前言
在实际中,一个CAD文件中往往存放多张图纸,有时需要这些图纸分开,单独保存或显示。以往的做法是在cad中人工进行处理。今天小编教您在web端一键把CAD图自动分割成多张图纸并能把每个子图导出成单独的dwg文件或保存成图片。
例如要处理的CAD原图为:

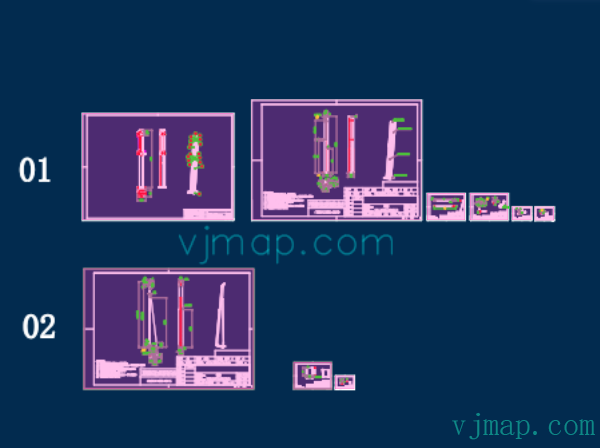
自动识别所有子图的结果为(所有子图的范围都被紫色颜色所高亮显示了):
实现
先上效果图
原理介绍
自动分割图纸算法
算法原理:
子图的特征为,外面有一个图框,如果能找出所有图中的图框,就能根据图框位置自动拆分出所有子图了。
而图框的最外面为矩形,同时这个图框矩形外面没有被其他矩形所包含了。
-
(1)遍历图中所有的矩形,获取所有的矩形范围
-
(2) 因为有时候矩形是由四条线所组成的,所以需要获取图中所有的水平线和垂直线,然后判断能否组成矩形
-
(3)对所有获取的矩形进行判断,如果这个矩形没有被其他矩形所包含了,则以为是子图的图框。
在图中查找所有线段坐标代码
// 在图中查找所有的直线段
const getMapLines = async () => {
// 查找图中所有的直线,二三维多段线
let queryEntTypes = ['AcDbLine', 'AcDbPolyline', 'AcDb2dPolyline', 'AcDb3dPolyline'];
let cond = queryEntTypes.map(t => `name='${getTypeNameById(t)}'`).join(' or '); // sql条件
let query = await svc.conditionQueryFeature({
condition: cond, // 只需要写sql语句where后面的条件内容,字段内容请参考文档"服务端条件查询和表达式查询"
fields: "objectid,points,envelop", // 只要id,坐标
limit: 100000 //设置很大,相当于把所有的都查出来。不传的话,默认只能取100条
});
let result = query.result || [];
result.forEach(rst => rst.envelop = map.getEnvelopBounds(rst.envelop));
return result;
}
获取所有子图范围矩形代码
// 得到一个图里面所有的矩形
function findAllRectInMap(lines) {
let allRects = [];
// 矩形(有可能是四条直线或者 一条多段线4个点(闭合),5个点(闭合)所组成
// 先查找一条多段线4个点(闭合),5个点(闭合)所组成的矩形
lines.forEach(e => {
if (e.points == "") {
return;
}
let points = e.points.split(";").map(p => vjmap.GeoPoint.fromString(p));
if (points[0].equals(points[points.length - 1])) {
// 如果是首尾闭合,则把最后那个点去了
points.length = points.length - 1;
}
if (points.length != 4) return; // 如果不是四个点。则不是矩形
// 判断四个点是否构成矩形
// 先计算中点的位置, 然后再计算中点到四个点的距离是不是一样即可。
let cx = (points[0].x + points[1].x + points[2].x + points[3].x) / 4.0;
let cy = (points[0].y + points[1].y + points[2].y + points[3].y) / 4.0;
let center = vjmap.geoPoint([cx, cy]);
let dist = center.distanceTo(points[0]);
let isDistEqual = true;
for(let k = 1; k < points.length; k++) {
if(!vjmap.isZero(center.distanceTo(points[k]) - dist)) {
isDistEqual = false;
break;
}
}
if (!isDistEqual) return false;//不是矩形
let rectObj = {
bounds: e.envelop, // 直接用获取到的外包矩形
ents: [e.objectid]
};
allRects.push(rectObj)
});
// 再查询由四条直线所组成的矩形
// 首先找到所有符合的线,条件为:坐标两个点,横线或竖线
lines = lines.filter(e => {
let points = e.points.split(";");
if (points.length !=2 ) return false;
e.geoStart = vjmap.GeoPoint.fromString(points[0]);
delete e.geoStart.z;// 不考虑z值
e.geoEnd = vjmap.GeoPoint.fromString(points[1]);
delete e.geoEnd.z;// 不考虑z值
e.startPoint = e.geoStart.toString();
e.endPoint = e.geoEnd.toString();
if (e.startPoint == e.endPoint) {
// 同一个点
return false;
}
let line = points.map(e=>vjmap.geoPoint(e.split(",")))
let isVLine = vjmap.isZero(line[0].x - line[1].x);//竖线
let isHLine = vjmap.isZero(line[0].y - line[1].y);//横线
if (!(isVLine || isHLine)) return false; // 并且是横线或竖线
e.isHorzLine = isHLine;
e.findFlag = false;
return true
}
)
// 把所有的坐标点存进一个字典数组中
let coordPointMap = {} // 坐标点字典
let entMap = {} // 实体字典
for(let ln of lines) {
// id与线实体相关联
entMap[ln.objectid] = ln;
coordPointMap[ln.startPoint] = coordPointMap[ln.startPoint] || new Set()
coordPointMap[ln.startPoint].add(ln.objectid)
coordPointMap[ln.endPoint] = coordPointMap[ln.endPoint] || new Set()
coordPointMap[ln.endPoint].add(ln.objectid)
}
for(let c in coordPointMap) {
coordPointMap[c] = Array.from(coordPointMap[c])
}
// 查找下一个线
const findNextLine = (ln, isStartPoint, nextIsHortLine) => {
const pt = isStartPoint ? ln.startPoint : ln.endPoint
const findLines = coordPointMap[pt];
if (!findLines) return null;
//先查找id开头相近的。有可能是同一个块
let idx = findLines.findIndex( e => e != ln.objectid && e.substr(0, 3) == ln.objectid.substr(0, 3));
if(idx < 0) {
idx = findLines.findIndex( e => e != ln.objectid);
if(idx < 0) return null;
}
const findLn = entMap[findLines[idx]];
if (findLn.isHorzLine != nextIsHortLine) return null; // 线类型不一样
let isLnStartPoint = findLn.startPoint != pt
return {
findLine: findLn,
isStartPoint: isLnStartPoint
}
};
// 下面找矩形
for(let ln of lines) {
if (ln.isHorzLine) continue;//只找竖线
// 找两个点都有相连的线
let n1 = coordPointMap[ln.startPoint].length;
let n2 = coordPointMap[ln.endPoint].length;
if (ln.findFlag) continue;
// 按链接关系一直找下去,从起始能到终点,说明是一个矩形
let nextLine1 = findNextLine(ln, true, true)
if (!nextLine1) continue;
let nextLine2 = findNextLine(nextLine1.findLine, nextLine1.isStartPoint, false)
if (!nextLine2) continue;
let nextLine3 = findNextLine(nextLine2.findLine, nextLine2.isStartPoint, true)
if (!nextLine3) continue;
let nextLine4 = findNextLine(nextLine3.findLine, nextLine3.isStartPoint, false)
if (!nextLine4) continue;
if (nextLine4.findLine.objectid == ln.objectid && nextLine4.isStartPoint == true) {
// 成功了,可以是一个矩形了
ln.findFlag = true;
nextLine1.findLine.findFlag = true;
nextLine2.findLine.findFlag = true;
nextLine3.findLine.findFlag = true;
// 增加矩形对象
let strBounds = '[' + ln.startPoint + ',' + (nextLine2.isStartPoint ? nextLine2.findLine.startPoint : nextLine2.findLine.endPoint) + ']';
let rectObj = {
bounds: vjmap.GeoBounds.fromString(strBounds),
ents: [ln.objectid, nextLine1.findLine.objectid, nextLine2.findLine.objectid, nextLine3.findLine.objectid]
};
allRects.push(rectObj)
}
}
return allRects;
}
// 自动拆分子图,显示所有子图的范围
// 原理为:查找图中的所有矩形(包括由直线所组成的矩形),这个矩形没有被其他矩形所包含,则应为是一个子图的范围
const splitMap = async () => {
message.info('请点击高亮的子图框,选择”保存成新的子图“或"保存成图片"')
let lnRes = await getMapLines();
let allRects = findAllRectInMap(lnRes);
// 在所有矩形中,只有没有被其他矩形所包含的,才以为是一个新的图的图框
let mapRects = [];
for(let i = 0; i < allRects.length; i++) {
let isContain = false;
for(let j = 0; j < allRects.length; j++) {
if (i == j) continue; // 如果是自己
// 判断矩形是否包含
if ( allRects[j].bounds.isContains(allRects[i].bounds)) {
isContain = true;
break;
}
}
if (!isContain) {
mapRects.push(allRects[i]); // 没有包含的,才以为是一个新的图的图框
}
}
}
把子图保存为单独的dwg图
根据范围保存为单独的dwg图可以利用唯杰地图提供的组合图形的服务接口,其文档为
/**
* 组合新地图参数
*/
export interface IComposeNewMap {
/** 地图ID. */
mapid: string;
/** 地图版本(为空时采用当前打开的地图版本). */
version?: string;
/** 地图裁剪范围,范围如[x1,y1,x2,y2], 为空的话,表示不裁剪 */
clipbounds?: [number, number, number, number];
/** 选择是包含还是相交(默认false表示包含,true相交) */
selByCrossing?: boolean;
/** 四参数(x偏移,y偏移,缩放,旋转弧度),可选,对坐标最后进行修正*/
fourParameter?: [number, number, number, number];
/** 要显示的图层名称,为空的时候,表示全部图层 */
layers?: string[];
/** 生新成图的图层名称前缀 */
layerPrefix?: string;
/** 生新成图的图层名称后缀 */
layerSuffix?: string;
/** 保存的文件名称,为空的时候,自根据参数自动生成 */
savefilename?: string;
}
其实现代码为
const saveSubMapByBounds = async points => {
let bounds = vjmap.GeoBounds.fromDataExtent(points);
bounds = map.fromLngLat(bounds);
let curMapParam = svc.currentMapParam();
let rsp = await svc.composeNewMap([
{
mapid: curMapParam.mapid,
version: curMapParam.version,
clipbounds: bounds.toArray() // 要裁剪的范围
}
])
let url = `https://vjmap.com/app/cloud/#/upload?fileid=${rsp.fileid}&mapid=${rsp.fileid}&isNewMapId=true`;
window.open(url);
};
把子图导出为图片
根据范围导出为图片可以利用唯杰地图提供的WMS图形的服务接口,其文档为
/**
* wms服务url地址接口
*/
export interface IWmsTileUrl {
/** 地图ID(为空时采用当前打开的mapid), 为数组时表时同时请求多个. */
mapid?: string | string[];
/** 地图版本(为空时采用当前打开的地图版本). */
version?: string | string[];
/** 图层名称(为空时采用当前打开的地图图层名称). */
layers?: string | string[];
/** 范围,缺省{bbox-epsg-3857}. (如果要获取地图cad一个范围的wms数据无需任何坐标转换,将此范围填cad范围,srs,crs,mapbounds填为空).*/
bbox?: string;
/** 当前坐标系,缺省(EPSG:3857). */
srs?: string;
/** cad图的坐标系,为空的时候由元数据坐标系决定. */
crs?: string | string[];
/** 地理真实范围,如有值时,srs将不起作用 */
mapbounds?: string;
/** 宽. */
width?: number;
/** 高. */
height?: number;
/** 是否透明. */
transparent?: boolean;
/** 不透明时的背景颜色,默认为白色。格式必须为rgb(r,g,b)或rgba(r,g,b,a),a不透明应该是255. */
backgroundColor?: string;
/** 四参数(x偏移,y偏移,缩放,旋转弧度),可选,对坐标最后进行修正*/
fourParameter?: string | string[];
/** 是否是矢量瓦片. */
mvt?: boolean;
/** 是否考虑旋转,在不同坐标系中转换是需要考虑。默认自动考虑是否需要旋转. */
useImageRotate?: boolean;
/** 旋转时图像处理算法. 1或2,默认自动选择(旋转时有用)*/
imageProcessAlg?: number;
/** 当前互联网底图地图类型 WGS84(84坐标,如天地图,osm), GCJ02(火星坐标,如高德,腾讯地图), BD09LL(百度经纬度坐标,如百度地图), BD09MC(百度墨卡托米制坐标,如百度地图)*/
webMapType?: "WGS84" | "GCJ02" | "BD09LL" | "BD09MC";
}
其实现代码为
const exportMapPngByBoundsUrl = points => {
let bounds = vjmap.GeoBounds.fromDataExtent(points);
bounds = map.fromLngLat(bounds);
// bounds = bounds.square(); // 保证为正方形
bounds = bounds.scale(1.01); // 稍大点,要不边框线有可能刚好看不见了
let pictureWidth = 1024 ;// 要导出的图片宽高
let wmsUrl = svc.wmsTileUrl({
width: pictureWidth,
height: Math.round(pictureWidth * bounds.height() / bounds.width()),
srs: "",
bbox: bounds.toString(),
transparent: false,
backgroundColor: 'rgb(0,0,0)'
});
window.open(wmsUrl);
};
最后
我们通过短短的一二百行代码即实现了把cad图自动分割成多张子图,并成单独保存为新的dwg文件和导出图片,大大减轻了人工手动分图的工作量。大家如果感兴趣,可访问 https://vjmap.com/demo/#/demo/map/service/22findsubmapsplit 在线体验下。
前言
在实际中,一个CAD文件中往往存放多张图纸,有时需要这些图纸分开,单独保存或显示。以往的做法是在cad中人工进行处理。今天小编教您在web端一键把CAD图自动分割成多张图纸并能把每个子图导出成单独的dwg文件或保存成图片。
例如要处理的CAD原图为:
自动识别所有子图的结果为(所有子图的范围都被紫色颜色所高亮显示了):
实现
先上效果图
原理介绍
自动分割图纸算法
算法原理:
子图的特征为,外面有一个图框,如果能找出所有图中的图框,就能根据图框位置自动拆分出所有子图了。
而图框的最外面为矩形,同时这个图框矩形外面没有被其他矩形所包含了。
-
(1)遍历图中所有的矩形,获取所有的矩形范围
-
(2) 因为有时候矩形是由四条线所组成的,所以需要获取图中所有的水平线和垂直线,然后判断能否组成矩形
-
(3)对所有获取的矩形进行判断,如果这个矩形没有被其他矩形所包含了,则以为是子图的图框。
在图中查找所有线段坐标代码
// 在图中查找所有的直线段
const getMapLines = async () => {
// 查找图中所有的直线,二三维多段线
let queryEntTypes = ['AcDbLine', 'AcDbPolyline', 'AcDb2dPolyline', 'AcDb3dPolyline'];
let cond = queryEntTypes.map(t => `name='${getTypeNameById(t)}'`).join(' or '); // sql条件
let query = await svc.conditionQueryFeature({
condition: cond, // 只需要写sql语句where后面的条件内容,字段内容请参考文档"服务端条件查询和表达式查询"
fields: "objectid,points,envelop", // 只要id,坐标
limit: 100000 //设置很大,相当于把所有的都查出来。不传的话,默认只能取100条
});
let result = query.result || [];
result.forEach(rst => rst.envelop = map.getEnvelopBounds(rst.envelop));
return result;
}
获取所有子图范围矩形代码
// 得到一个图里面所有的矩形
function findAllRectInMap(lines) {
let allRects = [];
// 矩形(有可能是四条直线或者 一条多段线4个点(闭合),5个点(闭合)所组成
// 先查找一条多段线4个点(闭合),5个点(闭合)所组成的矩形
lines.forEach(e => {
if (e.points == "") {
return;
}
let points = e.points.split(";").map(p => vjmap.GeoPoint.fromString(p));
if (points[0].equals(points[points.length - 1])) {
// 如果是首尾闭合,则把最后那个点去了
points.length = points.length - 1;
}
if (points.length != 4) return; // 如果不是四个点。则不是矩形
// 判断四个点是否构成矩形
// 先计算中点的位置, 然后再计算中点到四个点的距离是不是一样即可。
let cx = (points[0].x + points[1].x + points[2].x + points[3].x) / 4.0;
let cy = (points[0].y + points[1].y + points[2].y + points[3].y) / 4.0;
let center = vjmap.geoPoint([cx, cy]);
let dist = center.distanceTo(points[0]);
let isDistEqual = true;
for(let k = 1; k < points.length; k++) {
if(!vjmap.isZero(center.distanceTo(points[k]) - dist)) {
isDistEqual = false;
break;
}
}
if (!isDistEqual) return false;//不是矩形
let rectObj = {
bounds: e.envelop, // 直接用获取到的外包矩形
ents: [e.objectid]
};
allRects.push(rectObj)
});
// 再查询由四条直线所组成的矩形
// 首先找到所有符合的线,条件为:坐标两个点,横线或竖线
lines = lines.filter(e => {
let points = e.points.split(";");
if (points.length !=2 ) return false;
e.geoStart = vjmap.GeoPoint.fromString(points[0]);
delete e.geoStart.z;// 不考虑z值
e.geoEnd = vjmap.GeoPoint.fromString(points[1]);
delete e.geoEnd.z;// 不考虑z值
e.startPoint = e.geoStart.toString();
e.endPoint = e.geoEnd.toString();
if (e.startPoint == e.endPoint) {
// 同一个点
return false;
}
let line = points.map(e=>vjmap.geoPoint(e.split(",")))
let isVLine = vjmap.isZero(line[0].x - line[1].x);//竖线
let isHLine = vjmap.isZero(line[0].y - line[1].y);//横线
if (!(isVLine || isHLine)) return false; // 并且是横线或竖线
e.isHorzLine = isHLine;
e.findFlag = false;
return true
}
)
// 把所有的坐标点存进一个字典数组中
let coordPointMap = {} // 坐标点字典
let entMap = {} // 实体字典
for(let ln of lines) {
// id与线实体相关联
entMap[ln.objectid] = ln;
coordPointMap[ln.startPoint] = coordPointMap[ln.startPoint] || new Set()
coordPointMap[ln.startPoint].add(ln.objectid)
coordPointMap[ln.endPoint] = coordPointMap[ln.endPoint] || new Set()
coordPointMap[ln.endPoint].add(ln.objectid)
}
for(let c in coordPointMap) {
coordPointMap[c] = Array.from(coordPointMap[c])
}
// 查找下一个线
const findNextLine = (ln, isStartPoint, nextIsHortLine) => {
const pt = isStartPoint ? ln.startPoint : ln.endPoint
const findLines = coordPointMap[pt];
if (!findLines) return null;
//先查找id开头相近的。有可能是同一个块
let idx = findLines.findIndex( e => e != ln.objectid && e.substr(0, 3) == ln.objectid.substr(0, 3));
if(idx < 0) {
idx = findLines.findIndex( e => e != ln.objectid);
if(idx < 0) return null;
}
const findLn = entMap[findLines[idx]];
if (findLn.isHorzLine != nextIsHortLine) return null; // 线类型不一样
let isLnStartPoint = findLn.startPoint != pt
return {
findLine: findLn,
isStartPoint: isLnStartPoint
}
};
// 下面找矩形
for(let ln of lines) {
if (ln.isHorzLine) continue;//只找竖线
// 找两个点都有相连的线
let n1 = coordPointMap[ln.startPoint].length;
let n2 = coordPointMap[ln.endPoint].length;
if (ln.findFlag) continue;
// 按链接关系一直找下去,从起始能到终点,说明是一个矩形
let nextLine1 = findNextLine(ln, true, true)
if (!nextLine1) continue;
let nextLine2 = findNextLine(nextLine1.findLine, nextLine1.isStartPoint, false)
if (!nextLine2) continue;
let nextLine3 = findNextLine(nextLine2.findLine, nextLine2.isStartPoint, true)
if (!nextLine3) continue;
let nextLine4 = findNextLine(nextLine3.findLine, nextLine3.isStartPoint, false)
if (!nextLine4) continue;
if (nextLine4.findLine.objectid == ln.objectid && nextLine4.isStartPoint == true) {
// 成功了,可以是一个矩形了
ln.findFlag = true;
nextLine1.findLine.findFlag = true;
nextLine2.findLine.findFlag = true;
nextLine3.findLine.findFlag = true;
// 增加矩形对象
let strBounds = '[' + ln.startPoint + ',' + (nextLine2.isStartPoint ? nextLine2.findLine.startPoint : nextLine2.findLine.endPoint) + ']';
let rectObj = {
bounds: vjmap.GeoBounds.fromString(strBounds),
ents: [ln.objectid, nextLine1.findLine.objectid, nextLine2.findLine.objectid, nextLine3.findLine.objectid]
};
allRects.push(rectObj)
}
}
return allRects;
}
// 自动拆分子图,显示所有子图的范围
// 原理为:查找图中的所有矩形(包括由直线所组成的矩形),这个矩形没有被其他矩形所包含,则应为是一个子图的范围
const splitMap = async () => {
message.info('请点击高亮的子图框,选择”保存成新的子图“或"保存成图片"')
let lnRes = await getMapLines();
let allRects = findAllRectInMap(lnRes);
// 在所有矩形中,只有没有被其他矩形所包含的,才以为是一个新的图的图框
let mapRects = [];
for(let i = 0; i < allRects.length; i++) {
let isContain = false;
for(let j = 0; j < allRects.length; j++) {
if (i == j) continue; // 如果是自己
// 判断矩形是否包含
if ( allRects[j].bounds.isContains(allRects[i].bounds)) {
isContain = true;
break;
}
}
if (!isContain) {
mapRects.push(allRects[i]); // 没有包含的,才以为是一个新的图的图框
}
}
}
把子图保存为单独的dwg图
根据范围保存为单独的dwg图可以利用唯杰地图提供的组合图形的服务接口,其文档为
/**
* 组合新地图参数
*/
export interface IComposeNewMap {
/** 地图ID. */
mapid: string;
/** 地图版本(为空时采用当前打开的地图版本). */
version?: string;
/** 地图裁剪范围,范围如[x1,y1,x2,y2], 为空的话,表示不裁剪 */
clipbounds?: [number, number, number, number];
/** 选择是包含还是相交(默认false表示包含,true相交) */
selByCrossing?: boolean;
/** 四参数(x偏移,y偏移,缩放,旋转弧度),可选,对坐标最后进行修正*/
fourParameter?: [number, number, number, number];
/** 要显示的图层名称,为空的时候,表示全部图层 */
layers?: string[];
/** 生新成图的图层名称前缀 */
layerPrefix?: string;
/** 生新成图的图层名称后缀 */
layerSuffix?: string;
/** 保存的文件名称,为空的时候,自根据参数自动生成 */
savefilename?: string;
}
其实现代码为
const saveSubMapByBounds = async points => {
let bounds = vjmap.GeoBounds.fromDataExtent(points);
bounds = map.fromLngLat(bounds);
let curMapParam = svc.currentMapParam();
let rsp = await svc.composeNewMap([
{
mapid: curMapParam.mapid,
version: curMapParam.version,
clipbounds: bounds.toArray() // 要裁剪的范围
}
])
let url = `https://vjmap.com/app/cloud/#/upload?fileid=${rsp.fileid}&mapid=${rsp.fileid}&isNewMapId=true`;
window.open(url);
};
把子图导出为图片
根据范围导出为图片可以利用唯杰地图提供的WMS图形的服务接口,其文档为
/**
* wms服务url地址接口
*/
export interface IWmsTileUrl {
/** 地图ID(为空时采用当前打开的mapid), 为数组时表时同时请求多个. */
mapid?: string | string[];
/** 地图版本(为空时采用当前打开的地图版本). */
version?: string | string[];
/** 图层名称(为空时采用当前打开的地图图层名称). */
layers?: string | string[];
/** 范围,缺省{bbox-epsg-3857}. (如果要获取地图cad一个范围的wms数据无需任何坐标转换,将此范围填cad范围,srs,crs,mapbounds填为空).*/
bbox?: string;
/** 当前坐标系,缺省(EPSG:3857). */
srs?: string;
/** cad图的坐标系,为空的时候由元数据坐标系决定. */
crs?: string | string[];
/** 地理真实范围,如有值时,srs将不起作用 */
mapbounds?: string;
/** 宽. */
width?: number;
/** 高. */
height?: number;
/** 是否透明. */
transparent?: boolean;
/** 不透明时的背景颜色,默认为白色。格式必须为rgb(r,g,b)或rgba(r,g,b,a),a不透明应该是255. */
backgroundColor?: string;
/** 四参数(x偏移,y偏移,缩放,旋转弧度),可选,对坐标最后进行修正*/
fourParameter?: string | string[];
/** 是否是矢量瓦片. */
mvt?: boolean;
/** 是否考虑旋转,在不同坐标系中转换是需要考虑。默认自动考虑是否需要旋转. */
useImageRotate?: boolean;
/** 旋转时图像处理算法. 1或2,默认自动选择(旋转时有用)*/
imageProcessAlg?: number;
/** 当前互联网底图地图类型 WGS84(84坐标,如天地图,osm), GCJ02(火星坐标,如高德,腾讯地图), BD09LL(百度经纬度坐标,如百度地图), BD09MC(百度墨卡托米制坐标,如百度地图)*/
webMapType?: "WGS84" | "GCJ02" | "BD09LL" | "BD09MC";
}
其实现代码为
const exportMapPngByBoundsUrl = points => {
let bounds = vjmap.GeoBounds.fromDataExtent(points);
bounds = map.fromLngLat(bounds);
// bounds = bounds.square(); // 保证为正方形
bounds = bounds.scale(1.01); // 稍大点,要不边框线有可能刚好看不见了
let pictureWidth = 1024 ;// 要导出的图片宽高
let wmsUrl = svc.wmsTileUrl({
width: pictureWidth,
height: Math.round(pictureWidth * bounds.height() / bounds.width()),
srs: "",
bbox: bounds.toString(),
transparent: false,
backgroundColor: 'rgb(0,0,0)'
});
window.open(wmsUrl);
};
最后
我们通过短短的一二百行代码即实现了把cad图自动分割成多张子图,并成单独保存为新的dwg文件和导出图片,大大减轻了人工手动分图的工作量。大家如果感兴趣,可访问 https://vjmap.com/demo/#/demo/map/service/22findsubmapsplit 在线体验下。
标签:Web,string,ln,子图,bounds,points,let,矩形,成多张 From: https://www.cnblogs.com/vjmap/p/16807655.html