任务目标
- 扫描二维码
- 平面移动定位
- 拿取物料
- 色环定位
- 放置物料
比赛总体只有这么些执行要点,每个部分都需要重视,随着序号顺序其重要性降序!最重要的就是扫二维码和移动以及拿物料,一步步进行,才能得分,根据顺序执行,哪个部分寄掉,后面的环节大概率也要寄。
下面对每个环节所需要的主要器件选型做介绍和建议。
扫描二维码方案
这个环节即是最简单的,也是最重要的,也是绝对不能出问题的!一定要稳定!不能出问题!不能依靠运气,在长春国赛,初赛有不少强队因为这个寄了没进决赛,决赛也有不少队因为无法适应位置修改了的二维码板而寄了,这里扫不到数据,后面所有环节全完蛋!一分都没!
这里我分享两种思路:
1. 使用二维码扫描模块直接扫描。
就用这种淘宝几十块钱的二维码模块,以前都是用在超市收银机的,需要用一个串口驱动,这也是我们队国赛的方案。

优点:
- 方便
- 使用简单
- 只要在合适角度,扫描稳定
- 数据简单
- 扫描距离远
缺点
- 慢
- 扫描角度小
- 需要占用一个串口
- 必须要停下来扫描,行走扫描不一定能扫的到
我们队用这个,没在二维码上出过问题!(前提是车车要走到二维码板前)走到了,就能扫到,扫到了数据就有,而这个模块自带补光,可以通过指令开启扫描时补光。这里需要注意国赛初赛规则上写了,不准向场外补光,这里我也不知道向二维码板上补光算不算犯规,所以国赛的时候我用#define修改了扫描指令,没加补光,依然稳定。
2.使用K210或者openmv之类的摄像头模组

优点
- 可编程,可控性强
- 可视角度大,可以换镜头
- 识别速度快,可以跑着扫描
- 可扩展其他功能,不仅用来扫二维码
缺点
- 贵
- 可能会出问题,不稳定
- 需要自己写代码
- 其实没啥缺点
我们队三四月份的时候用的就是V831,有一说一,快!稳定性还行,但我听群里说有人国赛扫描摄像头的时候因为国赛场馆灯光问题,扫不到二维码,我的评价是,哥们没加补光以及代码没调太好可能是,二维码这玩意库那么多,我觉得应该蛮好操作的。
总结
使用啥都行,只要会用。我们队采用的是GM65-二维码扫描模块,稳定,容易更换,排错误,出问题,基本不会去查看该模块的问题。唯一的地方就是,在二维码识别那里,比别的队慢2s,因为我们车车需要停下来扫描。我建议,如果没有别的需求,还是采用GM65就行,如果对自己实力比较有信心,代码稳定,图快的话,可以采用V831或者树莓派。
补充,可以看一下下面两个场地的区别,如果是使用了机械臂上的摄像头功能复用扫描二维码(有的是两个摄像头),需要专门设计一个动作执行二维码扫描,而在决赛的时候,二维码位置变换,在另一侧:我们队是直接把GM65模块(双面胶粘的)拔下来,放在车车的另一侧,保证车车总体运行方向不变;如果用机械臂的话,要么重新设计一个动作,要么修改车车运行方向,决赛发布规则到准备时间结束一共只有五个小时,要对自己的能力有正确的认识。
平面移动方案
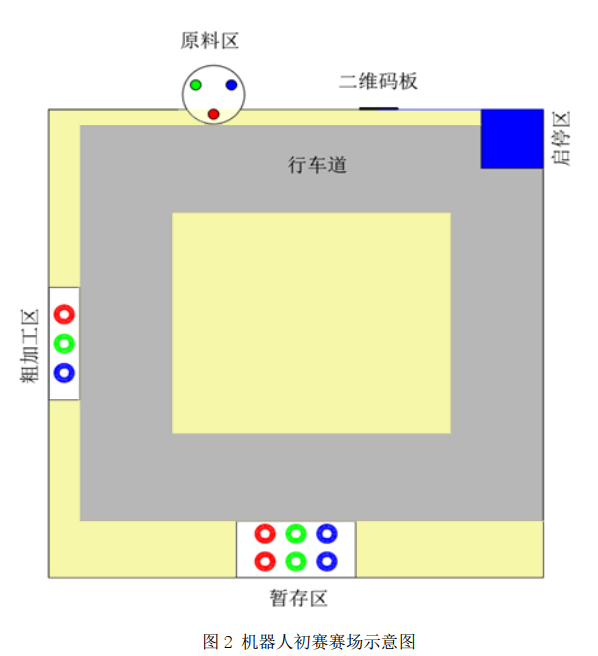
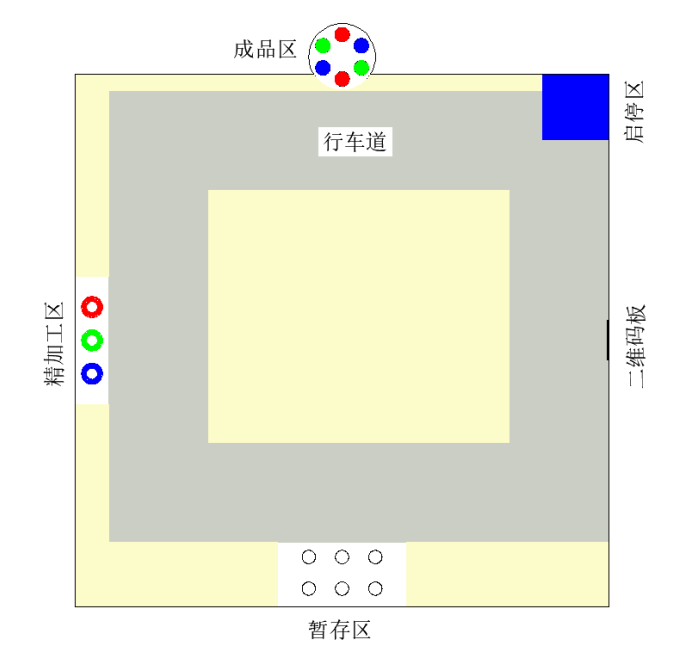
两个场地的运动方向是相反的,具体可以看规则————即在决赛需要在五个小时内写一套新的定位移动代码;
比赛场地是分很多个区域的,如果不能准确到达每个区域,就不能得分,甚至会因为碰到黄色区域导致比赛提前结束。
所以,在这个比赛中,电控选手最重要的任务之一就是平面移动和精确定位,车车跑得快,车车跑的准,才能算好。这里我们团队采用的思路是,底盘运动控制粗略定位,视觉识别精确定位。
这里主要分享底盘运动控制粗略定位的电机选型,轮子选型以及视觉识别精确定位的摄像头,板子选型。
底盘运动控制粗略定位
这里直接使用编码器记录车车行走的距离,配合陀螺仪,实现定向定距离移动,考虑到场地打滑,机械结构误差,编码器误差累计等多种影响因素,这种方法会在多次移动、刹车、拐弯之后,出现较大误差;在短距离移动中,使用这种定位方式,可以达到1cm的定位精度,在刹车、拐弯、起步大概5-8次之后,会出现较大误差,不能保证重复定位精度,所以单纯依靠这种方法是行不通的,需要配合视觉定位实现精确定位和累计误差消除。
底盘电机
底盘电机有多重选择
- 直流有刷电机
- 直流步进电机
- 无刷伺服电机
我们队采用的方案是:直流有刷电机+齿轮减速器+光电型编码器
看到国赛场上大部分队采用的都是:步进电机+磁编码器+FOC闭环控制器
几乎没看到有用无刷电机的。
各个选择的个人看法:
直流有刷电机

优点
- 便宜
- 控制简单
- 容易更换
- 刚入门学习用的多
- 上手快
- 配合高精度光电编码器,定位精度还行
缺点
- 精度不够,空程大
- 建议采用行星减速器
- 采用的是电压控制速度,在低速情况下,不能稳定控制扭矩,导致扭矩不够,精度低
我们队用这种电机全然因为是代码更迭下来一直用的是这种电机,代码不好改,或者说是懒,后面用了别的方法来弥补这种电机导致的精度不够,强烈建议使用行星减速器,但最好不要用直流有刷电机,因为这个电机有个致命问题,这个电机是采用降低电压也就是减低功率来减低转速的,在需要低速的情况下,电机扭矩会不够,导致运行不稳定!非常坑!
步进电机

优点
- 便宜
- 控制简单
- 进度高
- 高速也还行,能跑的蛮快的
缺点
- 高速状态下会丢步
- 比较重
- 别的也没啥
相当建议采用步进电机,然后配合张大头的步进电机闭环驱动器,可以实现简单控制,稳定控制,精确控制。国赛上好多人用这个方案,连PID都不用写了。
这里需要提到一个点,就是步进电机在使用时,功率是恒定的,高速和低速情况下,功率都差不多,可以解决有刷电机的低速下扭矩不够的问题,但步进电机在高速下可能会丢步,所以需要采用磁编码器来实现闭环。一般买的闭环驱动器上都会有磁编码器,和电流闭环。所以用步进电机就会很简单,实际操作起来效果也会很好。
无刷电机
优点
- 稳定
- 准
- 速度快
- 劲大
- 好用
缺点
- 贵
- 对嵌入式电控选手要求有点高,得会用
- 如果直接上了伺服电机(驱动一体的那种)上一个选项可以忽略
建议采用无刷电机,真的好用,刹车快,起步快,配合FOC驱动器,嘎嘎好用,换向丝滑,学会使用了连机械臂也解决了。而且这玩意还准!
唯一的问题就是贵,一个电机大概499,好一点的随便上千,有钱的真的可以试试。
麦克纳姆轮
这个比赛车车好像用的都是麦克纳姆轮,说实话,如果机械臂自由度足够的话,车车应该是不需要转向的,一个方向走完全场,控制起来也舒服。当然,这里主要是总结下轮子的选择。
国赛的时候,有不少队反映场地打滑,导致自己成绩不好:我觉得吧,工程赛题,尽管看起来就像个小游戏,但实际工程上场地环境各种情况都有,打滑都是小问题,设计产品和设备的时候就要充分考虑这些情况,国赛主办方也提供了场地图纸,大家也都在实验室测试过的,基本摩擦系数应该是差不多的。国赛场地和我们队的测试场地差异就在国赛的场地是体育馆改的,有几个地图可能不是特别平,稍微有些颠簸。车车上加个悬挂系统就基本解决很多问题,再写一些算法检测打滑和偏向纠正,基本就能解决问题;题外话,这仅仅只是个不到6平米的小场地,如果放到实际物流仓储仓库做自动搬运机器人,那环境岂不是更加复杂。
麦轮的选择上:
首先是结实,承重要好,车车越重,摩擦力越大,越不易打滑,当然重量要合适,不然太重就跑不动啦;
轮径要大一些,在不超高的情况下,轮径越大跑的越快,都知道移动速度=电机转速*轮子周长。当然电机功率是一定的,轮子直径大了,力臂会长,扭矩不够的电机可能带不起来。但基本上咱这个赛题上,用42步进电机功率都能带动。
仔细看我们车车视频能看到,我们初赛没跑完,最后一个码垛没码完时间就结束了,总结就是跑的比较慢:50减速比的直流有刷电机+天府之土70mm轮子跑的还是太慢了
总结
有钱的就整无刷电机,没钱的就整步进电机,嫌自己事情少的,就整有刷电机。车轮上建议用天府之土轮子或者轮径大一些的,我看到几个队跑的飞快,轮子直径大概是100mm,建议可以搜一下,只要扭矩足够,精度足够,越快越好。

视觉识别控制精确定位
我们国赛用的是旭日派x3+USB摄像头+opencv识别圆环,视觉队友阿伟组队前跟我一样是玩stm32的,跟我一起后现学的机械视觉,总结就是,从省赛到国赛,视觉没出过问题,稳得一批。

具体视觉代码分享在后续文章,这里只谈元件使用。
用板载计算机还是嵌入式视觉
板载计算机就是 NUC,树莓派,香橙派一类的能够跑机械视觉,神经网络的Linux计算机,我建议用一个你会用的,速度快一点的,资料多的,Linux板子;例如:树莓派5,香橙派的RK3588,ROCK5系列的板子,这些SOC性能都足够了,便宜点的也够用,方便调试,移植代码的就行。
嵌入式视觉,openmv,K210之类的,都不推荐;K210识别二维码还可以,队里资金紧张的话,用到省赛也没问题,在河南省用K210到国赛也问题不大,稍微累点,后面到国赛的话麻烦些换个方案就行;openmv就更不推荐了,这价格,疫情涨价就算了,疫情之后,H7芯片的价格都这样了,还卖五六百,性价比太低。也别想着这玩意开源代码多,看看420元的树莓派5和499元的RK3588s吧。
总结
用RK3588或者树莓派5就OK的,配一个100块的USB摄像头就能识别OK了。
树莓派5+USB摄像头和起来也就520块。
机械臂
今年看到好多升降式的机械臂,很准,但我们队没用,原因是觉得自由度不高,针对性很强,一旦更换题目,就没招了,而且,运作模式固定了。
于是沿用之前的方案,采用舵机驱动,3D打印,CNC连杆

省赛用的是第二种,国赛用的是第一种,只是机械结构类似。用了机械臂逆运动学解算,算出色环坐标之后,直接转化为舵机角度放置。
总结
总体方案到这里就差不多了,每个环节的具体内容后面会再写的。
标签:总结,工创赛,步进,电机,扫描,二维码,国赛,选型,车车 From: https://www.cnblogs.com/sparkle-now/p/18278041/gong-chuang-sai-zong-jie-yu-gai-jinxuan-xin