强化学习:基于蒙特卡洛树和策略价值网络的深度强化学习五子棋(含码源)
-
特点
- 自我对弈
- 详细注释
- 流程简单
-
代码结构
- net:策略价值网络实现
- mcts:蒙特卡洛树实现
- server:前端界面代码
- legacy:废弃代码
- docs:其他文件
- utils:工具代码
- network.py:移植过来的网络结构代码
- model_5400.pkl:移植过来的网络训练权重
- train_agent.py:训练脚本
- web_server.py:对弈服务脚本
- web_server_demo.py:对弈服务脚本(移植网络)
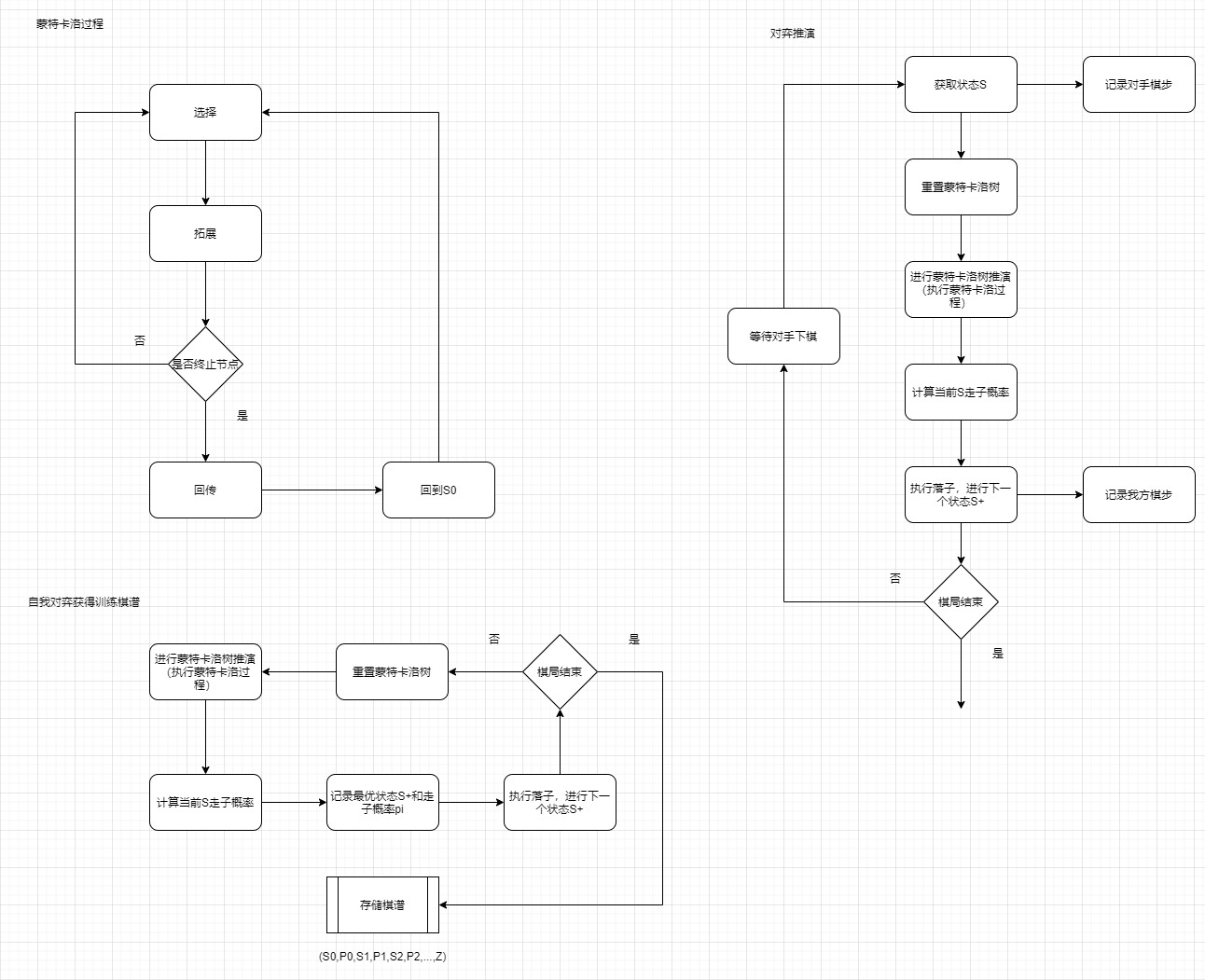
1.1 流程
1.2策略价值网络
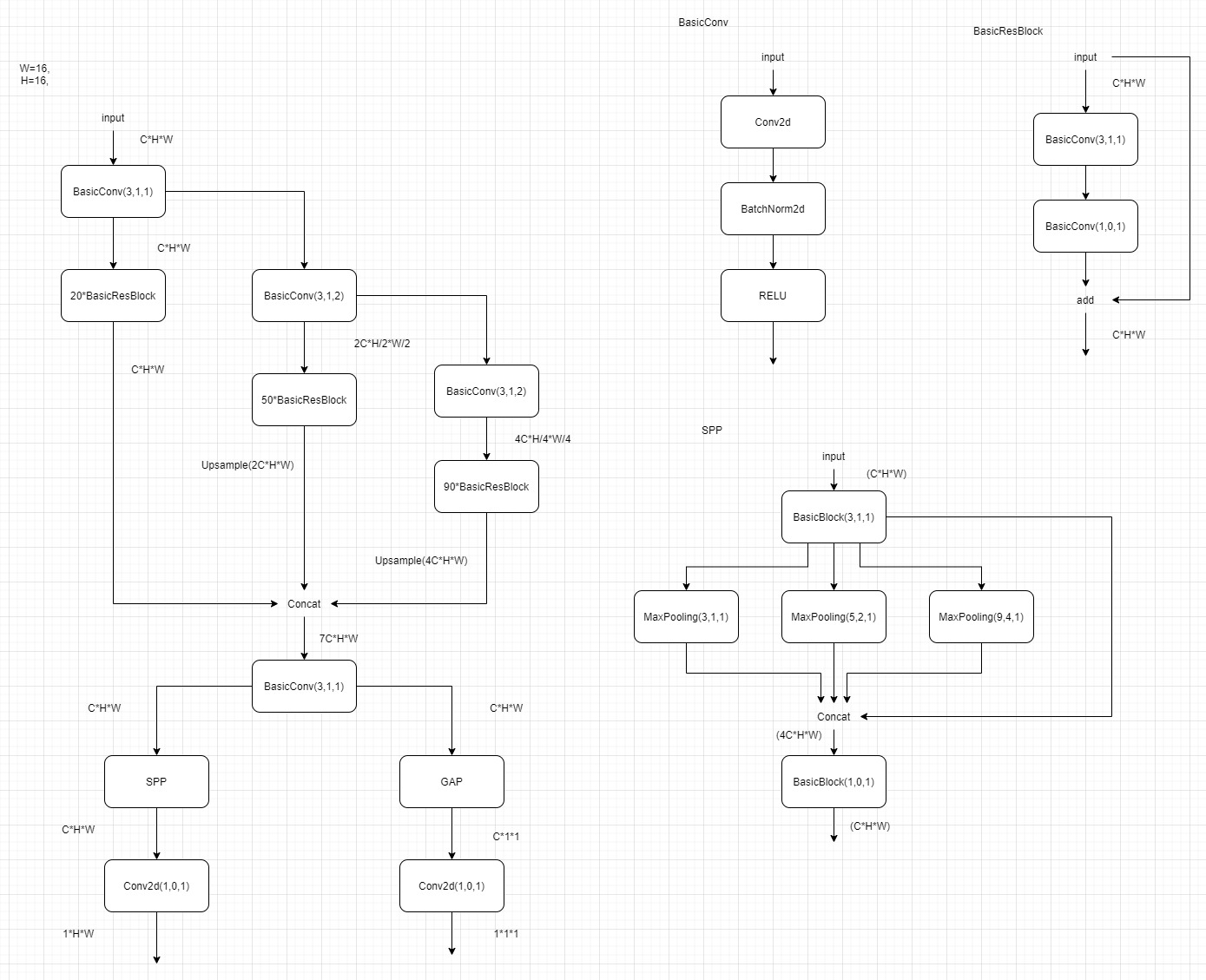
采用了类似ResNet的结构,加入了SPP模块。
(目前,由于训练太耗时间了,连续跑了三个多星期,才跑了2000多个自我对弈的棋谱,经过实验,这个策略网络的表现,目前还是不行,可能育有还没有训练充分)
同时移植了另一个开源的策略网络以及其训练权重(network.py、model_5400.pkl),用于进行仿真演示效果。
1.3 训练
根据注释调整train_agent.py文件,并运行该脚本
部分代码展示:
if __name__ == '__main__':
conf = LinXiaoNetConfig()
conf.set_cuda(True)
conf.set_input_shape(8, 8)
conf.set_train_info(5, 16, 1e-2)
conf.set_checkpoint_config(5, 'checkpoints/v2train')
conf.set_num_worker(0)
conf.set_log('log/v2train.log')
# conf.set_pretrained_path('checkpoints/v2m4000/epoch_15')
init_logger(conf.log_file)
logger()(conf)
device = 'cuda' if conf.use_cuda else 'cpu'
# 创建策略网络
model = LinXiaoNet(3)
model.to(device)
loss_func = AlphaLoss()
loss_func.to(device)
optimizer = torch.optim.SGD(model.parameters(), conf.init_lr, 0.9, weight_decay=5e-4)
lr_schedule = torch.optim.lr_scheduler.StepLR(optimizer, 1, 0.95)
# initial config tree
tree = MonteTree(model, device, chess_size=conf.input_shape[0], simulate_count=500)
data_cache = TrainDataCache(num_worker=conf.num_worker)
ep_num = 0
chess_num = 0
# config train interval
train_every_chess = 18
# 加载检查点
if conf.pretrain_path is not None:
model_data, optimizer_data, lr_schedule_data, data_cache, ep_num, chess_num = load_checkpoint(conf.pretrain_path)
model.load_state_dict(model_data)
optimizer.load_state_dict(optimizer_data)
lr_schedule.load_state_dict(lr_schedule_data)
logger()('successfully load pretrained : {}'.format(conf.pretrain_path))
while True:
logger()(f'self chess game no.{chess_num+1} start.')
# 进行一次自我对弈,获取对弈记录
chess_record = tree.self_game()
logger()(f'self chess game no.{chess_num+1} end.')
# 根据对弈记录生成训练数据
train_data = generate_train_data(tree.chess_size, chess_record)
# 将训练数据存入缓存
for i in range(len(train_data)):
data_cache.push(train_data[i])
if chess_num % train_every_chess == 0:
logger()(f'train start.')
loader = data_cache.get_loader(conf.batch_size)
model.train()
for _ in range(conf.epoch_num):
loss_record = []
for bat_state, bat_dist, bat_winner in loader:
bat_state, bat_dist, bat_winner = bat_state.to(device), bat_dist.to(device), bat_winner.to(device)
optimizer.zero_grad()
prob, value = model(bat_state)
loss = loss_func(prob, value, bat_dist, bat_winner)
loss.backward()
optimizer.step()
loss_record.append(loss.item())
logger()(f'train epoch {ep_num} loss: {sum(loss_record) / float(len(loss_record))}')
ep_num += 1
if ep_num % conf.checkpoint_save_every_num == 0:
save_checkpoint(
os.path.join(conf.checkpoint_save_dir, f'epoch_{ep_num}'),
ep_num, chess_num, model.state_dict(), optimizer.state_dict(), lr_schedule.state_dict(), data_cache
)
lr_schedule.step()
logger()(f'train end.')
chess_num += 1
save_chess_record(
os.path.join(conf.checkpoint_save_dir, f'chess_record_{chess_num}.pkl'),
chess_record
)
# break
pass
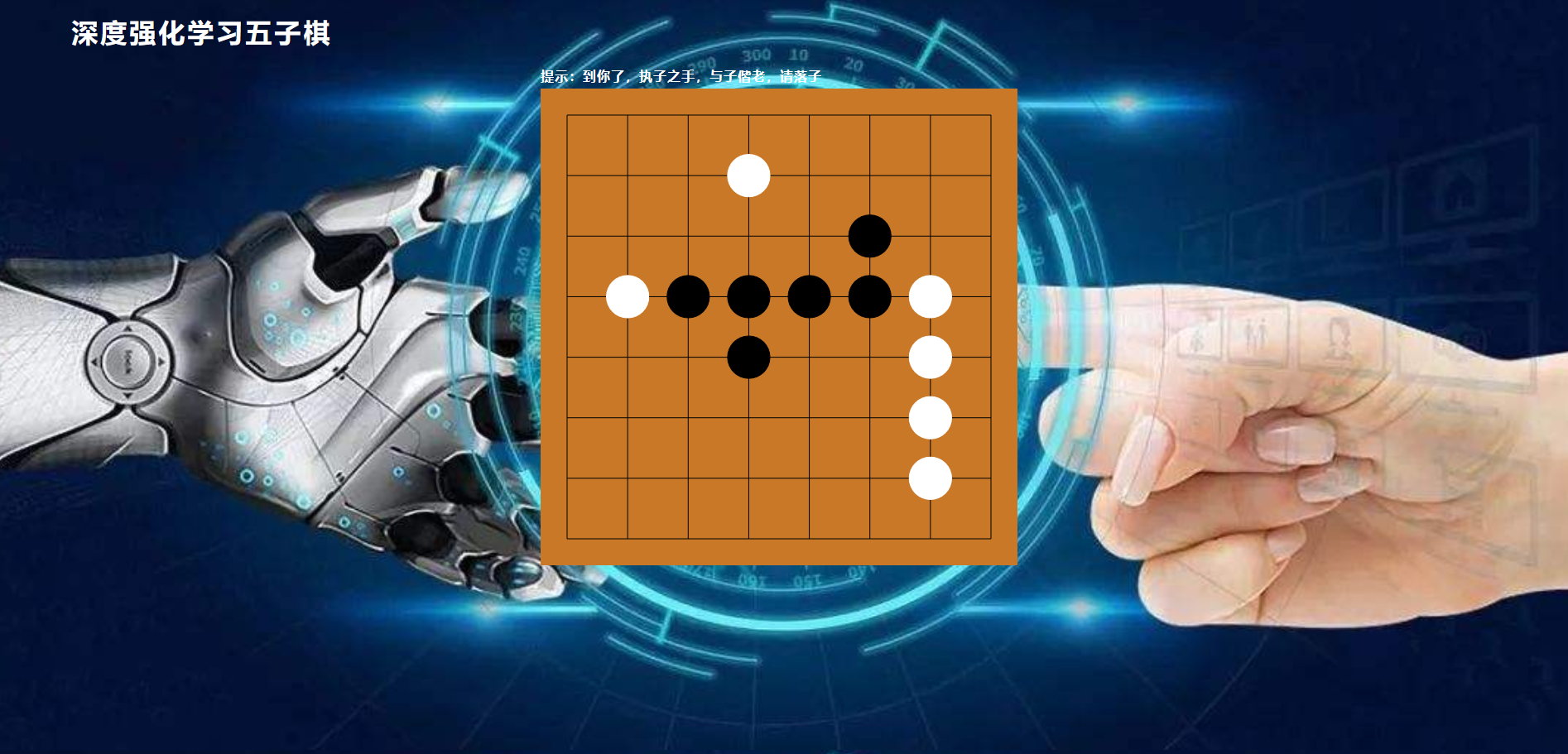
1.4 仿真实验
根据注释调整web_server.py文件,加载所用的预训练权重,并运行该脚本
浏览器打开网址:http://127.0.0.1:8080/ 进行对弈
部分代码展示
# 用户查询机器落子状态
@app.route('/state/get/<state_id>', methods=['GET'])
def get_state(state_id):
global state_result
state_id = int(state_id)
state = 0
chess_state = None
if state_id in state_result.keys() and state_result[state_id] is not None:
state = 1
chess_state = state_result[state_id]
state_result[state_id] = None
ret = {
'code': 0,
'msg': 'OK',
'data': {
'state': state,
'chess_state': chess_state
}
}
return jsonify(ret)
# 游戏开始,为这场游戏创建蒙特卡洛树
@app.route('/game/start', methods=['POST'])
def game_start():
global trees
global model, device, chess_size, simulate_count
tree_id = random.randint(1000, 100000)
trees[tree_id] = MonteTree(model, device, chess_size=chess_size, simulate_count=simulate_count)
ret = {
'code': 0,
'msg': 'OK',
'data': {
'tree_id': tree_id
}
}
return jsonify(ret)
# 游戏结束,销毁蒙特卡洛树
@app.route('/game/end/<tree_id>', methods=['POST'])
def game_end(tree_id):
global trees
tree_id = int(tree_id)
trees[tree_id] = None
ret = {
'code': 0,
'msg': 'OK',
'data': {}
}
return ret
if __name__ == '__main__':
app.run(
'0.0.0.0',
8080
)
1.5 仿真实验(移植网络)
运行脚本:python web_server_demo.py
浏览器打开网址:http://127.0.0.1:8080/ 进行对弈
- 参考文档
码源链接见文末
更多优质内容请关注公号&知乎:汀丶人工智能;会提供一些相关的资源和优质文章,免费获取阅读。
