前言
线段树,是一种优秀的数据结构,其应用极为广泛。其中,动态开点值域线段树,配合上线段树合并,甚至能替代或超越平衡树。但是,这种线段树的树高与值域相关,很容易产生四五倍常数。无论考虑时间或空间复杂度,这样的树都不算优。那么,我们是否能想办法优化它呢?
优化思想
正如上文所述,普通线段树(本文中特指动态开点线段树,下同)的树高和值域相关。叶结点稀疏时,树上会存在若干孤链,如下图:
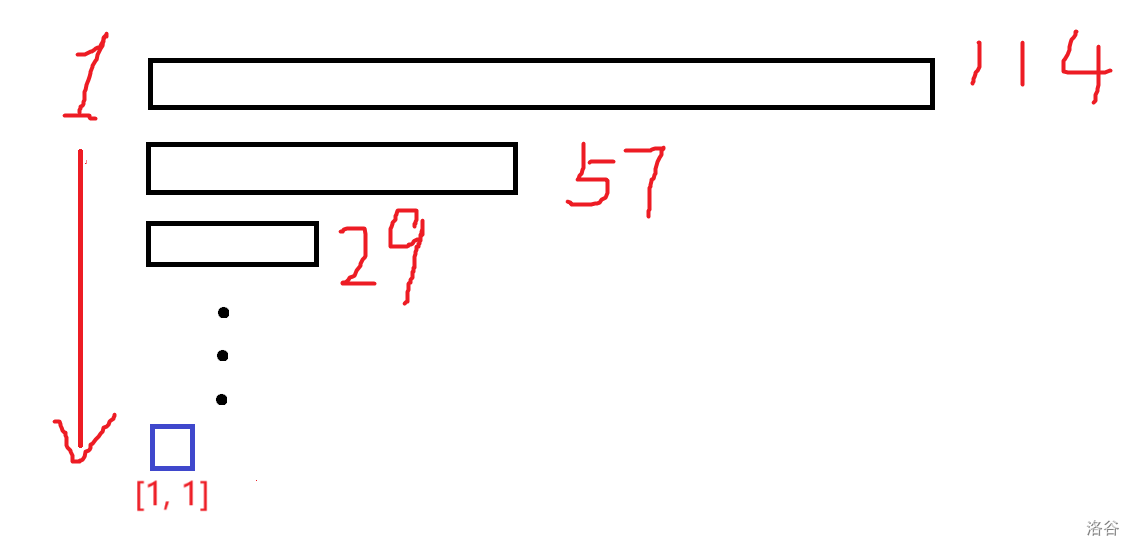
这些链唯一的作用是,连接根与叶结点。显然,这其中有巨大的优化空间。我们的思想很简单,压缩树高!准确来说,我们把任意时刻的线段树,都视为压缩后的树,并在此基础上做“扩展”。每次修改只新建少数必要的结点,从而间接起到压缩树结构的效果。
另外,为防止毒瘤数据卡结构,还需要一个“收缩”操作,动态删除无意义的叶结点,微调整棵树的结构。(虽然整棵树的结构问题不在这儿)
实现方法
首先,我们将下文中的普通线段树称为原树,将与之对应合法的、压缩后的树称为压缩树。
压缩了树高,自然丢失了区间左右端点信息。所以,我们需要在每个结点上存储,其对应的叶结点区间 $[s, t]$。为了实现方便,我们规定(很重要!):
- 压缩树结点上任意的 $[s, t]$ 区间,都必须对应原树上的某一 $[l, r]$ 区间。
- 原树上一个点,经压缩后,只能挂在其若干级祖先的位置上。不能挂在兄弟或儿子,或其他地方。(当然,也可以直接删去)
也就是说,压缩后树上的点,必须和原树一一对应。即,压缩树结点集合到原树结点集合的映射,必须是一个单射。并且,压缩树上的任意一点,只可能是其子树内的结点。下图是一个原树与压缩树对应的例子:
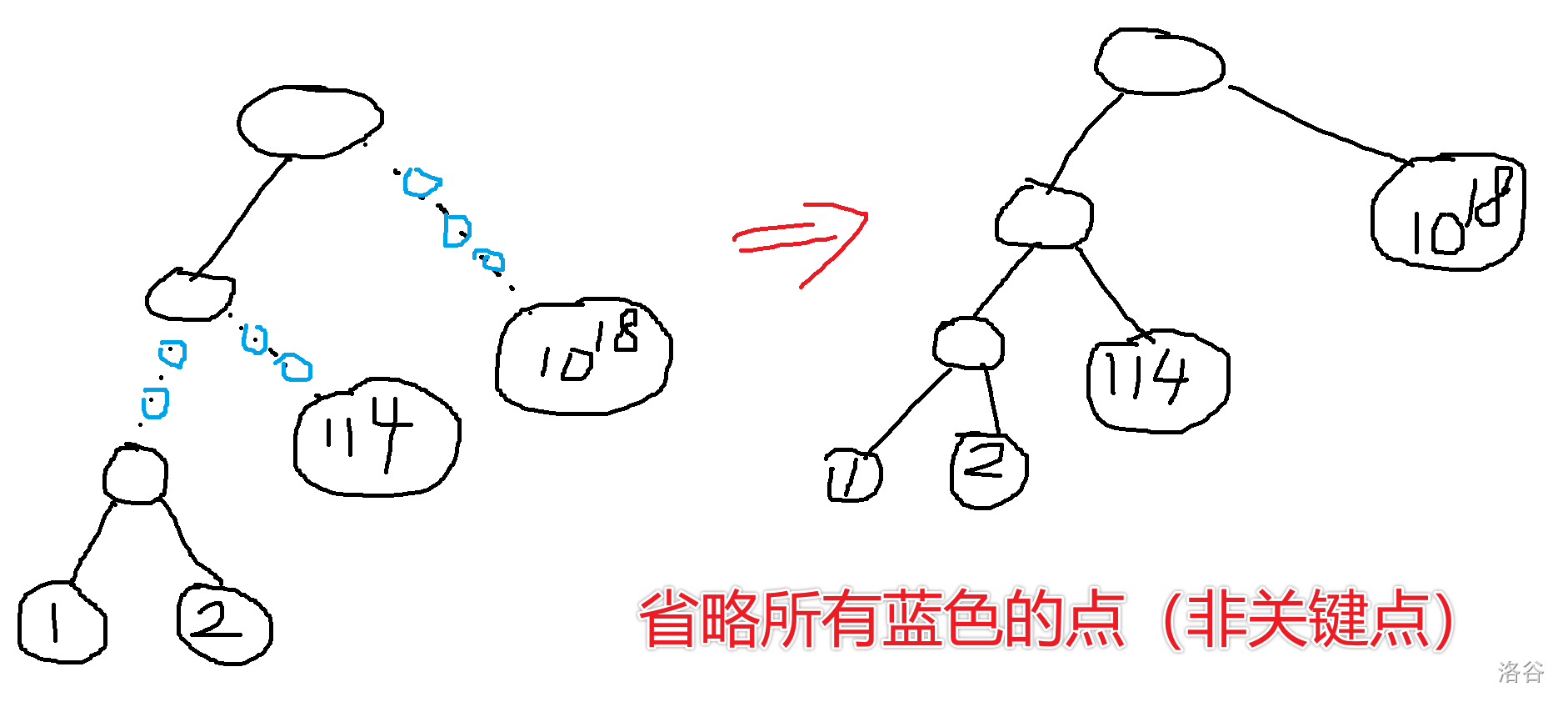
不难发现,压缩树确实比原树矮了不少。要实现这样的压缩,大力分类讨论是少不了的。在这里,我提供一种分类讨论的顺序:先空,再包含,最后相离。以这个顺序讨论,可以最大程度地简化代码。接下来我会以一棵,单点修改区间查询线段树为例,从代码层面剖析整棵树。
结点信息
如上文所述,树上结点的结构体是这样的:
struct Segt {
int val; // 维护的区间和信息
int s, t; // 代表 [s, t] 区间
Segt *le, *ri; // 指向左右子结点的指针
Segt(); Segt(int val, int s, int t, Segt* le, Segt* ri);
} null_(0, 0, 0, &null_, &null_), *null = &null_;
// 补全构造函数
Segt::Segt(): val(0), s(0), t(0), le(null), ri(null) {}
Segt::Segt(int val, int s, int t, Segt* le, Segt* ri): val(val), s(s), t(t), le(le), ri(ri) {}
需要动态开点时,本人喜欢用指针树。需要注意,最好新建一个点代表空结点,不要用 nullptr,否则很容易访问到空地址,导致 RE。
辅助函数
在介绍修改、查询、合并操作前,我们需要先实现三个辅助函数:
pushup
void pushup(Segt* u) {
if (u->s == u->t) return; // 跳过叶子结点
u->val = u->le->val + u->ri->val;
}
因为线段树是 Leafy Tree,所以最好别对叶子结点做 pushup。可以通过区间端点信息,辨认叶子结点。
adjust
bool adjust(int x, int y, int &l, int &r) {
int mid = (l + r) >> 1;
if (x <= mid && y <= mid) return r = mid, true;
if (mid < x && mid < y) return l = mid + 1, true;
return false;
}
在代码中使用 while(adjust(x, y, l, r));,可以快速找到一组 $[l, r]$,使得 $x \in [l, mid], y \in [mid + 1, r]$,其中 $mid = \lfloor \frac{l + r}{2} \rfloor$。也就实现了在压缩树上,遍历原树一些不必要的结点。
maintain
void maintain(Segt*& u) {
if (u->s == u->t) {
if (u->val == null->val) u = null;
}
else if (u->le == null) u = u->ri;
else if (u->ri == null) u = u->le;
}
这个函数实现了收缩操作。但是,不收缩的压缩树,在时间上也足以应对常见的题目(可用可不用)。因此,收缩操作的优化,更多体现在空间复杂度上。
现有两种情况需要收缩:
- (叶结点)点权为 0,对答案没有贡献。
- (非叶结点)位于一条链上,即只有一个儿子。
另外,如果当前点非叶结点,又没有儿子,应当直接删去。不过上述代码兼容了这种情况,在实现上可以忽略。
单点修改
void update(Segt*& u, int l, int r, int pos, int val) {
// 当前结点为空
if (u == null) {
u = node(pos, pos, val); // 直接新建一个叶结点,返回
return;
}
// 当前结点包含待修改位置
if (u->s <= pos && pos <= u->t) {
// 如果是叶子
if (u->s == u->t) {
u->val += val;
// maintain(u);
return;
}
// 如果不是叶子,正常递归
int mid = (u->s + u->t) >> 1;
if (pos <= mid) update(u->le, u->s, mid, pos, val);
else update(u->ri, mid + 1, u->t, pos, val);
}
// 当前结点不包含待修改位置
else {
while (adjust(u->s, pos, l, r)); // 在原树上找到一个合适的点 [l, r]
Segt *v = node(pos, pos, val);
// 此时,u v 必然在 mid = (l + r) / 2 的两边,挂上去即可
if (v->s < u->s) swap(u, v);
u = node(l, r, u, v);
}
pushup(u);
// maintain(u);
}
我们以 空、包含、相离 的顺序讨论,不难发现,“包含”部分的写法和普通线段树几乎一样,只是用 u->s, u->t 代替了平时的 l, r。你可以先这样理解:$[s, t]$ 才是真正的区间范围,$[l, r]$ 只是用来调整压缩树结构的。我们很贪心,只要满足条件,就新建结点并立刻返回,实在不行再递归。
区间查询
int query(Segt* u, int L, int R) {
if (u == null) return 0;
if (L <= u->s && u->t <= R) return u->val;
int mid = (u->s + u->t) >> 1;
if (R <= mid) return query(u->le, L, R);
if (mid < L) return query(u->ri, L, R);
return query(u->le, L, R) + query(u->ri, L, R);
}
没什么好说的,就是很普通的区间查询。特殊的是,我们已经在结点上存储了,区间左右端点的信息,因此不再需要传入 $[l, r]$ 作为函数参数。
线段树合并
Segt* merge(Segt* u, Segt* v, int l, int r) {
if (u == null) return v;
if (v == null) return u;
// 保证 u 的区间长度比 v 大
if (u->t - u->s < v->t - v->s) swap(u, v);
// u = copy(u); 可持久化合并,在这里复制一份 u 即可
if (u->s <= v->s && v->t <= u->t) { // 如果包含
if (u->s == u->t) { // 叶子合并
u->val += v->val;
// maintain(u);
return u;
}
// 非叶子合并,要判断 u 和 v 的区间关系
int mid = (u->s + u->t) >> 1;
// 如果 v 在 u 的半边,用 u 的一半与 v 合并,否则正常合并
if (v->s <= mid) u->le = merge(u->le, v->t <= mid ? v : v->le, u->s, mid);
if (mid < v->t) u->ri = merge(u->ri, mid < v->s ? v : v->ri, mid + 1, u->t);
} else {
// 不包含,处理方法与修改操作相同
while (adjust(u->s, v->s, l, r));
if (v->s < u->s) swap(u, v);
u = node(l, r, u, v);
}
pushup(u);
// maintain(u);
return u;
}
还是 空、包含、相离 的顺序。需要注意,“包含”递归时需要特殊判断 u 和 v 的区间关系,“相离”的处理逻辑与修改操作很像,也是,先调整 $[l, r]$ 位置,再新建一个点返回。
线段树分裂
我不会,没写。 应该可以直接分裂,回溯时用 maintain 收缩一下就好了。
完整代码
整棵树写起来并不长,分类讨论也很好记,没有很麻烦。上文中写得长,是因为有注释,稍微压行后就很短了。(合理压行)
另外,线段树如何动态开点,就不用多说了吧?看代码应该能懂。
// 结构体
struct Segt {
int val, s, t;
Segt *le, *ri;
Segt(); Segt(int val, int s, int t, Segt* le, Segt* ri);
} null_(0, 0, 0, &null_, &null_), *null = &null_;
Segt::Segt(): val(0), s(0), t(0), le(null), ri(null) {}
Segt::Segt(int val, int s, int t, Segt* le, Segt* ri): val(val), s(s), t(t), le(le), ri(ri) {}
void pushup(Segt* u) {
if (u->s == u->t) return;
u->val = u->le->val + u->ri->val;
}
// 创建结点
Segt pool[N_ * 10]; int psz;
Segt* node() { return pool + (++psz); }
Segt* node(int val, int s, int t, Segt* le, Segt* ri) { Segt *u = node(); *u = Segt(val, s, t, le, ri); return u; }
Segt* node(int s, int t) { return node(0, s, t, null, null); }
Segt* node(int s, int t, int val) { return node(val, s, t, null, null); }
Segt* node(int s, int t, Segt* le, Segt* ri) { Segt *u = node(0, s, t, le, ri); return pushup(u), u; }
// 调整 [l, r]
bool adjust(int x, int y, int &l, int &r) {
int mid = (l + r) >> 1;
if (x <= mid && y <= mid) return r = mid, true;
if (mid < x && mid < y) return l = mid + 1, true;
return false;
}
// 收缩
void maintain(Segt*& u) {
if (u->s == u->t) { if (u->val == null->val) u = null; }
else if (u->le == null) u = u->ri;
else if (u->ri == null) u = u->le;
}
// 单点修改
void update(Segt*& u, int l, int r, int pos, int val) {
if (u == null) return u = node(pos, pos, val), void();
if (u->s <= pos && pos <= u->t) {
if (u->s == u->t) return u->val += val, maintain(u), void();
int mid = (u->s + u->t) >> 1;
if (pos <= mid) update(u->le, u->s, mid, pos, val);
else update(u->ri, mid + 1, u->t, pos, val);
} else {
while (adjust(u->s, pos, l, r));
Segt *v = node(pos, pos, val);
if (v->s < u->s) swap(u, v);
u = node(l, r, u, v);
} pushup(u), maintain(u);
}
// 区间查询
int query(Segt* u, int L, int R) {
if (u == null) return 0;
if (L <= u->s && u->t <= R) return u->val;
int mid = (u->s + u->t) >> 1;
if (R <= mid) return query(u->le, L, R);
if (mid < L) return query(u->ri, L, R);
return query(u->le, L, R) + query(u->ri, L, R);
}
// 线段树合并
Segt* merge(Segt* u, Segt* v, int l, int r) {
if (u == null) return v;
if (v == null) return u;
if (u->t - u->s < v->t - v->s) swap(u, v);
if (u->s <= v->s && v->t <= u->t) {
if (u->s == u->t) return u->val += v->val, maintain(u), u;
int mid = (u->s + u->t) >> 1;
if (v->s <= mid) u->le = merge(u->le, v->t <= mid ? v : v->le, u->s, mid);
if (mid < v->t) u->ri = merge(u->ri, mid < v->s ? v : v->ri, mid + 1, u->t);
} else {
while (adjust(u->s, v->s, l, r));
if (v->s < u->s) swap(u, v);
u = node(l, r, u, v);
} return pushup(u), maintain(u), u;
}
性能分析
假设存在一个问题,共有 $M$ 次操作,线段树的下标范围是 $[1, N]$。
时间复杂度
update / query
一般 $O(\log M)$;最坏 $O(\log N)$;
这里的最坏情况中,所有下标为 $2 ^ n + 1$ 的点都在线段树中,这足以将整棵树卡成一条“有用的链”。
实际的复杂度取决于树高,以及数据的分布。
merge
我不会分析。大概可以近似成两棵普通线段树合并。复杂度应该与树高相关。
空间复杂度
update / merge
严格 $O(M)$。前者每次调用最多新建两个结点,后者最多一个。
常数
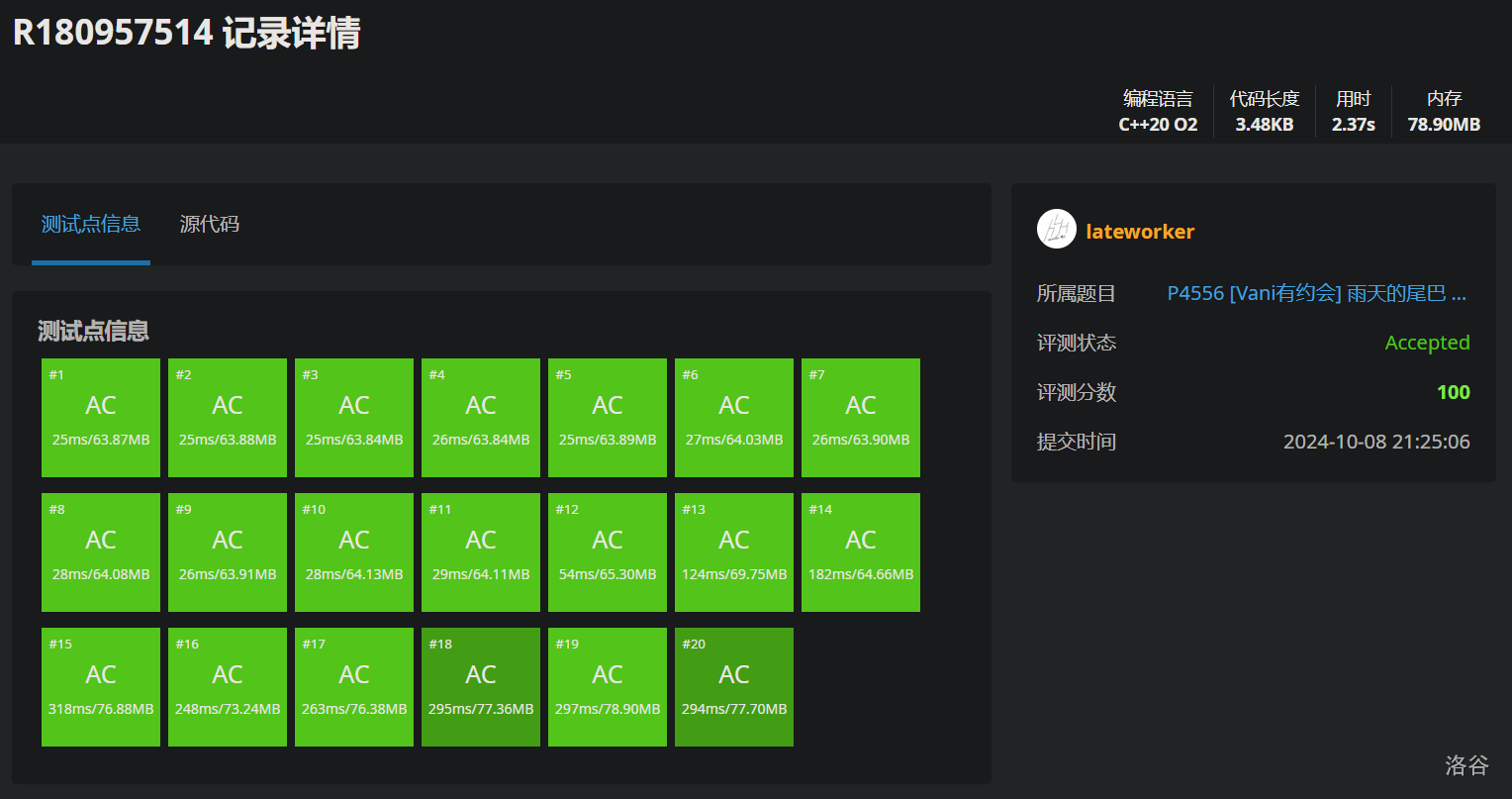
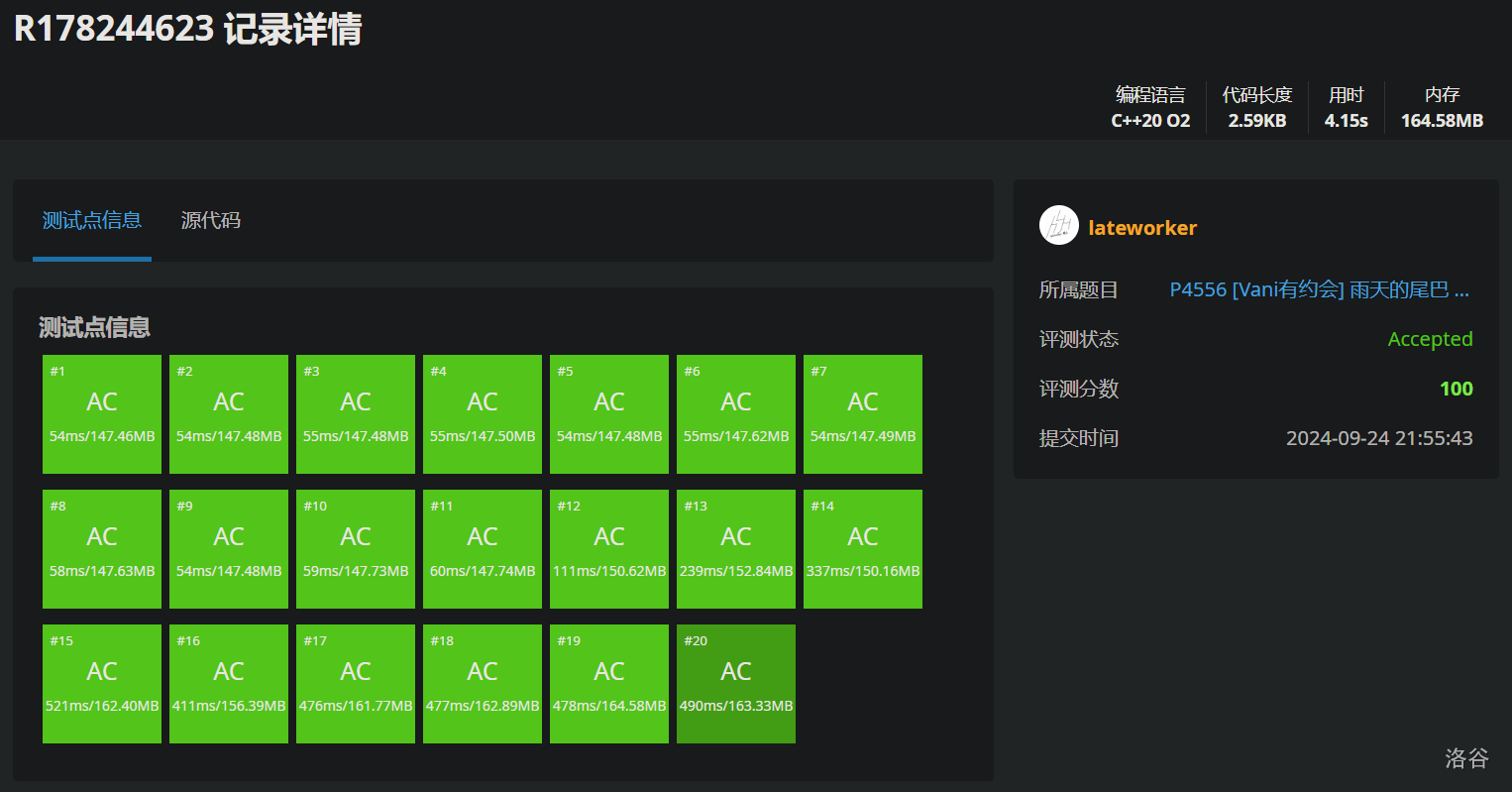
显然比普通树更小。直接看对比图(线段树合并模板):
压缩树
原树
结语
实际上,如果你的算法功底足够深厚,就会发现,压缩树其实就是原树的,一棵不严格的虚树。只不过,用虚树的方法,维护严格的虚树过于麻烦,使用扩展树高的技巧,实现起来会简单一些。如果你对严格的虚树优化感兴趣,不妨自行阅读这篇文章:浅谈维护叶子节点及其所构成的虚树的一类线段树
综上,压缩过树高的线段树,相比一般的动态开点线段树,无论在时间或空间,复杂度或常数方面,都更加优秀。并且,相比于严格的虚树实现,“扩展树”的实现显然码量更小,更容易记忆理解。我个人认为,这是一种十分普信的数据结构(优化),并且完全可以应用于实战中。
此外,本人经过几天搜索,未找到类似的文章。故单方面把这种优化后的线段树,命名为“Dest 树”(Dynamic Extension Segment Tree)。若已存在其它名字,请诸位及时告知我,以撤销本命名。
后记
分析时间复杂度时,才发现会被卡时间(空间不会)。难受了。但是,被卡总比不优化好,也算是咱研究了好几天的成果啊。最终决定,还是要写本文,将其公之于众。
标签:le,浅谈,val,DEST,Segt,线段,int,null,ri From: https://www.cnblogs.com/lateworker/p/18459326