标签: Diffusion right mathbf 代码 frac DDPM alpha xt left
Diffusion 论文:Denoising Diffusion Probabilistic Models
参考博客open in new window ;参考 paddle 版本代码: aistudio 实践链接open in new window
该文章主要对 DDPM 论文中的公式进行小白推导,并根据 ppdiffuser 进行 DDPM 探索。读者能够对论文中的大部分公式如何得来,用在了什么地方有初步的了解。
本文将包括以下部分:
DDPM 总览 Forward process: 包括论文中公式推导,以及其在 ppdiffusor 中代码参考 Reverse process: 包括论文中公式推导,以及其在 ppdiffusor 中代码参考 优化目标推导:包括论文中公式推导,以及简单的伪代码描述 探索与思考:通过打印,修改 ppdiffusor ddpm 代码,探索 DDPM 模型。 DDPM 总览 扩散模型在 2015 年已经被提出(Deep Unsupervised Learning using Nonequilibrium Thermodynamicsopen in new window ),而 DDPM 将扩散模型应用在了图像生成领域上。
DDPM 的大致思想是:用 AI 构建一个模型,相比于一步到位生成图像,我们让这个模型每次生成一小步,经过 T 步后,图像就完成了。
img 如上图,给定原图片 x 0 x_0 x t − 1 x_{t-1} x t x_t x t x_t
而后我们训练模型,使其能根据带有噪声的图片 x t x_{t} x t − 1 x_{t-1}
Forward Process 给定原图片 x 0 x_0 x 1 , x 2 , . . . , x T x_1, x_2, ..., x_T ϵ t = N ( 0 , 1 ) \epsilon_t = N(0,1) q ( x t ∣ x t − 1 ) = N ( x t ; 1 − β t x t − 1 , β t I ) q(x_t|x_{t-1}) =N (x_t; \sqrt {1-\beta_t} x_{t-1}, \beta_tI)
x t = α t x t − 1 + β t ϵ t (1) x_t = \sqrt\alpha_t x_{t-1} + \sqrt\beta_t\epsilon_t\tag 1
其中 α t = 1 − β t \alpha_t = 1-\beta_t ( 1 ) (1)
x t = α t . . . α 1 x 0 + α t . . . α 2 β 1 ϵ 1 + . . . + α t β t − 1 ϵ t − 1 + β t ϵ t ⏟ 噪声项 (2) x_t = \sqrt {\alpha_t...\alpha_1}x_0 +\underbrace {\sqrt {\alpha_t...\alpha_2\beta_1}\epsilon_1 + ... +\sqrt {\alpha_t\beta_{t-1}}\epsilon_{t-1} + \sqrt\beta_t\epsilon_t}_{\text{ 噪声项 }}\tag 2
因为 ϵ \epsilon ( 2 ) (2) 1 − α t . . . α 1 1-\alpha_t...\alpha_1
α t . . . α 1 + α t . . . α 2 β 1 + . . . + α t β t − 1 + β t = ( α 1 + β 1 ) α t . . . α 2 + . . . + α t β t − 1 + β t = α t + β t = 1 \begin{aligned} &\alpha_t...\alpha_1 + \alpha_t...\alpha_2\beta_1 + ...+ \alpha_t\beta_{t-1}+\beta_t \\ = & (\alpha_1+\beta_1)\alpha_t...\alpha_2 +...+ \alpha_t\beta_{t-1}+\beta_t \\ = &\alpha_{t}+\beta_t \\=&1 \end{aligned}
因此得出论文的前向扩散公式( 4 ) (4)
q ( x t ∣ x 0 ) = N ( x t ; α ˉ t x 0 , ( 1 − α ˉ t ) I ) , α ˉ t = ∏ T α t (4) q(x_t|x_0) =N (x_t; \sqrt {\bar \alpha_t} x_0, (1-\bar\alpha_t)I),\bar \alpha_t=\prod_T\alpha_t \tag 4
在该步骤中,β \beta [1e-4, 0.02] 之间,随着时间步 t 线性变换,这也极大的简化了训练时的优化目标推理。此外,DDPM 设置了 T=1000,在加噪 1000 步之后,图像就完全变成了无信号的电视画面。
在 ppdiffusor 中,公式 ( 4 ) (4) DDPMScheduler.add_noise()。
如果你参考了 DDPM 官方文档open in new window ,那么公式 ( 4 ) (4) q_sample() 函数。
Reverse process Reverse process 的目的是 能根据带有噪声的图片 x t x_{t} x t − 1 x_{t-1} p θ ( x t − 1 ∣ x t ) = N ( x t − 1 ; μ θ ( x t , t ) , Σ θ ( x t , t ) ) p_\theta(x_{t-1}|x_t) = N (x_{t-1}; \mu _\theta (x_t, t), \Sigma_\theta (x_t, t)) Σ θ ( x t , t ) = σ t 2 = β t \Sigma_\theta (x_t, t) = \sigma_t^2=\beta_t
首先我们能够通过 ( 4 ) (4) ( 15 ) (15)
x 0 = 1 α ˉ t ( x t − 1 − α ˉ t ϵ t ) (5) x_{0} = \frac 1{\sqrt {\bar \alpha_t}}(x_t-\sqrt{1-\bar\alpha_t}\epsilon_t) \tag 5
因此图像采样过程可以定义为 q ( x t − 1 ∣ x t ) = q ( x t − 1 ∣ x t , x 0 ) = N ( x t − 1 ; μ θ ( x t , x 0 ) , σ t I ) q(x_{t-1}|x_t)=q(x_{t-1}|x_t, x_0) = N (x_{t-1}; \mu _\theta (x_t, x_0), \sigma_t I) q ( x t − 1 ∣ x t , x 0 ) q(x_{t-1}|x_t, x_0)
q ( x t − 1 ∣ x t , x 0 ) = exp ( − 1 2 ( ( α t β t + 1 1 − α ˉ t − 1 ) x t − 1 2 − ( 2 α t β t x t + 2 α ˉ t − 1 1 − α ˉ t − 1 x 0 ) x t − 1 + C ( x t , x 0 ) ) ) (6) \begin{aligned} &q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) =\\ &\exp \left(-\frac{1}{2}\left(\left(\frac{\alpha_t}{\beta_t} + \frac{1}{1-\bar{\alpha}_{t-1}}\right) \mathbf{x}_{t-1}^2-\left(\frac{2 \sqrt{\alpha_t}}{\beta_t} \mathbf{x}_t+\frac{2 \sqrt{\bar{\alpha}_{t-1}}}{1-\bar{\alpha}_{t-1}} \mathbf{x}_0\right) \mathbf{x}_{t-1} + C\left(\mathbf{x}_t, \mathbf{x}_0\right)\right)\right) \end{aligned} \tag 6
公式推导 公式推导 q ( x t − 1 ∣ x t , x 0 ) = q ( x t ∣ x t − 1 , x 0 ) q ( x t − 1 ∣ x 0 ) q ( x t ∣ x 0 ) ∝ exp ( − 1 2 ( ( x t − α t x t − 1 ) 2 β t + ( x t − 1 − α ˉ t − 1 x 0 ) 2 1 − α ˉ t − 1 − ( x t − α ˉ t x 0 ) 2 1 − α ˉ t ) ) = exp ( − 1 2 ( x t 2 − 2 α t x t x t − 1 + α t x t − 1 2 β t + x t − 1 2 − 2 α ˉ t − 1 x 0 x t − 1 + α ˉ t − 1 x 0 2 1 − α ˉ t − 1 − ( x t − α ˉ t x 0 ) 2 1 − α ˉ t ) ) = exp ( − 1 2 ( ( α t β t + 1 1 − α ˉ t − 1 ) x t − 1 2 − ( 2 α t β t x t + 2 α ˉ t − 1 1 − α ˉ t − 1 x 0 ) x t − 1 + C ( x t , x 0 ) ) ) \begin{aligned} q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) &=q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}, \mathbf{x}_0\right) \frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_0\right)}{q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)} \\ & \propto \exp \left(-\frac{1}{2}\left(\frac{\left(\mathbf{x}_t-\sqrt{\alpha_t} \mathbf{x}_{t-1}\right)^2}{\beta_t}+\frac{\left(\mathbf{x}_{t-1}-\sqrt{\bar{\alpha}_{t-1}} \mathbf{x}_0\right)^2}{1-\bar{\alpha}_{t-1}}-\frac{\left(\mathbf{x}_t-\sqrt{\bar{\alpha}_t} \mathbf{x}_0\right)^2}{1-\bar{\alpha}_t}\right)\right) \\ &=\exp \left(-\frac{1}{2}\left(\frac{\mathbf{x}_t^2-2 \sqrt{\alpha_t} \mathbf{x}_t \mathbf{x}_{t-1}+\alpha_t \mathbf{x}_{t-1}^2}{\beta_t}+\frac{\mathbf{x}_{t-1}^2-2 \sqrt{\bar{\alpha}_{t-1}} \mathbf{x}_0 \mathbf{x}_{t-1}+\bar{\alpha}_{t-1} \mathbf{x}_0^2}{1-\bar{\alpha}_{t-1}}-\frac{\left(\mathbf{x}_t-\sqrt{\bar{\alpha}_t} \mathbf{x}_0\right)^2}{1-\bar{\alpha}_t}\right)\right) \\ &=\exp \left(-\frac{1}{2}\left(\left(\frac{\alpha_t}{\beta_t}+\frac{1}{1-\bar{\alpha}_{t-1}}\right) \mathbf{x}_{t-1}^2-\left(\frac{2 \sqrt{\alpha_t}}{\beta_t} \mathbf{x}_t+\frac{2 \sqrt{\bar{\alpha}_{t-1}}}{1-\bar{\alpha}_{t-1}} \mathbf{x}_0\right) \mathbf{x}_{t-1}+C\left(\mathbf{x}_t, \mathbf{x}_0\right)\right)\right) \end{aligned}
把上式对应到正态分布公式当中,可以得到论文中的公式 ( 7 ) (7)
σ t 2 = β ~ t = 1 − α ˉ t − 1 1 − α ˉ t ⋅ β t μ ~ t ( x t , x 0 ) = α t ( 1 − α ˉ t − 1 ) 1 − α ˉ t x t + α ˉ t − 1 β t 1 − α ˉ t x 0 (7) \begin{aligned} \sigma_t^2=\tilde{\beta}_t &=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \cdot \beta_t \\ \tilde{\boldsymbol{\mu}}_t\left(\mathbf{x}_t, \mathbf{x}_0\right) &= \frac{\sqrt{\alpha_t}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_t}{1-\bar{\alpha}_t} \mathbf{x}_0 \end{aligned} \tag 7
公式推导 σ t 2 = β ~ t = 1 / ( α t β t + 1 1 − α ˉ t − 1 ) = 1 / ( α t − α ˉ t + β t β t ( 1 − α ˉ t − 1 ) ) = 1 − α ˉ t − 1 1 − α ˉ t ⋅ β t μ ~ t ( x t , x 0 ) = ( α t β t x t + α ˉ t − 1 1 − α ˉ t − 1 x 0 ) / ( α t β t + 1 1 − α ˉ t − 1 ) = ( α t β t x t + α ˉ t − 1 1 − α ˉ t − 1 x 0 ) 1 − α ˉ t − 1 1 − α ˉ t ⋅ β t = α t ( 1 − α ˉ t − 1 ) 1 − α ˉ t x t + α ˉ t − 1 β t 1 − α ˉ t x 0 \begin{aligned} \sigma_t^2=\tilde{\beta}_t &=1 /\left(\frac{\alpha_t}{\beta_t}+\frac{1}{1-\bar{\alpha}_{t-1}}\right)\\&=1 /\left(\frac{\alpha_t-\bar{\alpha}_t+\beta_t}{\beta_t\left(1-\bar{\alpha}_{t-1}\right)}\right)\\&=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \cdot \beta_t \\ \tilde{\boldsymbol{\mu}}_t\left(\mathbf{x}_t, \mathbf{x}_0\right) &=\left(\frac{\sqrt{\alpha_t}}{\beta_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}}}{1-\bar{\alpha}_{t-1}} \mathbf{x}_0\right) /\left(\frac{\alpha_t}{\beta_t}+\frac{1}{1-\bar{\alpha}_{t-1}}\right) \\ &=\left(\frac{\sqrt{\alpha_t}}{\beta_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}}}{1-\bar{\alpha}_{t-1}} \mathbf{x}_0\right) \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \cdot \beta_t \\ &=\frac{\sqrt{\alpha_t}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_t}{1-\bar{\alpha}_t} \mathbf{x}_0 \end{aligned}
由于在采样过程中我们不知道真实的 x 0 x_0 x t x_t x 0 x_0 ( 5 ) (5)
x ^ t − 1 = 1 α t ( x t − β t 1 − α ˉ t ϵ θ ( x t , t ) ) + σ t z where z = N ( 0 , I ) (8) \begin{aligned} \hat x_{t-1} &=\frac 1{\sqrt { \alpha_t}}(x_t-\frac{\beta_t}{\sqrt{1-\bar\alpha_t}}\epsilon_\theta(x_t,t)) + \sigma_t z\\ &\text{where }z=N(0,I) \end{aligned}\tag 8
公式推导 x ^ t − 1 = μ θ ( x t , x 0 ) + σ t z = α t ( 1 − α ˉ t − 1 ) 1 − α ˉ t x t + α ˉ t − 1 β t 1 − α ˉ t x 0 + 1 − α ˉ t − 1 1 − α ˉ t β t ⋅ z = α t ( 1 − α ˉ t − 1 ) 1 − α ˉ t x t + α ˉ t − 1 β t 1 − α ˉ t ( α ˉ t ( x t − 1 − α ˉ t ϵ θ ) ) + 1 − α ˉ t − 1 1 − α ˉ t β t ⋅ z = 1 α t x t ( β t + α t − α ˉ t 1 − α ˉ t ) + β t α t 1 − α ˉ t ϵ θ + 1 − α ˉ t − 1 1 − α ˉ t β t ⋅ z = 1 α t ( x t − β t 1 − α ˉ t ϵ θ ( x t , t ) ) + σ t z where z = N ( 0 , I ) \begin{aligned} \hat x_{t-1} &= \mu_\theta(x_t,x_0) + \sigma_tz\\ &= \frac{\sqrt{\alpha_t}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_t}{1-\bar{\alpha}_t} \mathbf{x}_0 + \sqrt { \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \beta_t}·z\\ &=\frac{\sqrt{\alpha_t}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_t} \mathbf{x}_t +\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_t}{1-\bar{\alpha}_t}(\frac {\sqrt {\bar \alpha_t}}(x_t-\sqrt{1-\bar\alpha_t}\epsilon_\theta) )+\sqrt{\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \beta_t}·z\\ &= \frac 1 {\sqrt \alpha _t}x_t\left( \frac{\beta_t+\alpha_t-\bar\alpha_t}{1-\bar \alpha_t} \right) + \frac {\beta_t}{\sqrt \alpha_t\sqrt {1-\bar\alpha_t}}\epsilon_\theta + \sqrt{\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t}\beta_t}\cdot z\\ &=\frac 1{\sqrt { \alpha_t}}(x_t-\frac{\beta_t}{\sqrt{1-\bar\alpha_t}}\epsilon_\theta(x_t,t)) + \sigma_t z\\ &\text{where }z=N(0,I) \end{aligned}
Reverse process 该部分对应的为 ppdiffusor.DDPMScheduler.step。DDPM 论文提供的 Tensorflow 版代码链接为 linkopen in new window 。
上文公式 (5) 在官方代码中对应 predict_start_from_noise,在 paddle 中对应 ppdiffusor.DDPMScheduler.step 的 pred_original_sample = (sample - beta_prod_t**(0.5) * model_output) / alpha_prod_t**(0.5)
上文公式 ( 7 ) (7) q_posterior_mean_variance,在 ppdiffusor.DDPMScheduler.step 对应。 pred_prev_sample = pred_original_sample_coeff * pred_original_sample + current_sample_coeff * sample
细心的朋友们会发现官方给的代码中,sampling 方式分为:
x t → m o d e l ϵ θ ( x t , t ) → 公式 ( 5 ) x ^ 0 ( x t , ϵ θ ) → 公式 ( 7 ) μ ( x t , x ^ 0 ) , β t → s a m p l i n g x t − 1 x_t\xrightarrow{model} \epsilon_\theta(x_t,t) \xrightarrow {\text{ 公式 }(5)}\hat x_0(x_t, \epsilon_\theta) \xrightarrow {\text{ 公式 }(7)}\mu(x_t, \hat x_0),\beta_t\xrightarrow{sampling}x_{t-1}
但其实这等价于:
x t → 公式 ( 8 ) x t − 1 x_t\xrightarrow{\text{ 公式 } (8)} x_{t-1}
上文公式 ( 8 ) (8) ( 5 ) , ( 7 ) (5),(7) ppdiffusor.DDPMScheduler.step 中将采样过程全部替换为:
prev_sample = (sample - model_output * self.betas[t]/(1-self.alphas_cumprod[t]) **0.5)/self.alphas[t]** (
0.5) + variance
那么结果会是一样的,我们将在之后的代码探索中尝试验证它。
优化目标 在训练过程中,我们只需要对每个 t t ϵ θ \epsilon_\theta ϵ θ \epsilon_\theta pred_noise 参数,用于选择模型的预测目标为噪声 ϵ θ \epsilon_\theta x t − 1 x_{t-1}
从论文的变分边界角度出发 我们的目标是获得 x x
E [ − log p θ ( x 0 ) ] ≤ E [ − log p θ ( x T ) − ∑ t ≥ 1 log p θ ( x t − 1 ∣ x t ) q ( x t ∣ x t − 1 ) ] = L V L B (11) \begin{aligned} \mathbb E[-\log p_\theta(x_0)] \le \mathbb E \left[-\log p_\theta(x_T) - \sum_{t\ge1}\log\frac{p_\theta(x_{t-1}|x_t)}{q(x_t|x_{t-1})} \right] =L_{VLB} \end{aligned}\tag{11}
公式推导 E [ − log p θ ( x 0 ) ] = E [ − log p θ ( x 0 ) ∫ p θ ( x 1 : T ) d x 1 : T ] = E [ − log ∫ p θ ( x 0 : T ) d x 1 : T ] = E [ − log ∫ p θ ( x 0 : T ) q ( x 1 : T ∣ x 0 ) q ( x 1 : T ∣ x 0 ) d x 1 : T ] ≤ E [ − log p θ ( x 0 : T ) ∫ q ( x 1 : T ∣ x 0 ) q ( x 1 : T ∣ x 0 ) d x 1 : T ] = E [ − log p θ ( x 0 : T ) q ( x 1 : T ∣ x 0 ) ] = E [ − log p θ ( x T ) − ∑ t ≥ 1 log p θ ( x t − 1 ∣ x t ) q ( x t ∣ x t − 1 ) ] = L V L B \begin{aligned} \mathbb E[-\log p_\theta(x_0)] &= \mathbb E\left[-\log p_\theta(x_0) \int p_\theta(x_{1:T})dx_{1:T}\right] \\ &= \mathbb E \left[-\log \int p_\theta(x_{0:T})dx_{1:T}\right]\\ &= \mathbb E\left[-\log \int \frac {p_\theta(x_{0:T})}{q(x_{1:T}|x_0)}q(x_{1:T}|x_0)dx_{1:T} \right ] \\ &\le \mathbb E\left[- \log\frac{p_{\theta(x_{0:T})}}{\int q(x_{1:T}|x_0)q(x_{1:T}|x_0)dx_{1:T}}\right] \\ &=\mathbb E\left[-\log \frac {p_\theta(x_{0:T})}{q(x_{1:T}|x_0)} \right] \\ &= \mathbb E \left[-\log p_\theta(x_T) - \sum_{t\ge1}\log\frac{p_\theta(x_{t-1}|x_t)}{q(x_t|x_{t-1})} \right] =L_{VLB} \end{aligned}
因此我们得到了论文中的公式 ( 3 ) (3)
L V L B = E q [ D K L ( q ( x T ∣ x 0 ) ∥ p ( x T ) ) ⏟ L T + ∑ t > 1 D K L ( q ( x t − 1 ∣ x t , x 0 ) ∥ p θ ( x t − 1 ∣ x t ) ) ⏟ L t − 1 − log p θ ( x 0 ∣ x 1 ) ⏟ L 0 ] (12) \begin{aligned} L_{VLB}&= \mathbb{E}_q\left[\underbrace{D_{\mathrm{KL}}\left(q\left(\mathbf{x}_T \mid \mathbf{x}_0\right) \| p\left(\mathbf{x}_T\right)\right)}_{L_T}+\sum_{t>1} \underbrace{D_{\mathrm{KL}}\left(q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)\right)}_{L_{t-1}} \underbrace{-\log p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}_{L_0}\right] \end{aligned}\tag {12}
公式推导 L V L B = E q [ − log p θ ( x T ) + ∑ t = 2 T log q ( x t ∣ x t − 1 ) p θ ( x t − 1 ∣ x t ) + log q ( x 1 ∣ x 0 ) p θ ( x 0 ∣ x 1 ) ] = E q [ − log p θ ( x T ) + ∑ t = 2 T log ( q ( x t − 1 ∣ x t , x 0 ) p θ ( x t − 1 ∣ x t ) ⋅ q ( x t ∣ x 0 ) q ( x t − 1 ∣ x 0 ) ) + log q ( x 1 ∣ x 0 ) p θ ( x 0 ∣ x 1 ) ] = E q [ − log p θ ( x T ) + ∑ t = 2 T log q ( x t − 1 ∣ x t , x 0 ) p θ ( x t − 1 ∣ x t ) + ∑ t = 2 T log q ( x t ∣ x 0 ) q ( x t − 1 ∣ x 0 ) + log q ( x 1 ∣ x 0 ) p θ ( x 0 ∣ x 1 ) ] = E q [ − log p θ ( x T ) + ∑ t = 2 T log q ( x t − 1 ∣ x t , x 0 ) p θ ( x t − 1 ∣ x t ) + log q ( x T ∣ x 0 ) q ( x 1 ∣ x 0 ) + log q ( x 1 ∣ x 0 ) p θ ( x 0 ∣ x 1 ) ] = E q [ log q ( x T ∣ x 0 ) p θ ( x T ) + ∑ t = 2 T log q ( x t − 1 ∣ x t , x 0 ) p θ ( x t − 1 ∣ x t ) − log p θ ( x 0 ∣ x 1 ) ] = E q [ D K L ( q ( x T ∣ x 0 ) ∥ p ( x T ) ) ⏟ L T + ∑ t > 1 D K L ( q ( x t − 1 ∣ x t , x 0 ) ∥ p θ ( x t − 1 ∣ x t ) ) ⏟ L t − 1 − log p θ ( x 0 ∣ x 1 ) ⏟ L 0 ] \begin{aligned} L_{VLB}&=\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}+\log \frac{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}\right] \\ &=\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=2}^T \log \left(\frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)} \cdot \frac{q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)}{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_0\right)}\right)+\log \frac{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}\right] \\ &=\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)}{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_0\right)}+\log \frac{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}\right] \\ &=\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}+\log \frac{q\left(\mathbf{x}_T \mid \mathbf{x}_0\right)}{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}+\log \frac{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}\right] \\ &=\mathbb{E}_q\left[\log \frac{q\left(\mathbf{x}_T \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_T\right)}+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}-\log p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)\right]\\ &= \mathbb{E}_q\left[\underbrace{D_{\mathrm{KL}}\left(q\left(\mathbf{x}_T \mid \mathbf{x}_0\right) \| p\left(\mathbf{x}_T\right)\right)}_{L_T}+\sum_{t>1} \underbrace{D_{\mathrm{KL}}\left(q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)\right)}_{L_{t-1}} \underbrace{-\log p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}_{L_0}\right] \end{aligned}
因此我们得到了论文中的公式 ( 5 ) (5) L T L_T L 0 L_0 L t − 1 L_{t-1} q ( x t − 1 ∣ x t , x 0 ) q(x_{t-1}|x_t,x_0) p θ ( x t − 1 ∣ x t ) p_\theta(x_{t-1}|x_t)
K L ( N ( μ 1 , σ 1 2 ) ∥ N ( μ 2 , σ 2 2 ) ) = log σ 2 σ 1 − 1 2 + σ 1 2 + ( μ 1 − μ 2 ) 2 2 σ 2 2 (13) \begin{aligned} K L\left(\mathcal{N}\left(\mu_{1}, \sigma_{1}^{2}\right) \| \mathcal{N}\left(\mu_{2}, \sigma_{2}^{2}\right)\right) &=\log \frac{\sigma_{2}}{\sigma_{1}}-\frac{1}{2}+\frac{\sigma_{1}^{2}+\left(\mu_{1}-\mu_{2}\right)^{2}}{2 \sigma_{2}^{2}} \end{aligned}\tag{13}
公式推导 K L ( N ( μ 1 , σ 1 2 ) ∥ N ( μ 2 , σ 2 2 ) ) = ∫ x 1 2 π σ 1 e − ( x − μ 1 ) 2 2 σ 1 2 log 1 2 π σ 1 e − ( x − μ 1 ) 2 2 σ 1 2 1 2 π σ 2 e − ( x − μ 2 ) 2 2 σ 2 2 d x = ∫ x 1 2 π σ 1 e − ( x − μ 1 ) 2 2 σ 1 2 [ log σ 2 σ 1 − ( x − μ 1 ) 2 2 σ 1 2 + ( x − μ 2 ) 2 2 σ 2 2 ] d x = log σ 2 σ 1 − 1 2 + σ 1 2 + ( μ 1 − μ 2 ) 2 2 σ 2 2 (13) \begin{aligned} K L\left(\mathcal{N}\left(\mu_{1}, \sigma_{1}^{2}\right) \| \mathcal{N}\left(\mu_{2}, \sigma_{2}^{2}\right)\right) &=\int_{x} \frac{1}{\sqrt{2 \pi} \sigma_{1}} e^{-\frac{\left(x-\mu_{1}\right)^{2}}{2 \sigma_{1}^{2}}} \log \frac{\frac{1}{\sqrt{2 \pi} \sigma_{1}} e^{-\frac{\left(x-\mu_{1}\right)^{2}}{2 \sigma_{1}^{2}}}}{\frac{1}{\sqrt{2 \pi} \sigma_{2}} e^{-\frac{\left(x-\mu_{2}\right)^{2}}{2 \sigma_{2}^{2}}}} d x \\ &=\int_{x} \frac{1}{\sqrt{2 \pi} \sigma_{1}} e^{-\frac{\left(x-\mu_{1}\right)^{2}}{2 \sigma_{1}^{2}}}\left[\log \frac{\sigma_{2}}{\sigma_{1}}-\frac{\left(x-\mu_{1}\right)^{2}}{2 \sigma_{1}^{2}}+\frac{\left(x-\mu_{2}\right)^{2}}{2 \sigma_{2}^{2}}\right] d x \\&=\log \frac{\sigma_{2}}{\sigma_{1}}-\frac{1}{2}+\frac{\sigma_{1}^{2}+\left(\mu_{1}-\mu_{2}\right)^{2}}{2 \sigma_{2}^{2}} \end{aligned}\tag{13}
其中
log σ 2 σ 1 ∫ x 1 2 π σ 1 e − ( x − μ 1 ) 2 2 σ 1 2 d x = log σ 2 σ 1 − 1 2 σ 1 2 ∫ x ( x − μ 1 ) 2 1 2 π σ 1 e − ( x − μ 1 ) 2 2 σ 1 2 d x = − 1 2 σ 1 2 σ 1 2 = − 1 2 1 2 σ 2 2 ∫ x ( x − μ 2 ) 2 1 2 π σ 1 e − ( x − μ 1 ) 2 2 σ 1 2 d x = 1 2 σ 2 2 ∫ x ( x 2 − 2 μ 2 x + μ 2 2 ) 1 2 π σ 1 e − ( x − μ 1 ) 2 2 σ 1 2 d x = σ 1 2 + μ 1 2 − 2 μ 1 μ 2 + μ 2 2 2 σ 2 2 = σ 1 2 + ( μ 1 − μ 2 ) 2 2 σ 2 2 (14) \begin{aligned}\log \frac{\sigma_{2}}{\sigma_{1}} \int_{x} \frac{1}{\sqrt{2 \pi} \sigma_{1}} e^{-\frac{\left(x-\mu_{1}\right)^{2}}{2 \sigma_{1}^{2}}} d x &=\log \frac{\sigma_{2}}{\sigma_{1}}\\ -\frac{1}{2 \sigma_{1}^{2}} \int_{x}\left(x-\mu_{1}\right)^{2} \frac{1}{\sqrt{2 \pi} \sigma_{1}} e^{-\frac{\left(x-\mu_{1}\right)^{2}}{2 \sigma_{1}^{2}}} d x&=-\frac{1}{2 \sigma_{1}^{2}} \sigma_{1}^{2}=-\frac{1}{2} \\ \frac{1}{2 \sigma_{2}^{2}} \int_{x}\left(x-\mu_{2}\right)^{2} \frac{1}{\sqrt{2 \pi} \sigma_{1}} e^{-\frac{\left(x-\mu_{1}\right)^{2}}{2 \sigma_{1}^{2}}} d x &=\frac{1}{2 \sigma_{2}^{2}} \int_{x}\left(x^{2}-2 \mu_{2} x+\mu_{2}^{2}\right) \frac{1}{\sqrt{2 \pi} \sigma_{1}} e^{-\frac{\left(x-\mu_{1}\right)^{2}}{2 \sigma_{1}^{2}}} d x\\ &=\frac{\sigma_{1}^{2}+\mu_{1}^{2}-2 \mu_{1} \mu_{2}+\mu_{2}^{2}}{2 \sigma_{2}^{2}}=\frac{\sigma_{1}^{2}+\left(\mu_{1}-\mu_{2}\right)^{2}}{2 \sigma_{2}^{2}} \end{aligned}\tag{14}
因此:
L t − 1 = D K L ( q ( x t − 1 ∣ x t , x 0 ) ∥ p θ ( x t − 1 ∣ x t ) ) = D K L ( N ( x t − 1 ; μ ~ ( x t , x 0 ) , σ t 2 I ) ∥ N ( x t − 1 ; μ θ ( x t , t ) , σ t 2 I ) ) = 1 2 σ t 2 ∥ μ ~ t ( x t , x 0 ) − μ θ ( x t , t ) ∥ 2 + C (15) \begin{aligned} L_{t-1} &= D_{\mathrm{KL}}\left(q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)\right) \\&=D_{\mathrm{KL}}\left(\mathcal{N}\left(\mathbf{x}_{t-1} ; \tilde{\boldsymbol{\mu}}\left(\mathbf{x}_t, \mathbf{x}_0\right), \sigma_t^2 \mathbf{I}\right) \| \mathcal{N}\left(\mathbf{x}_{t-1} ; \boldsymbol{\mu}_\theta\left(\mathbf{x}_t, t\right), \sigma_t^2 \mathbf{I}\right)\right) \\ &=\frac{1}{2 \sigma_t^2}\left\|\tilde{\boldsymbol{\mu}}_t\left(\mathbf{x}_t, \mathbf{x}_0\right)-\boldsymbol{\mu}_\theta\left(\mathbf{x}_t, t\right)\right\|^2 + C \end{aligned}\tag{15}
所以我们得到了论文中的公式 ( 8 ) (8)
由于我们在前面假设了 q ( x t − 1 ∣ x t , x 0 ) q(x_{t-1}|x_t,x_0) p θ ( x t − 1 ∣ x t ) p_\theta(x_{t-1}|x_t) C = 0 C=0 ( 5 ) (5)
L t = E [ ( 1 − α t ) 2 2 α t ( 1 − α ˉ t ) σ 2 ∥ ϵ t − ϵ θ ( α ˉ t x 0 + 1 − α ˉ t ϵ t , t ) ∥ 2 ] (16) \begin{aligned} L_t &=\mathbb{E}\left[\frac{\left(1-\alpha_t\right)^2}{2 \alpha_t\left(1-\bar{\alpha}_t\right)\sigma^2}\left\|\boldsymbol{\epsilon}_t-\boldsymbol{\epsilon}_\theta\left(\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}_t, t\right)\right\|^2\right] \end{aligned}\tag {16}
公式推导 L t = E [ 1 2 σ 2 ∥ μ ~ t ( x t , x 0 ) − μ θ ( x t , t ) ∥ 2 ] = E [ 1 2 σ 2 ∥ 1 α t ( x t − 1 − α t 1 − α ˉ t ϵ t ) − 1 α t ( x t − 1 − α t 1 − α ˉ t ϵ θ ( x t , t ) ) ∥ 2 ] = E [ ( 1 − α t ) 2 2 α t ( 1 − α ˉ t ) σ 2 ∥ ϵ t − ϵ θ ( x t , t ) ∥ 2 ] = E [ ( 1 − α t ) 2 2 α t ( 1 − α ˉ t ) σ 2 ∥ ϵ t − ϵ θ ( α ˉ t x 0 + 1 − α ˉ t ϵ t , t ) ∥ 2 ] (16) \begin{aligned} L_t &=\mathbb{E}\left[\frac{1}{2\sigma^2}\left\|\tilde{\boldsymbol{\mu}}_t\left(\mathbf{x}_t, \mathbf{x}_0\right)-\boldsymbol{\mu}_\theta\left(\mathbf{x}_t, t\right)\right\|^2\right] \\ &=\mathbb{E}\left[\frac{1}{2\sigma^2}\left\|\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_t\right)-\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)\right)\right\|^2\right] \\ &=\mathbb{E}\left[\frac{\left(1-\alpha_t\right)^2}{2 \alpha_t\left(1-\bar{\alpha}_t\right)\sigma^2}\left\|\boldsymbol{\epsilon}_t-\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)\right\|^2\right] \\ &=\mathbb{E}\left[\frac{\left(1-\alpha_t\right)^2}{2 \alpha_t\left(1-\bar{\alpha}_t\right)\sigma^2}\left\|\boldsymbol{\epsilon}_t-\boldsymbol{\epsilon}_\theta\left(\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}_t, t\right)\right\|^2\right] \end{aligned}\tag {16}
因此我们得到了论文中的公式 ( 12 ) (12) ϵ \epsilon ( 12 ) (12)
从优化像素的角度出发 生成扩散模型漫谈(一):DDPM = 拆楼 + 建楼open in new window 从优化像素的角度出发进行了推理,得到了与论文相似的优化函数形式。
大致思路是直接对图像进行优化:
L = ∣ ∣ x t − 1 − x ^ t − 1 ∣ ∣ 2 (9) L = ||x_{t-1} - \hat x_{t-1}||^2\tag 9
由于在预测时候我们不知道原先噪声,因此使用预测的噪声 ϵ θ \epsilon_\theta x ^ t − 1 = 1 α t ( x t − 1 − α ϵ θ ( x t , t ) ) \hat x_{t-1} = \frac 1{\sqrt {\alpha_t}}(x_t-\sqrt{1-\alpha}\epsilon_\theta(x_t,t)) ( 9 ) (9)
L = ∣ ∣ 1 α t ( x t − 1 − α t ϵ ) − 1 α t ( x t − 1 − α t ϵ θ ( x t , t ) ) ∣ ∣ 2 = 1 − α t α t ∣ ∣ ϵ t − ϵ θ ( x t , t ) ∣ ∣ 2 = 1 − α t α t ∣ ∣ ϵ t − ϵ θ ( α t x 0 + 1 − α t ϵ t , t ) ∣ ∣ 2 (10) \begin{aligned} L &= ||\frac 1{\sqrt {\alpha_t}}(x_t-\sqrt{1-\alpha_t}\epsilon) - \frac 1{\sqrt { \alpha_t}}(x_t-\sqrt{1-\alpha_t}\epsilon_\theta(x_t, t))||^2\\ &= \frac {1-\alpha_t}{\alpha_t}||\epsilon_t - \epsilon_\theta(x_t, t) ||^2\\ &= \frac {1-\alpha_t}{\alpha_t}||\epsilon_t - \epsilon_\theta\left(\sqrt{\alpha_t} \mathbf{x}_0+\sqrt{1-{\alpha}_t} \boldsymbol{\epsilon}_t, t\right) ||^2 \end{aligned}\tag {10}
当然以上只是进行了大致流程概括,实际推理过程还需要考虑方差过大等细节问题,详细请参考 生成扩散模型漫谈(一):DDPM = 拆楼 + 建楼open in new window 。
模型优化过程 根据上述的公式,我们只需要建立模型,对噪声进行拟合即可。以下伪代码参考了 DDPM 论文提供的代码,展示 DDPM 优化过程逻辑:
def train_losses(self, model, x_start, t):
noise = torch.randn_like(x_start)
x_noisy = self.q_sample(x_start, t, noise=noise)
predicted_noise = model(x_noisy, t)
loss = F.mse_loss(noise, predicted_noise)
# 部分网友提到此处使用 mse 可能导致 loss 太小,在低精度训练情况下,模型先收敛后发散
return loss
DDPM 论文中采用的 model 为 UNET(并做了一些优化配置),我们不展开讨论。其中 t t
for epoch in range(epochs):
for step, (images, labels) in enumerate(train_loader):
optimizer.zero_grad()
batch_size = images.shape[0]
images = images.to(device)
# sample t uniformally for every example in the batch
t = torch.randint(0, timesteps, (batch_size,), device=device).long()
loss = gaussian_diffusion.train_losses(model, images, t)
if step % 200 == 0:
print("Loss:", loss.item())
loss.backward()
optimizer.step()
探索与思考 为什么 DDPM 效果更好?
笔者猜想是否因为优化目标从图片像素便到了噪声,优化目标变小,更好拟合了??此外,DDPM 相比于单步的 VAE 效果更好,可能因为:
VAE 同样假设建模对象符合正态分布,对于微小变化来说,可以用正态分布足够近似地建模,类似于曲线在小范围内可以用直线近似,多步分解就有点像用分段线性函数拟合复杂曲线,因此理论上可以突破传统单步 VAE 的拟合能力限制。 -- 引用来源 生成扩散模型漫谈(二):DDPM = 自回归式 VAEopen in new window
代码(torch 版本) 参考代码 TF-DDPMopen in new window torch-DDPM open in new window :
其中函数分别以及对应的公式:
q_sample 对应本文公式 ( 4 ) (4) x t = α ˉ t x 0 + 1 − α ˉ t ϵ x_t = \sqrt {\bar\alpha_t} x_0 + \sqrt {1 - \bar\alpha_t} \epsilon predict_start_from_noise 对应本文公式 ( 5 ) (5) x 0 = 1 α ˉ t ( x t − 1 − α ˉ t ϵ ) x_{0} = \frac 1{\sqrt {\bar \alpha_t}}(x_t-\sqrt{1-\bar\alpha_t}\epsilon) q_posterior_mean_variance 对应本文公式 ( 7 ) (7) β ~ t = 1 − α ˉ t − 1 1 − α ˉ t ⋅ β t μ t ( x t , x 0 ) = α ^ t − 1 β 1 − α ^ t x 0 + α t ( 1 − α ^ t − 1 ) 1 − α ^ t x t \begin{aligned} \tilde{\beta}_t &=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \cdot \beta_t\\ \mu _t(x_t, x_0) &= \frac{\sqrt {\hat\alpha_{t-1}}\beta }{1-\hat\alpha_t}x_0 + \frac {\sqrt \alpha_t (1-\hat\alpha_{t-1})}{1-\hat\alpha_t}x_t \end{aligned}
p_mean_variance 对应本文公式 ( 5 ) + ( 7 ) (5)+(7) p_sample 对应 p_mean_variance + 本文公式 ( 8 ) (8) 细心的朋友们会发现官方给的代码中,sampling 方式分为:
x t → m o d e l ϵ θ ( x t , t ) → 公式 ( 5 ) x ^ 0 ( x t , ϵ θ ) → 公式 ( 7 ) μ ( x t , x ^ 0 ) , β t → s a m p l i n g x t − 1 x_t\xrightarrow{model} \epsilon_\theta(x_t,t) \xrightarrow {\text{ 公式 }(5)}\hat x_0(x_t, \epsilon_\theta) \xrightarrow {\text{ 公式 }(7)}\mu(x_t, \hat x_0),\beta_t\xrightarrow{sampling}x_{t-1}
但其实这等价于:
x t → 公式 ( 8 ) x t − 1 x_t\xrightarrow{\text{ 公式 } (8)} x_{t-1}
经过测试,将 p_sample 部分的代码换成上面这个公式后,采样生成图片的结果是一样的。
模型方面 DDPM 采用了 UNET 作为 backbone,在传播过程中加入了三角函数位置编码,用于传递采样步骤 t t [-1, 1] 的区间进行模型学习,在预测编码的时候映射回到 [0, 255]。
此外论文中的 UNET 还加入了 attention 等操作,能够提高打榜分数,但如果采用基础的自编码器效果也是够好的。
训练过程 根据官方的代码,优化时直接对噪声进行优化,即:
def train_losses(self, model, x_start, t):
noise = torch.randn_like(x_start)
x_noisy = self.q_sample(x_start, t, noise=noise)
predicted_noise = model(x_noisy, t)
loss = F.mse_loss(noise, predicted_noise)
# 部分网友提到此处使用 mse 可能导致 loss 太小,在低精度训练情况下,模型先收敛后发散
return loss
其中 t t
for epoch in range(epochs):
for step, (images, labels) in enumerate(train_loader):
optimizer.zero_grad()
batch_size = images.shape[0]
images = images.to(device)
# sample t uniformally for every example in the batch
t = torch.randint(0, timesteps, (batch_size,), device=device).long()
loss = gaussian_diffusion.train_losses(model, images, t)
if step % 200 == 0:
print("Loss:", loss.item())
loss.backward()
optimizer.step()
代码(ppdiffuser 版本) 查看采样过程中的渐变图片 我们需要在 DDPMScheduler.step 中,将 prev_sample 打印出来,首先运行一个图片采样过程:
import sys
sys.path.append("ppdiffusers")
sys.path.append("ppdiffusers/ppdiffusers")
from ppdiffusers import DDPMPipeline
# 加载模型和 scheduler
pipe = DDPMPipeline.from_pretrained("google/ddpm-celebahq-256")
pipe.scheduler.config.clip_sample =False
# 执行 pipeline 进行推理
output = pipe(seed=777)
images = output[0].images
image = images[0]
# 保存图片
all_images = output[1] # 保存了所有预测过程中的 x_t
all_x_0 = output[2] # 保存了所有预测过程中的 x_0,参考本文公式 5
image.show()
我们打印所有过程图片 x t x_t
from matplotlib import pyplot as plt
plt.figure(figsize=(10,5))
count = 0
for i in range(1,1000,50):
img = all_images[i][0].resize((64,64))
count += 1
plt.subplot(5,10,count)
plt.imshow(img)
plt.axis("off")
plt.show()
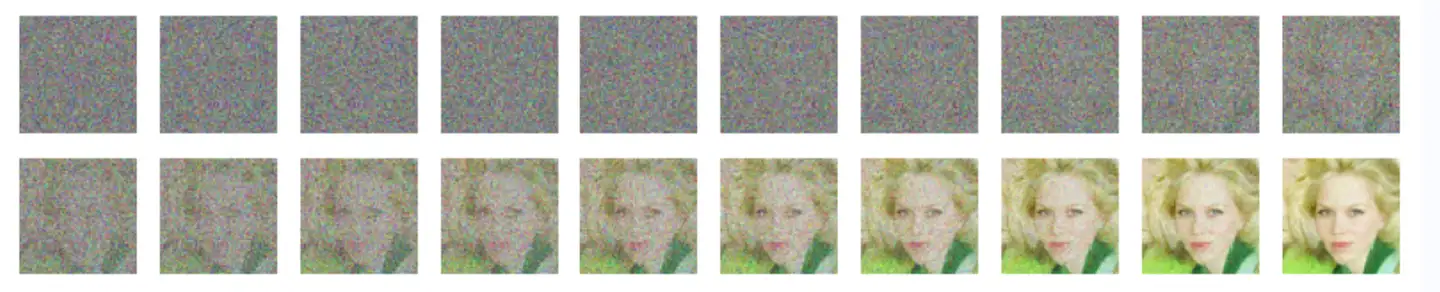
image-20230816225157005 接下来我们打印所有中间预测过的 x 0 x_0 ( 5 ) (5) x 0 x_0
plt.figure(figsize=(10,5))
count = 0
for i in range(1,1000,50):
img = all_x_0[i][0].resize((64,64))
count += 1
plt.subplot(5,10,count)
plt.imshow(img)
plt.axis("off")
plt.show()
image-20230816225220451 验证将
x t → m o d e l ϵ θ ( x t , t ) → 公式 ( 5 ) x ^ 0 ( x t , ϵ θ ) → 公式 ( 7 ) μ ( x t , x ^ 0 ) , β t → s a m p l i n g x t − 1 x_t\xrightarrow{model} \epsilon_\theta(x_t,t) \xrightarrow {\text{ 公式 }(5)}\hat x_0(x_t, \epsilon_\theta) \xrightarrow {\text{ 公式 }(7)}\mu(x_t, \hat x_0),\beta_t\xrightarrow{sampling}x_{t-1}
替换为:
x t → 公式 ( 8 ) x t − 1 x_t\xrightarrow{\text{ 公式 } (8)} x_{t-1}
后的结果(参考本文 Reverse process 部分)
将 ppdiffusers/ppdiffusers/schedulers/DDPMScheduler.step 中 pred_prev_sample 预测方式改为
pred_prev_sample = (sample - model_output * self.betas[t]/(1-self.alphas_cumprod[t]) **0.5)/self.alphas[t]** (
0.5) + variance
得出与原先相近的图片。由于采样过程中存在对预测的 x 0 x_0 DDPMScheduler 中的 config.clip_sample 参数)。因此两者在代码上来说,并不是完全等价的。这个影响在 DDIM (DENOISING DIFFUSION IMPLICIT MODELS)中会相对严重,笔者将在下一个笔记中一起来探讨 DDIM。
参考 科学空间 - 生成扩散模型漫谈系列博客open in new window
小小将 - 扩散模型之 DDPMopen in new window
DDPM 论文代码 TF 版open in new window
DDPM Torch 版open in new window
转载自 https://kevinng77.github.io/posts/notes/articles/%E7%AC%94%E8%AE%B0ddpm.html
标签: Diffusion ,
right ,
mathbf ,
代码 ,
frac ,
DDPM ,
alpha ,
xt ,
left
From: https://www.cnblogs.com/zhangxianrong/p/18326866