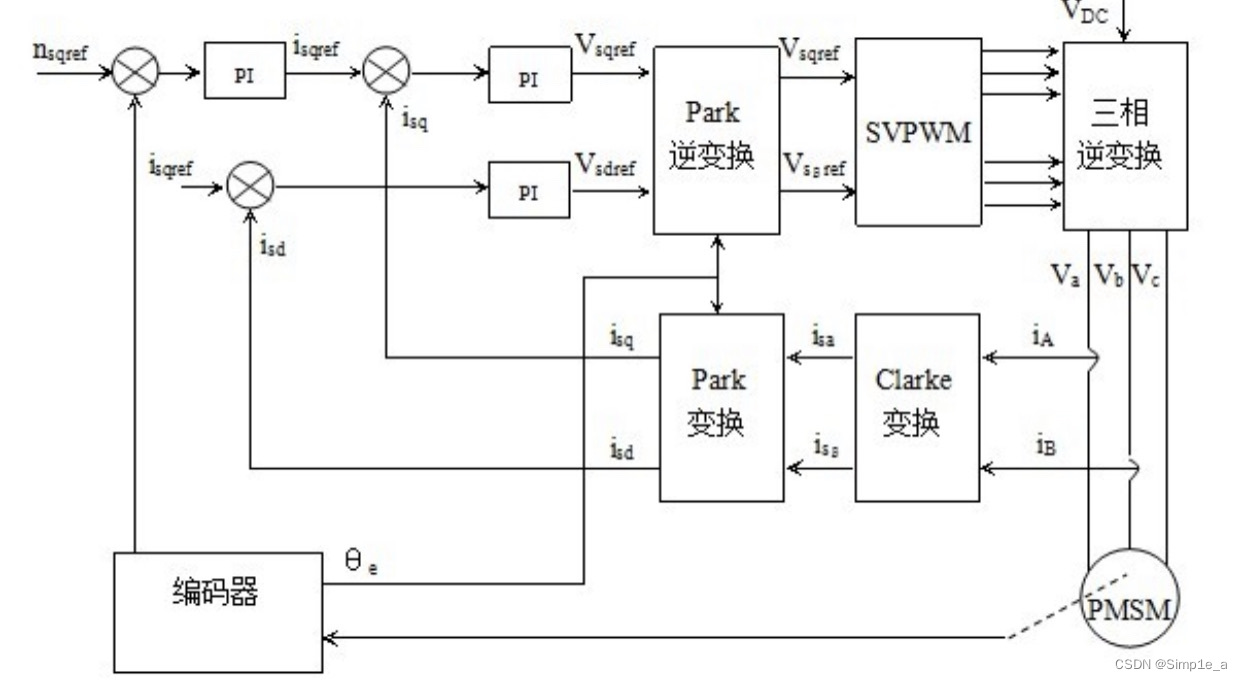
坐标变换:FOC使用坐标变换将三相定子电流转换为旋转坐标系中的两个直流分量。最常用的变换是Clarke变换和Park变换。
- Clarke变换:将三相静止坐标系(abc)转换为两相静止坐标系(αβ)。
- Park变换:将两相静止坐标系(αβ)转换为旋转坐标系(dq),其中d轴与电动机的磁场对齐,q轴超前d轴90度。
-
电流控制:在dq坐标系中,通过PI(比例积分)控制器分别控制励磁电流(id)和转矩电流(iq)。
-
磁场和转矩的独立控制:
- 励磁电流(id):控制电动机的磁通大小。对于永磁同步电动机,通常设定id为零以实现最大的效率。
- 转矩电流(iq):控制电动机的转矩。iq与电动机的转速和负载有关。
-
反变换:使用逆Park变换和逆Clarke变换将dq坐标系中的电流分量转换回三相静止坐标系,以生成PWM信号。
控制步骤
-
电流采样:测量电动机的定子电流。
-
坐标变换:使用Clarke和Park变换将三相电流转换为dq坐标系中的id和iq。
-
电流控制:
- 计算id和iq的参考值。
- 将实际测量的id和iq与参考值进行比较,并通过PI控制器调整电压指令。
-
电压指令生成:根据PI控制器的输出生成dq坐标系中的电压指令。
-
反变换:使用逆Park变换和逆Clarke变换将电压指令转换回三相静止坐标系。
-
PWM生成:根据转换后的电压指令生成PWM信号,以控制逆变器开关。
-
逆变器控制:将PWM信号应用于逆变器,以驱动电动机。
FOC的优点
- 高效率:通过优化电流分量,可以实现更高的电动机效率。
- 精确控制:可以实现精确的转速和转矩控制。
- 低转矩纹波:由于电流的精细控制,转矩纹波较小。
- 宽速度范围:适用于从低速到高速的广泛运行范围。
FOC的缺点
- 复杂性:需要复杂的坐标变换和多个PI控制器,增加了控制算法的复杂性。
- 对参数敏感性:电动机参数的变化可能会影响控制性能,因此需要精确的参数辨识。