@
目录一、图的基本概念
1.1 图的定义
图 G 由顶点集 \(V\) 边集 \(E\) 组成,记为 \(G=(V, E)\) , 其中 \(V(G)\) 表示图 \(G\) 中顶点的有限非空集;
\(E(G)\) 表示图 \(G\) 中顶点之间的关系 (边) 集合。 若 \(V= {V_1 , V_2,…, V_n}\),则用 \(|V|\) 叫表示图中顶点的个数,也称图 \(G\) 的阶, \(E = {(u,v) \ | \ u∈V,v∈V}\),用 \(|E|\) 表示图 \(G\) 中边的条数。
注意:图的顶点集 \(V\) 一定为非空,而图的边集 \(E\) 可能为空
1.2 基本术语
1.2.1 有向图
图中的边集是由方向的,例如有一个从点 \(A\) 到 \(B\) 的有向边,那么我们从 \(A\) 点可以到达 \(B\) 点,而不能从 \(B\) 点到达 \(A\) 点,这样就是一个有向边,在这条边中点 \(A\) 被称为 弧尾 ,而点 \(B\) 被称为 弧头 ,我们通常用这样的符号来记录这条边:<A,B>
1.2.2 无向图
很显然没有方向的边和顶点集构成的图就为无向图,按照上面的情况,在无向图中顶点之间是互相连通的,即若有一个点 \(A\) 到点 \(B\) 的边,从 \(B\) 出发也是能到达 \(A\) 点的,我们通常使用这样的符号来记录这条边:(A,B)
1.2.3 简单图
一个图 \(G\) 若满足:
- ①不存在重复边
- ②不存在顶点到自身的边,则称图 \(G\) 为简单图
1.2.4 多重图
若图 \(G\) 中某两个结点之间的边数多于一条,又允许顶点通过同一条边也和自己关联,则 \(G\) 为多重图。多重图的定义和简单图是相对的
1.2.5 完全图
- 在一个顶点数量为 \(n\) 的无向图中,若边的数量为 \(\frac{(n-1)\times n}{2}\) ,则该无向图为完全图
- 在一个顶点数量为 \(n\) 的有向图中,若边的数量为 \((n-1)\times n\) ,则该有向图为完全图
1.2.6 子图
设有两个图 \(G = (V,E)\) 和 \(G'=(V',E')\), 若 \(V'\)是 \(V\) 的子集,且 \(E'\)是 \(E\) 的子集,则称 \(G'\) 是 \(G\) 的子图,若满足 \(V' = V\) 且 \(E' \subset E\) 那么子图 \(G'\) 为 \(G\) 的生成子图
注意:并非 \(V\) 和 \(E\) 的任何子集都能构成 \(G\) 的子图,因为这样的子集可能不是图, 即 \(E\) 的子集中的某些边关联的顶点可能不在这个 \(V\) 的子集中
1.2.7 连通、连通分量、连通图
关于连通方面的定义都是基于无向图的
- 连通:在无向图中若从顶点 \(u\) 到顶点 \(v\) 有路径存在,那么称 \(u\) 和 \(v\) 是连通的
- 连通图:若无向图中任意两点是连通的,那么这个无向图就称为连通图,否则称为非连通图
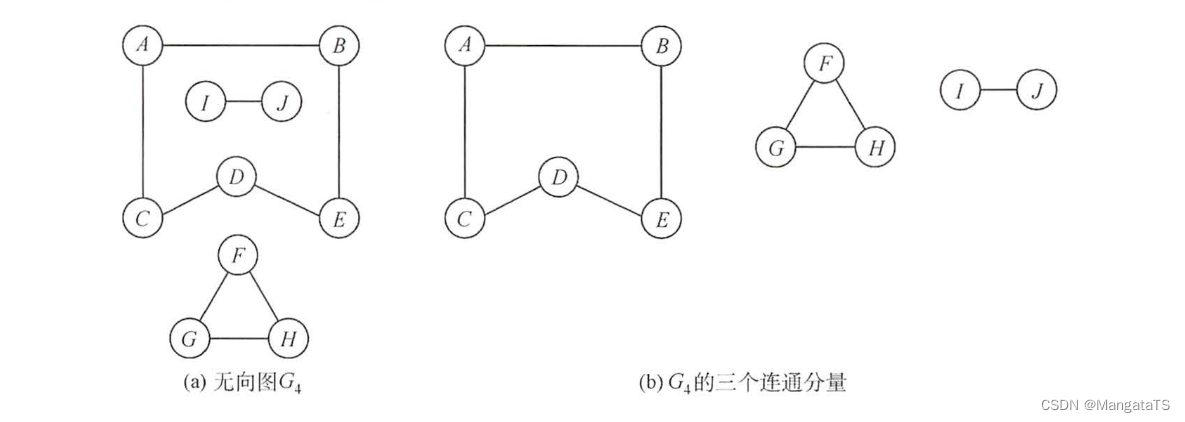
- 连通分量:对于一个连通图而言,其连通分量只有一个就是其本身,而对于非连通图而言,连通分量有多个,其每一个子图(或者称为极大联通子图)都是一个连通分量
很显然一个 \(n\) 个点的连通图最少有 \(n-1\) 条边(即后面提到的生成树),最多有 \(\frac{(n-1)\times n}{2}\) 个边
这里再补一下 极小连通子图 的定义:一个顶点为 \(n\) 的子图的边数为 \(n-1\) (其实后面也能知道这其实是生成树的定义) ,就称其为极小连通子图,很显然这样的子图也是一个极大连通子图,因为它是一个连通分量。
例如,对于下面的这个非连通图,其连通分量有三个:
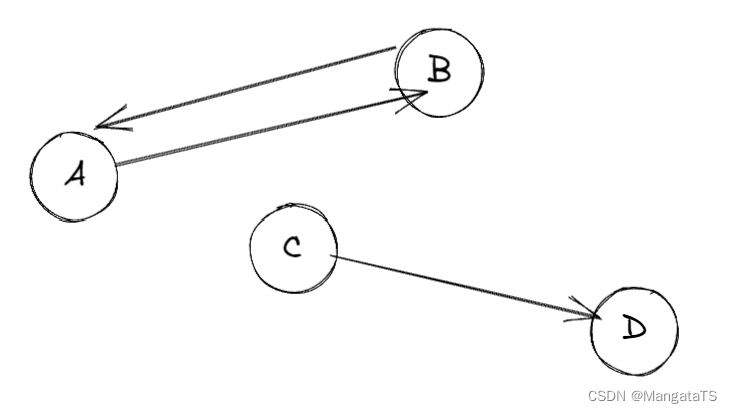
1.2.8 强连通
关于强连通方面的定义都是基于有向图的
- 强连通:在有向图中,若从顶点 \(v\) 到顶点 \(w\) 和从顶点 \(w\) 到顶点 \(v\) 之间都有路径 ,则称这两个顶点为强连通的
- 强连通图:若有向图中任意两点之间都是强连通的,那么称这个有向图为强连通图,否则称为非强连通图
- 强连通分量:对于一个强连通图而言,其强连通分量就是本身,而对于一个非强连通图而言,其极大强连通子图就为该非强连通分量(在子图中任意两点仍满足强连通)
例如,对于如下的非强连通图,其中点 \(A\) 和 \(B\) 构成的子图就为极大联通子图,即强连通分量,而点 \(C\) 和 \(D\) 构成的子图则不是强连通分量
1.2.9 生成树、森林
生成树、森林一般是基于无向图的
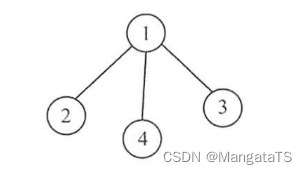
连通图的生成树是包含图中全部顶点的一个极小连通子图,即一个 \(n\) 个点的连通图中有 \(n-1\) 条边
很显然这样的连通图,如果减去一条边就会形成非连通图,而若是加上一条边,则会形成回路
例如,下图中的连通图就为一个生成树:
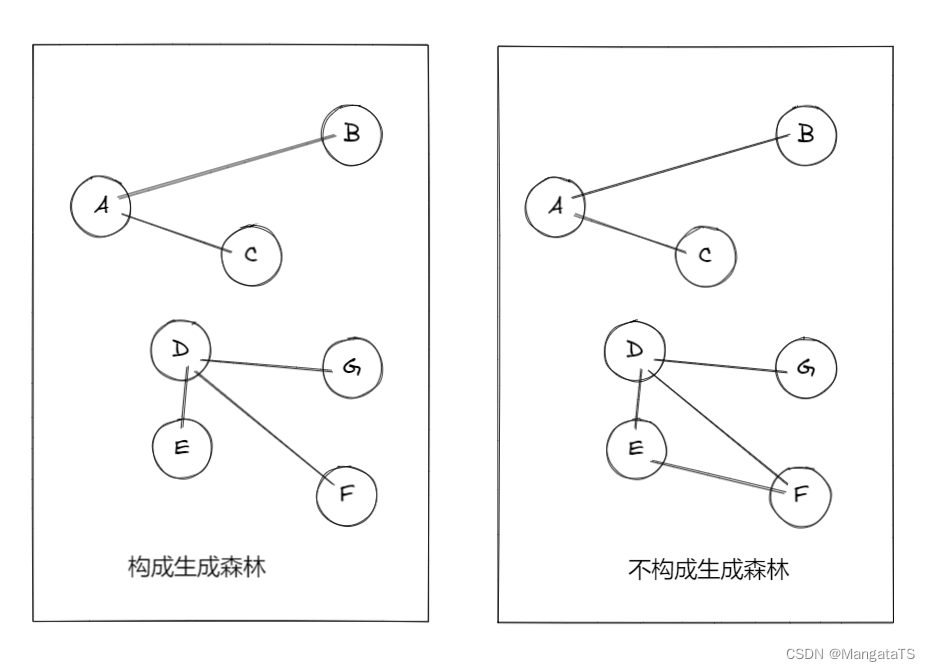
而生成森林其实就是多个连通子图都是极小连通子图(生成树),那么就称这个森林为生成森林,例如下图中左边森林为生成森林,而右边的森林不是连通森林:
1.2.10 顶点的度
- 无向图:对于无向图而言,顶点的度就是和该顶点相连接的边数
- 有向图:对于有向图而言,指向该顶点的边数称为入度,而从该顶点指出的边数称为出度
- 无向图的全部顶点的度之和等于两倍的边数
- 有向图的全部顶点的出度等于全部顶点的入度等于边数
1.2.11 边权和网
在一个图中,每条边都可以标上具有某种含义的数值,该数值称为该边的权值。 这种边上带有权值的图称为带权图,也称网 。
网中通常分为, \(AOV\) 网和 \(AOE\) 网
- \(AOV\) 网:没有权值,或者权值都相同,主要是在于点与点之间的先后关系
- \(AOE\) 网:有权值,每一个点称为事件,而边称为活动
1.2.12 稠密、稀疏图
- 稠密图:点数较大,而边数较少的图称为稀疏图
- 稠密图:点数较小,而边数较多的图称为稠密图
一般来说当图 \(G\) 满足 \(|E| < |V|log_2|V|\) 的时候,可以将图G定义为稀疏图,反之则为稠密图
1.2.13 路径、路径长度、回路
- 路径:顶点 \(V_u\) 到顶点 \(V_v\) 的顶点序列 \(V_p,V_{i1},V_{i_2},……,V_u\) 称为这两点的路径
- 路径长度:路径上边的数目称为路径长度
- 回路:起点和终点相同的非 \(0\) 路径长度的路径称为回路
1.2.14 简单路径、简单回路
- 简单路径:在路径的顶点序列中顶点不重复的路径称为简单路径
- 简单回路:除了起点和终点相同外其余顶点不重复的回路称为简单回路
1.2.15 距离
从顶点 \(u\) 出发到顶点 \(v\) 的最短路径若存在,则此路径的长度称为从 \(u\) 到 \(v\) 的距离 。 若从 \(u\) 到 \(ν\) 根本不存在路径,则记该距离为无穷 \((∞)\)
1.2.16 有向树
一个顶点的入度为 \(0\) 、其余顶点的入度均为 \(1\) 的有向图,称为有向树
二、图的存储结构
2.1 邻接矩阵
通过一个一维矩阵 \(V\) 存储顶点信息,然后再通过一个二维矩阵 \(A\) 存储边的信息
对于无权图 \(A[i][j]\) 的含义如下:
\[A[i][j] = \begin{cases} 1 ,若(V_i,V_j)或者 <V_i,V_j>是E(G)中的边 \\ 0 ,若(V_i,V_j)或者 <V_i,V_j>不是E(G)中的边\\ \end{cases} \]对于有权图 \(A[i][j]\) 的含义如下:
\[A[i][j] = \begin{cases} V[i][j] ,若(V_i,V_j)或者 <V_i,V_j>是E(G)中的边 \\ 0或∞ ,若(V_i,V_j)或者 <V_i,V_j>不是E(G)中的边\\ \end{cases} \]我们可以将这个结构进行封装为如下形式:
#define MaxVertexNum 100
typedef struct {
int Vex[MaxVertexNum];//存储当前顶点的表
int Edge[MaxVertexNum][MaxVertexNum];//邻接矩阵表
int vexnum, arcnum;//当前的顶点数和弧数
}
邻接矩阵存储表示法的特点:
- ①无向图的邻接矩阵一定是一个对称矩阵且唯一,因此我们可以使用三角矩阵压缩存储,就能节省一半的空间
- ②对于无向图邻接矩阵的第 \(i\) 行(列)的非 \(0\) 元素的个数就为第 \(i\) 个顶点的度
- ③对于有向图邻接矩阵,第 \(i\) 行(列)的非 \(0\) 元素的个数就为第 \(i\) 个顶点的出度(入度)
- ④邻接矩阵适合存储稠密图
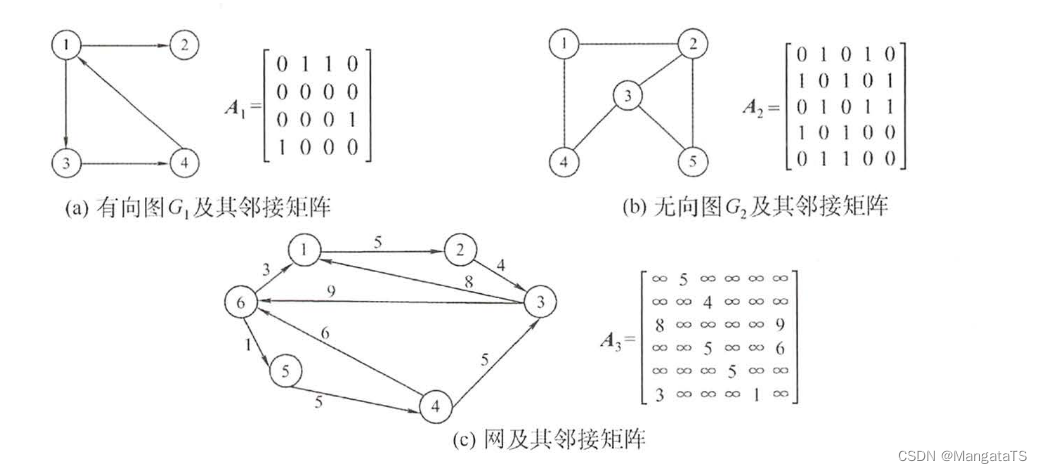
一些通过邻接矩阵存储的图的示例如下:
2.2 邻接表
我们对图中每一个顶点建一个单链表,然后链表的元素就为其所连接的点,这样就能节省大量的空间,这样的邻接表中存在两种类型的结点:顶点结点、边表结点

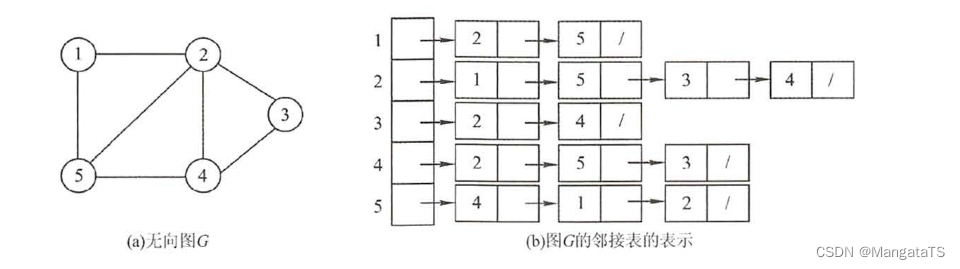
这个顶点结点就类似我们之前的头节点,下面是无向图和有向图的邻接链表的例子:
无向图:
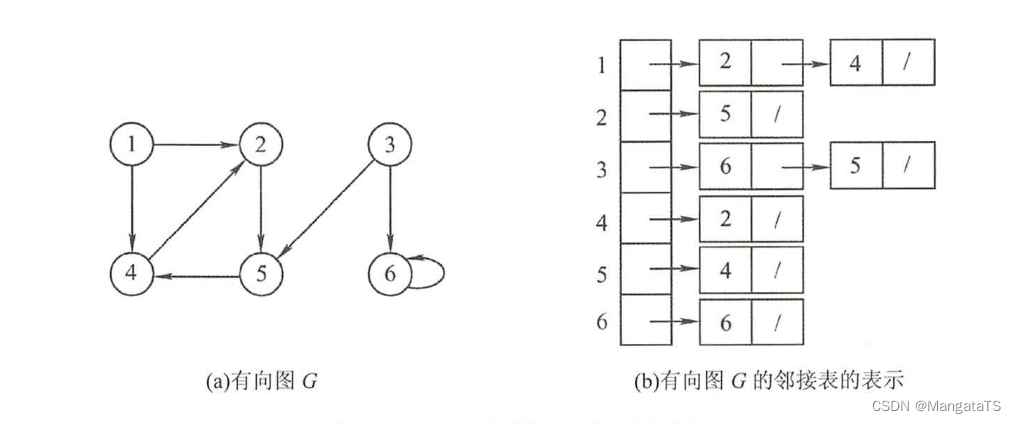
有向图:
我们可以简单得到一下这个邻接表的结构:
#define MaxVertexNum 100
typedef struct ArcNode{ //边表结点
int adjvex; //该弧指向的顶点的位置
struct ArcNode *next; //下一条弧的位置
// infoType info;
}ArcNode;
typedef struct VNode{ //顶点结点
VertexType data; //顶点的信息,例如值之类的
ArcNode *first;//第一个边表结点的位置
}VNode , AdjList[MaxVertexNum];
typedef struct{
VNode AdjList[MaxVertexNum]; //顶点结点数组
int vexnum,arcnum;//顶点数和弧数
} ALGraph;//封装的邻接表的图
邻接表存储方法特点:
- ①若图 \(G\) 为无向图,则邻接表所需的存储空间为 \(O(|V|+2|E|)\) ,若图 \(G\) 为有向图,则邻接表所需的存储空间为 \(O(|V|+|E|)\)
- ②邻接表适合稀疏图
- ③图的邻接表表示不唯一,取决于边的读入顺序
2.3 十字链表
首先来说,十字链表是对于有向图而言的,有一点邻接表和邻接矩阵结合的感觉,首先对于每一个顶点来说有一个顶点结点的概念,然后对于其指向的边结点有一个弧结点的概念
-
顶点结点有三个域
data域存放顶点相关的数据信息,firstin域指向以该顶点为弧头的第一个弧结点(比如这个结点是第二个结点,那么就指向第二列,从上往下看的第一个弧节点元素,当然若是没有的话则指向NULL)firstout域指向以该顶点为弧尾的第一个弧结点(比如这个结点是第三个结点,那么就指向第三行 的第一个弧结点元素)
-
弧结点有五个域
tailvex尾域表示弧尾的位置(显然对于某一行数据来说,弧尾域都是一样的)headvex头域表示弧头的位置(显然对于某一列数据来说,弧头域都是一样的)hlink链域指向弧头相同的下一条弧(其实就是对于每一列的弧结点元素来说,上下相邻的元素从上往下指)tlink链域指向弧尾相同的下一条弧(其实就是对于每一行的弧结点元素来说,左右相邻的元素从左往右指)info域一般用于弧的值的存储
例如如下有向图构建的十字链表:
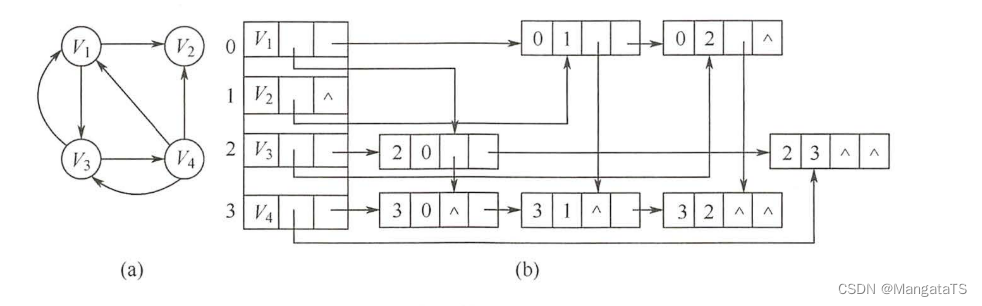
注意:上图中的弧结点没有info 域
2.4 邻接多重链表
邻接多重表是无向图的另一种链式存储结构,着重于边与边以及边与点的关系,与十字链表类似,邻接多重表也有顶点结点以及边结点
-
顶点结点有两个域
data域firstedge用于存储与该结点相连的第一条边
-
边结点有六个域(但是一般只用其中间的四个)
mark域用于标记这个边是否进行操作过,\(0\) 表示没操作过,\(1\) 表示操作过了ivex用于表示该边的其中一个结点在图中的下标ilink用于表示与结点ivex相邻的第一条边jvex用于表示该边的另一个结点在图中的下标jlink用于表示与结点jvex相邻的第一条边info用于表示该边的一些权值等信息
下面是一些绘制邻接多重表的步骤:
- ①我们仍然可以先画出该图的邻接表(但不要画箭头)
- ②因为该图是一个无向图,所以我们需要将重复的边进行删除(统一规划一下可以尽量从往上删除)
- ③然后从每一个顶点结点出发,指向边结点中与之对应的 \(ilink\) 或者 \(jlink\) 这里的话有两种方式
- 第一种按照 \(DFS\) 的方法,不断在边结点中找到下一个边结点的位置,直到完成所有的边,再从下一个顶点结点出发
- 第二种按照 \(BFS\) 的方法,首先找到第一个顶点结点的下一个相邻结点,然后再完成下一个顶点结点,然后再不断完成边界点的关系指向
例如假设我们有如下的图结构:
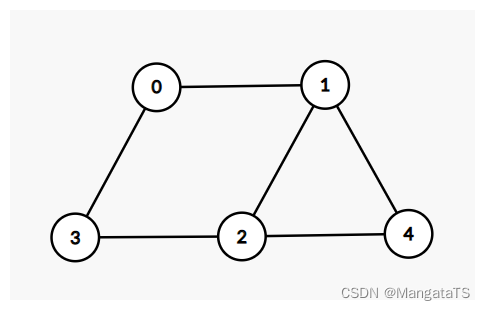
我们需要绘制邻接表,然后删除重复的边:
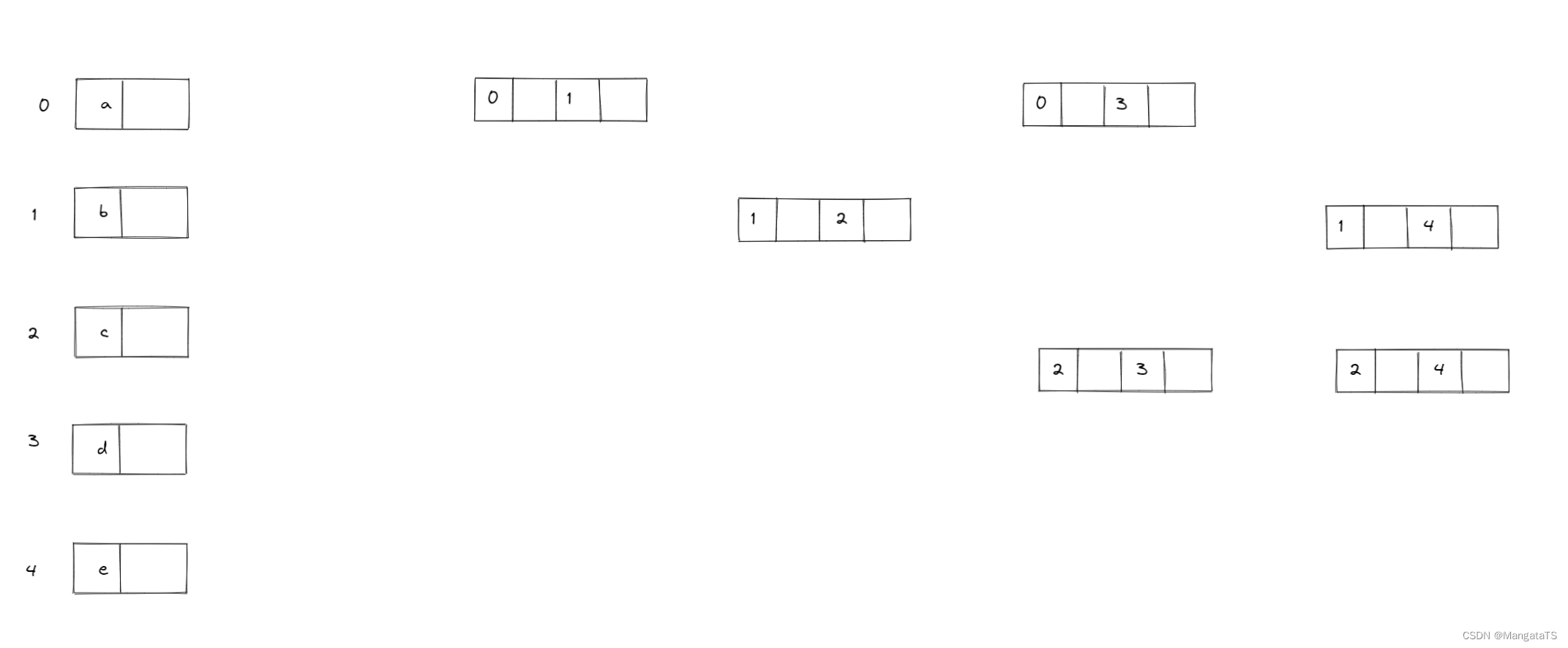
然后我们采用BFS的方法先完成顶点结点的指向

然后就是不断根据边结点进行连接了,于是我们就得到了多重邻接表的画法(当然多重邻接表不一定唯一)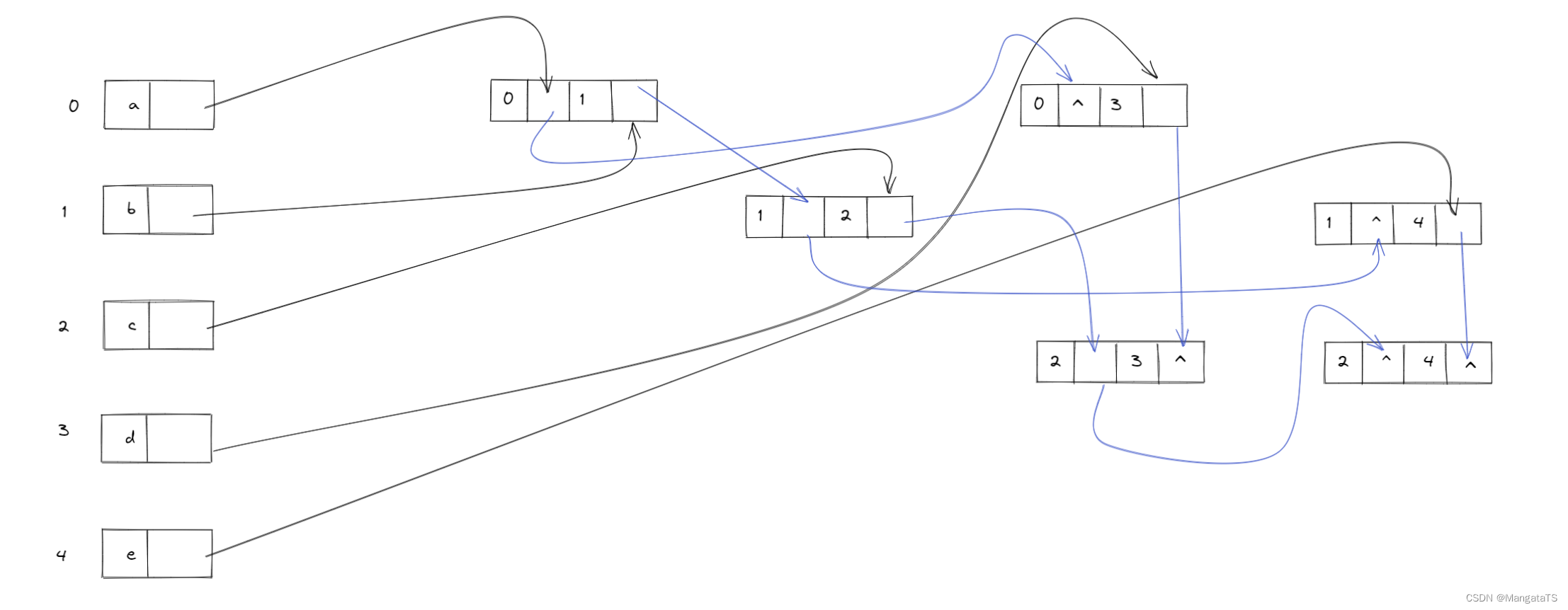
三、图的遍历方法
也可参见我的另一篇介绍:https://acmer.blog.csdn.net/article/details/122310835
3.1 广度优先搜索(BFS)
图的广度优先搜索类似于树的层序遍历,不断地将未访问的结点放入队列,然后出队,再将出队元素所连接的所有未访问点放入队列,这个当队列为空的时候,我们就完成了图的广度优先搜索,简单的搜索如下:
bool vis[N];
void bfs(int s){
queue<int> que;
que.push(s);
vis[s] = true;
while(!que.empty()){
int t = que.front();
que.pop();
printf("%d\t",t);
for(int i = 0,l = V[t].size();i < l; ++i) {
if(!vis[V[t][i]]){
que.push(V[t][i]);
vis[V[t][i]] = true;
}
}
}
}
void BFS_Traverse(int n) {
memset(vis,false,sizeof vis);
for(int i = 1;i <= n; ++i) {
if(!vis[i]) bfs(i);
}
}
当然另一个 \(BFS\) 的例子是求解单源最短路问题,用的是一个以 \(1\) 为源点,然后求得是到 \(n\) 的最短距离(当然边权都为 \(1\) )
int dis[N];
bool vis[N];
int bfs(){
memset(dis,0x3f,sizeof dis);
queue<int> que;
dis[1] = 0;
que.push(1);
vis[1] = true;
while(!que.empty()){
int t = que.front();
que.pop();
if(t == n)
return dis[n];
for(int i = 0,l = V[t].size();i < l; ++i) {
if(!vis[V[t][i]]){
que.push(V[t][i]);
dis[V[t][i]] = dis[t] + 1;
vis[V[t][i]] = true;
}
}
}
return -1;
}
ps :
① 如果是想输出这个最短路径的话,我们可以用一个数组记录每一步的前一个点的位置,然后递归输出一下即可
② 要是想获取层次遍历的结果,只需要在队首元素每次取出的时候输出即可
我们来分析 \(BFS\) 的时间和空间复杂度
- 邻接矩阵存储:时间复杂度为 \(O(|V|^2) = O(n^2)\) ,空间复杂度为 \(O(|V|) = O(n)\)
- 邻接表存储:时间复杂度为 \(O(|V| + |E|) = O(n + e)\) ,空间复杂度为 \(O(|V|) = O(n)\)
3.2 深度优先搜索(DFS)
\(DFS\) 即优先深度搜索,可能会从一个点开始往一个方向一直往下搜,然后搜到尽头后就回溯,直到当前连通块的所有的结点全都被搜索过,就停止递归搜索,一般来说 \(DFS\) 的代码都会十分简洁,但是常数耗时会非常大
bool vis[N];//结点被访问情况
vector<int> Edge[N];//存储的边
void DFS(int s){//当前访问的结点
if(vis[s]) return;
vis[s] = true;//标记访问
//do something
for(int i = 0,l = Edge[s].size();i < l; ++i) {
int v = Edge[s][i];
dfs(v);//递归搜索
}
}
void DFS_Traverse(int n) {
memset(vis,false,sizeof vis);
for(int i = 1;i <= n; ++i) {
if(!vis[i]) dfs(i);
}
}
我们可以明显看出 \(DFS\) 的代码较为简洁,我们来分析一下 \(DFS\) 的时间复杂度
- 邻接矩阵存储:时间复杂度为 \(O(|V|^2) = O(n^2)\) ,空间复杂度为 \(O(|V|) = O(n)\)
- 邻接表存储:时间复杂度为 \(O(|V| + |E|) = O(n + e)\) ,空间复杂度为 \(O(|V|) = O(n)\)
四、图的基本应用
4.1 最小生成树
最小生成树算法在我另一篇博客有较为详细的讲解:
https://acmer.blog.csdn.net/article/details/118560004
4.2 最短路径
最短路径算法在我另一篇博客有较为详细的讲解:(包括Floyd、bellman、SPFA、Dijkstra)
https://acmer.blog.csdn.net/article/details/123040285
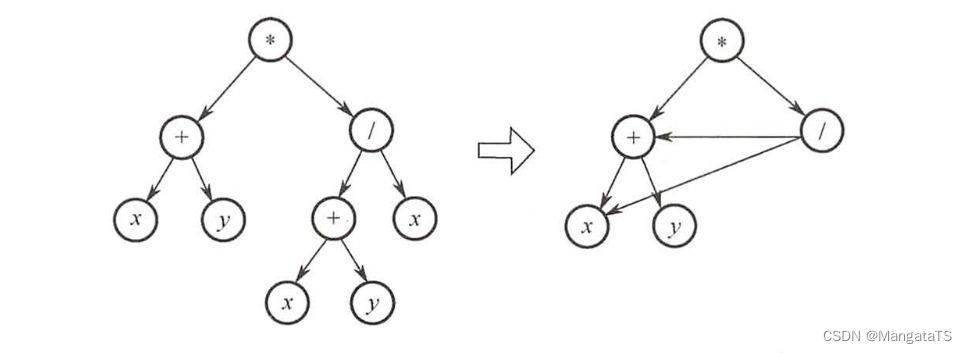
4.3 有向无环图描述表达式
有向无环图:字面意思一个不存在环的有向图,简称 \(DAG\) 图
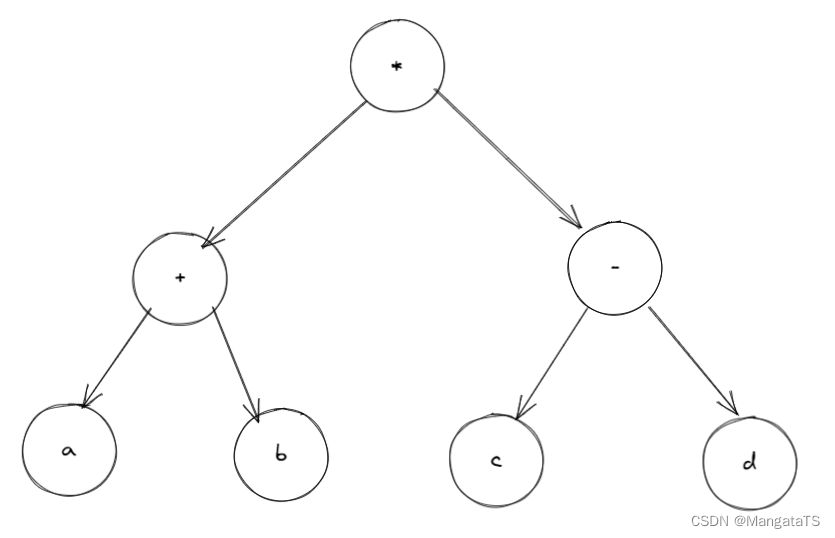
对于一个中缀表达式,我们首先是能够将其转化为二叉树的,例如:对于该表达式 \((a+b)(c-d)\) 的二叉树结构如下:
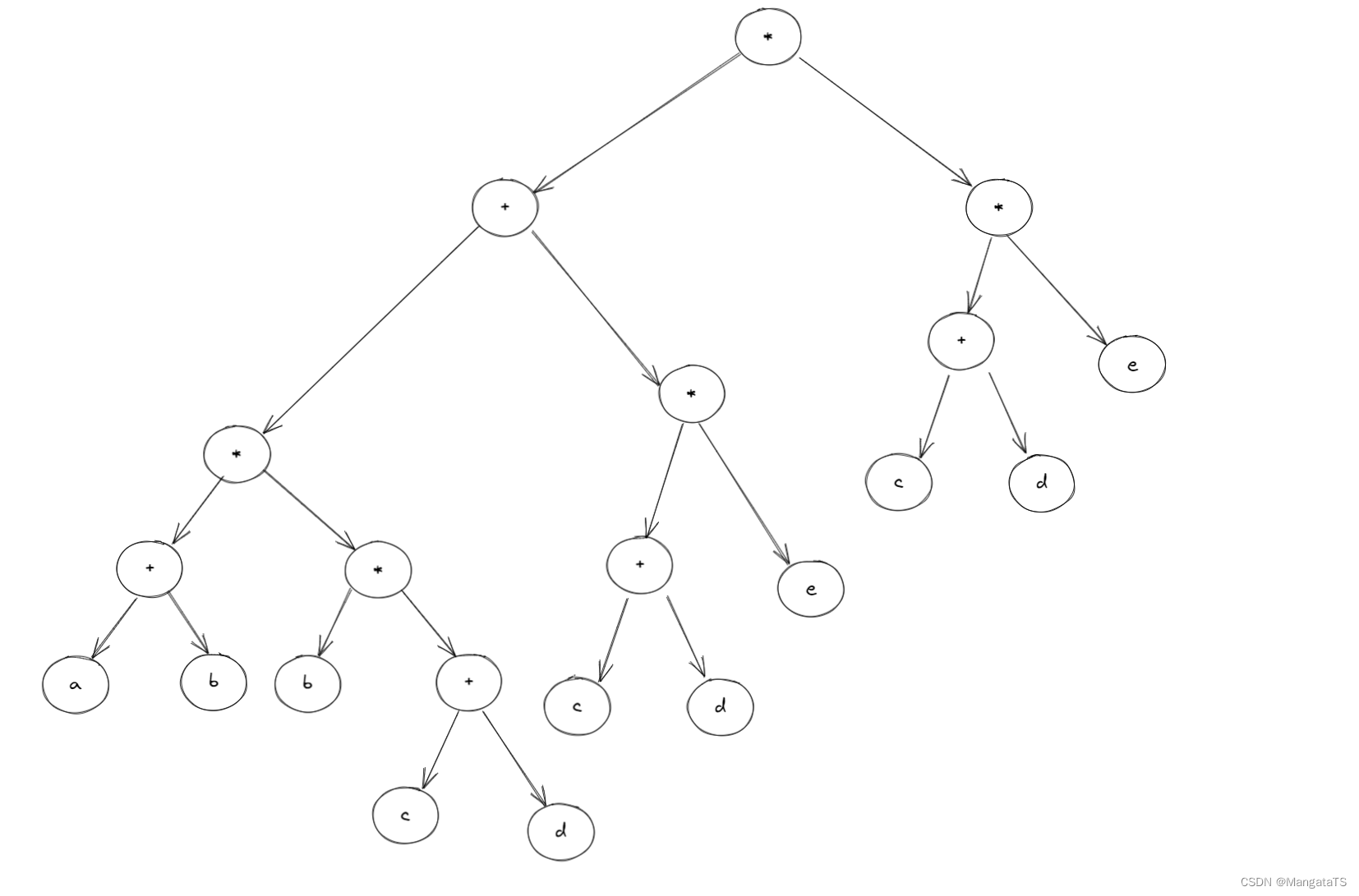
再来个复杂点的表达式:
还是先画出这个表达式的二叉树结构
我们发现对于根结点的右子树 \((c+d)*e\) 其实可以删掉,,用根节点指向另一个一样的子树结点,于是得到了如下结构:
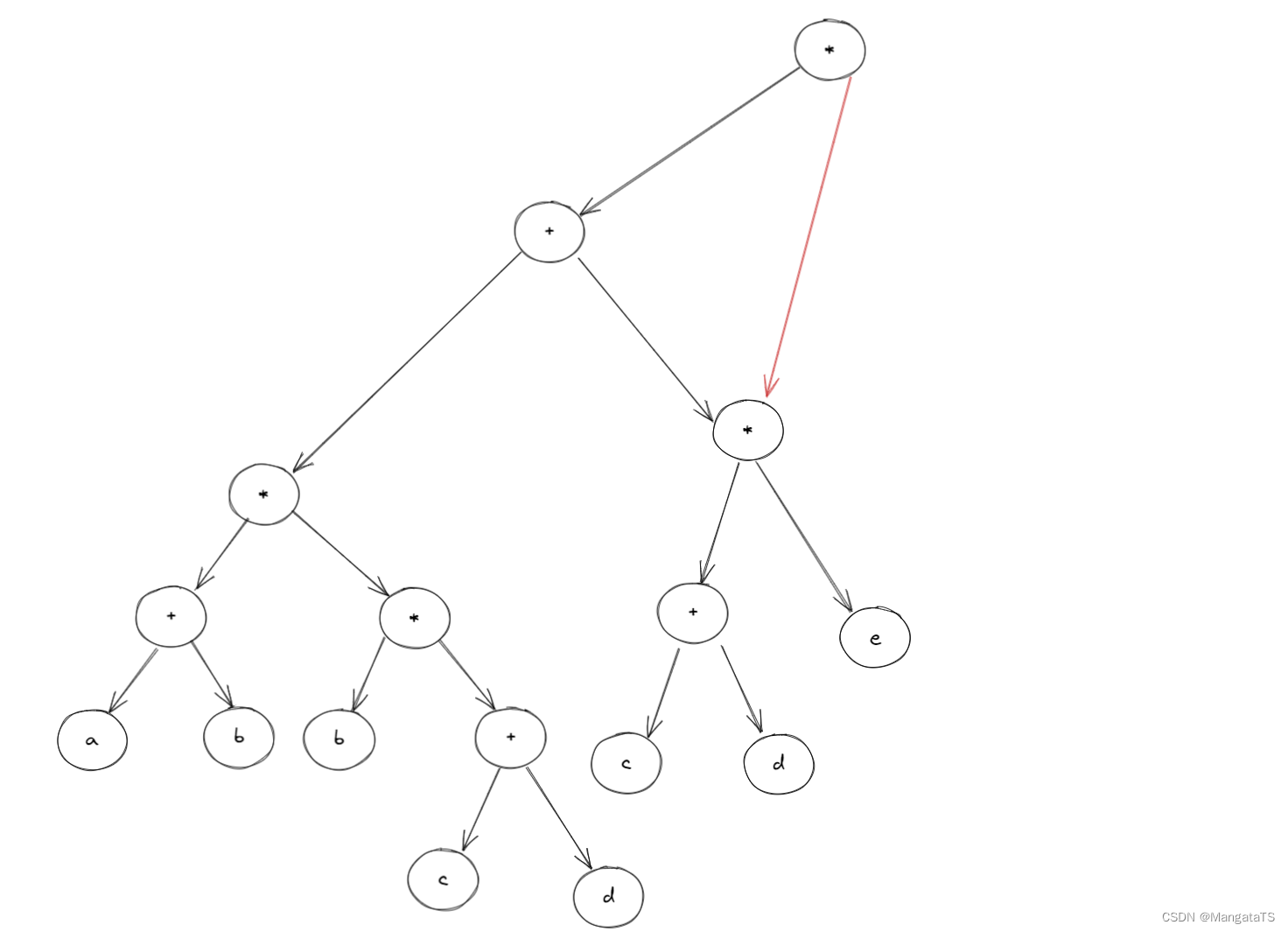
然后我们发现子树结构 \((c+d)\) 其实也是重复的,于是我们决定删除一个,就得到了如下结构:

然后我们发现结点 \(b\) 其实也是重复的,于是我们删除一个就得到了:
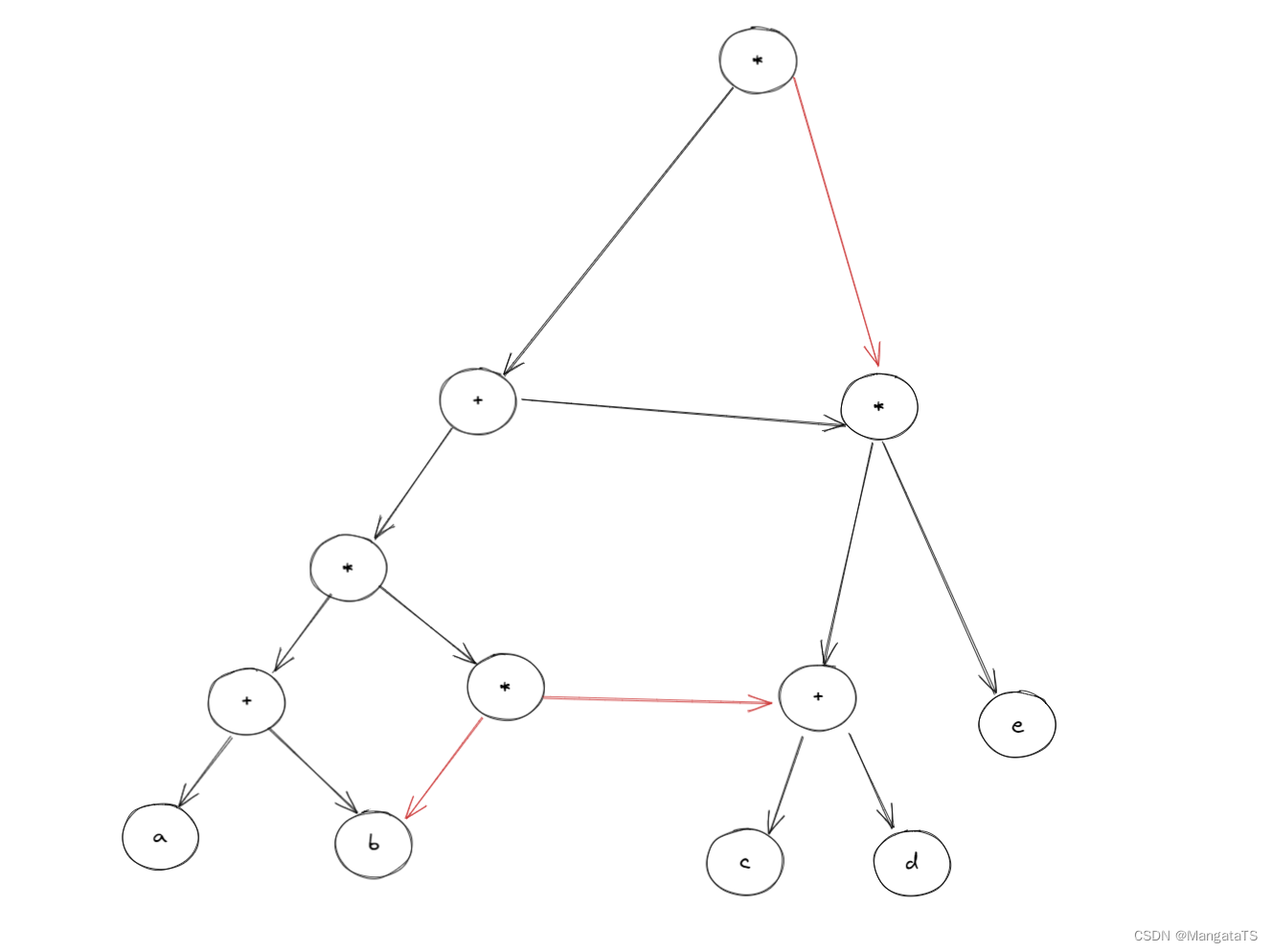
我们发现化二叉树为 \(DAG\) 图的时候实际上就是将二叉树重复的子树删掉,并且将分支结点指向其中一个子树即可
4.4 拓扑排序
拓扑排序算法在我另一篇博客有较为详细的讲解:
https://acmer.blog.csdn.net/article/details/126533628
4.5 关键路径
关键路径算法在我另一篇博客有较为详细的讲解:
https://acmer.blog.csdn.net/article/details/126537260
五、错题
选择题
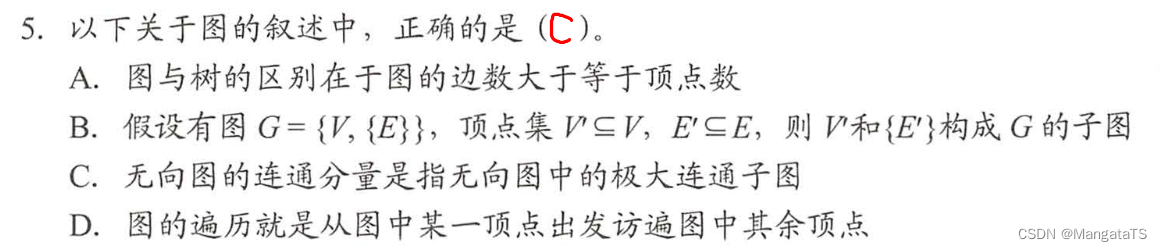
若 \(E'\) 中的边对应的顶点不是 \(V'\) 的元素, \(V'\) 和 \({E'}\) 无法构成图,故选项 \(B\) 错
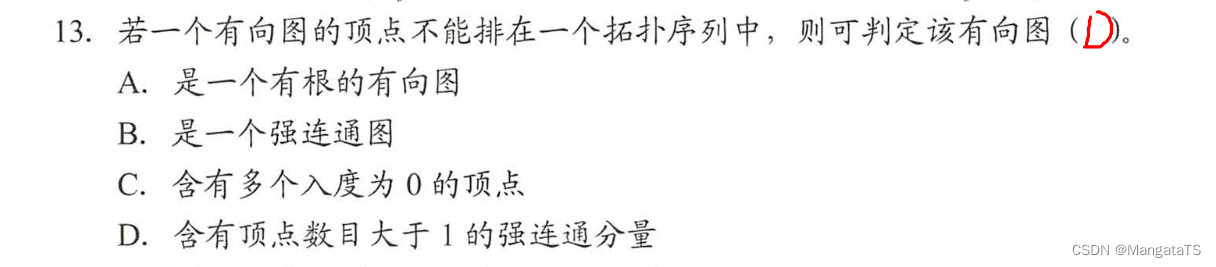
且若图非连通, 则从某一顶点出发无法出问到其他全部顶点,选项 \(D\) 的说法不准确
若无向图中本来就是连通的,那么该图有且只有一个连通分量(极大连通子图)就是其本身(若是其子集构成的新无向图则不是原图的连通分量,而是属于新图的连通分量)
若无向图不是连通的,那么其每一个连通子图都是一个连通分量
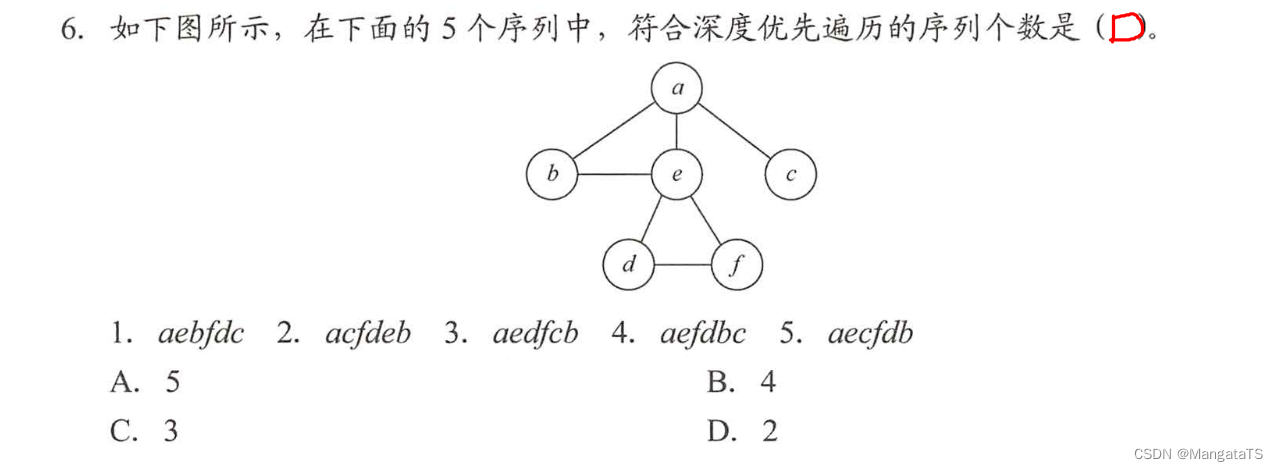
这里符合深度优先遍历的序列数只有第一个以及第四个,其余都不符合
判断有向图中是否存在回路,除可以利用拓扑排序外,还可以利用什么算法? \((C)\)
- A. 求关键路径的方法
- B. 求最短路径的 Dijkstra 算法
- C. 深度优先边历算法
- D. 广度优先选历算法
解析:利用深度优先遍历可以判断图 \(G\) 中是否存在回路。对于无向图来说,若深度优先遍历过程中遇到了回边,则必定存在环;对于有向图来说,这条回边可能是指向深度优先森林中另一棵生成树上的顶点的弧;但是,从有向图的某个顶点 \(v\) 出发进行深度优先遍历时,若在 \(DFS(v)\)结束之前 出现一条从顶点 \(u\) 到顶点 \(v\) 的回边,且 \(u\) 在生成树上是 \(v\) 的子孙,则有向图必定存在包含顶点 \(v\) 和顶点 \(u\) 的环

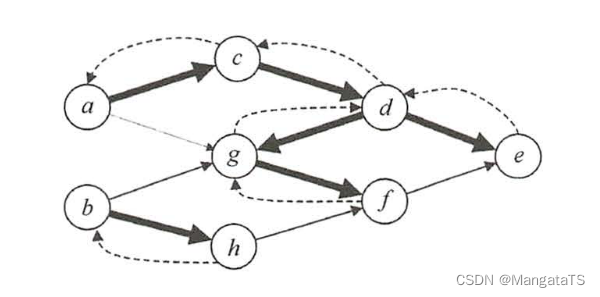
对一个有向图做深度优先遍历,并未专门判断有向图是否有环(有向回路〉存在,无论图中 是否有环,都得到一个顶点序列。若无环,在退出边归过程中输出的应是逆拓扑有序序列。对有向无环图利用深度优先搜索进行拓扑排序的例子如下:
如下图所示,退出 \(DFS\) 栈的顺序为 \(efgdcahb\) ,此图的一个拓扑序列为 \(bhacdgfe\) 。该方法的每一步均是先输出当前无后继的结点,即对每个结点 \(v\) ,先递归地求出 \(v\) 的每个后继的拓扑序列。 对于一个\(AOV\) 网,按此方法输出的序列是一个逆拓扑序列 。
若不存在拓扑排序,则表示圈中必定存在回路,该回路构成一个强连通分量
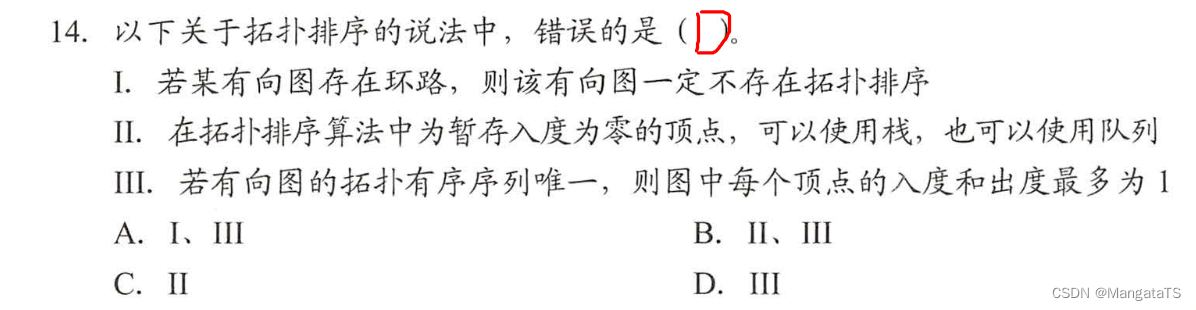
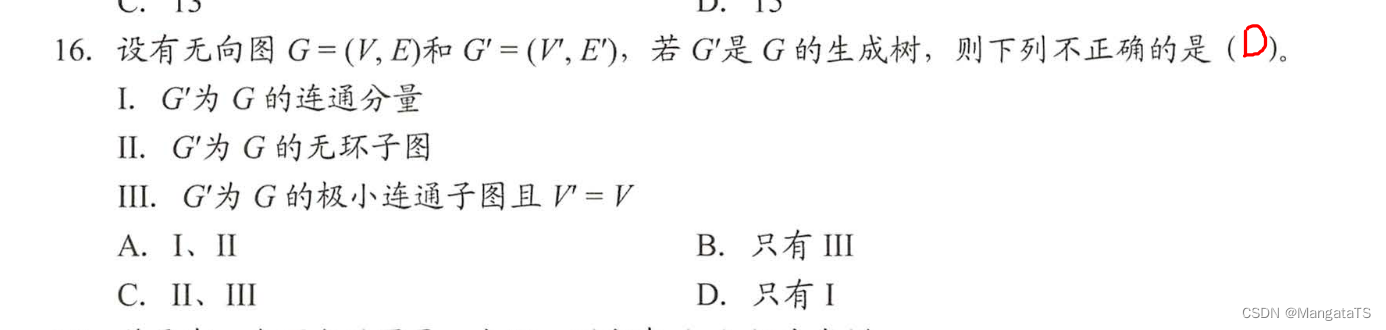
- \(Ⅰ\) 中,对于一个存在环路的有向图,使用拓扑排序算法运行后,肯定会出现有环的子图,在此环中无法再找到入度为 \(0\) 的结点,拓扑排序也就进行不下去。
- \(Ⅱ\) 中,注意,若两个结点之间不存在祖先或子孙关系,则它们在拓扑序列中的关系是任意的(即前后关系任意),因此使用栈和队列都可以,因为进栈或队列的都是入度为 \(0\) 的结点,此时入度为 \(0\) 的所有结点是没有关系的。
- \(Ⅲ\) 中,若拓扑有序序列唯一,则很自然地让人联系到一个线性的有向图(错误),下图的拓扑序列也是唯一的,但度却不满足条件
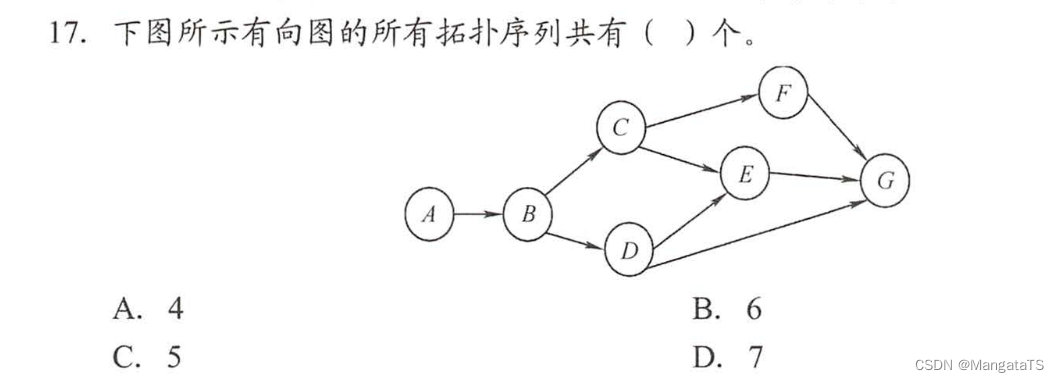
总共有五种:
ABCDEFGABCDFEGABDCEEGABDCFEGABCFDEG
- \(Ⅰ\) :有向图中的度为入度加出度,而矩阵中第 \(V\) 行只能代表点 \(V\) 的出度数
- \(Ⅱ\) :无向图的邻接矩阵一定是对称矩阵,有向图的邻接矩阵也有可能是对称矩阵
- \(Ⅲ\) :最小生成树中的 \(n-1\) 条边并不能保证是图中权值最小的 \(n - 1\) 条边, 因为权值最小的 \(n-1\) 条边并不一定能使图连通,所以会存在某条边权值超过未选的边
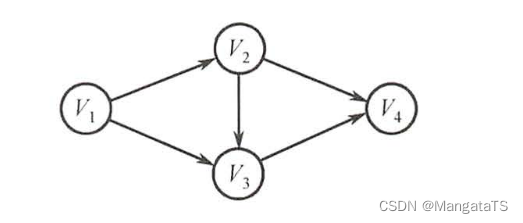
- \(Ⅳ\) :有向无环图的拓扑序列唯一并不能唯一确定该图。在下图所示的两个有向无环图中,拓扑序列都为\(V_1, V_2, V_3,V_4\)


标签:图论,有向图,1.2,连通,路径,结点,顶点,数据结构,考研 From: https://www.cnblogs.com/Mangata/p/16634336.html先将该表达式转换成有向二叉树,注意到该二叉树中有些顶点是重复的,为了节省存储空间, 可以去除重复的顶点(使顶点个数达到最少),将有向二叉树去重转换成有向无环图,如下图所示。