- 首发公号:Rand_cs
上一节讲述了 ARMv8 异常模型,很多理论,这一节来看一个实际的例子,来看看 minos 中的异常处理流程
异常向量表
直接来看 minos 的异常向量表,很多事情就明了了:
elx_vectors:
c0sync: // Current EL with SP0
BAD_MODE VECTOR_C0_SYNC
.balign 0x80
c0irq:
BAD_MODE VECTOR_C0_IRQ
.balign 0x80
c0fiq:
BAD_MODE VECTOR_C0_FIQ
.balign 0x80
c0serr:
BAD_MODE VECTOR_C0_SERR
.balign 0x80 // Current EL with SPx
cxsync:
b __sync_exception_from_current_el
.balign 0x80
cxirq:
b __irq_exception_from_current_el
.balign 0x80
cxfiq:
BAD_MODE VECTOR_CX_FIQ
.balign 0x80
cxserr:
BAD_MODE VECTOR_CX_SERR
.balign 0x80 //Lower EL using AArch64
l64sync:
b __sync_exception_from_lower_el
.balign 0x80
l64irq:
b __irq_exception_from_lower_el
.balign 0x80
l64fiq:
BAD_MODE VECTOR_L64_FIQ
.balign 0x80
l64serr:
BAD_MODE VECTOR_L64_SERR
.balign 0x80 // Lower EL using AArch32
l32sync:
b __sync_exception_from_lower_el
.balign 0x80
l32irq:
b __irq_exception_from_lower_el
.balign 0x80
l32fiq:
BAD_MODE VECTOR_L32_FIQ
.balign 0x80
l32serr:
BAD_MODE VECTOR_L32_SERR
.balign 0x80
- 如果异常来自当前特权级 && 使用 SP_EL0,目前不支持
- 所有 fiq 和 serror 目前不支持
再排除掉 32 位的情况,总共还剩下 4 个向量:__sync_exception_from_current_el、__irq_exception_from_current_el、__sync_exception_from_lower_el、__irq_exception_from_lower_el,顾名思义,我们一个个来看它们是如何处理的
__sync_exception_from_current_el
vfunc __sync_exception_from_current_el
SAVE_GP_REGS // 保存通用寄存器
mov x0, sp
str x0, [x18, #TASK_STACK_OFFSET]
// use SVC for sched() , other type will
// go to the exception handler.
mrs x1, ESR_EL2
ubfx x2, x1, #ESR_ELx_EC_SHIFT, #ESR_ELx_EC_WIDTH
cmp x2, #ESR_ELx_EC_SVC64
b.eq __sync_current_out
bl sync_exception_from_current_el // go to the c handler, will die.
__sync_current_out:
b exception_return
SAVE_GP_REGS
不论啥异常处理,第一步都是保存现场,保存一系列的寄存器到 SP_ELx
.macro SAVE_GP_REGS
stp x29, x30, [sp, #-16]!
__SAVE_GP_REGS
.endm
.macro __SAVE_GP_REGS
stp x27, x28, [sp, #-16]!
stp x25, x26, [sp, #-16]!
stp x23, x24, [sp, #-16]!
stp x21, x22, [sp, #-16]!
stp x19, x20, [sp, #-16]!
stp x17, x18, [sp, #-16]!
stp x15, x16, [sp, #-16]!
stp x13, x14, [sp, #-16]!
stp x11, x12, [sp, #-16]!
stp x9, x10, [sp, #-16]!
stp x7, x8, [sp, #-16]!
stp x5, x6, [sp, #-16]!
stp x3, x4, [sp, #-16]!
stp x1, x2, [sp, #-16]!
str x0, [sp, #-8]!
mrs x0, SP_EL0
str x0, [sp, #-8]!
mrs x0, ARM64_SPSR
str x0, [sp, #-8]!
mrs x0, ARM64_ELR
str x0, [sp, #-8]!
dsb nsh
.endm
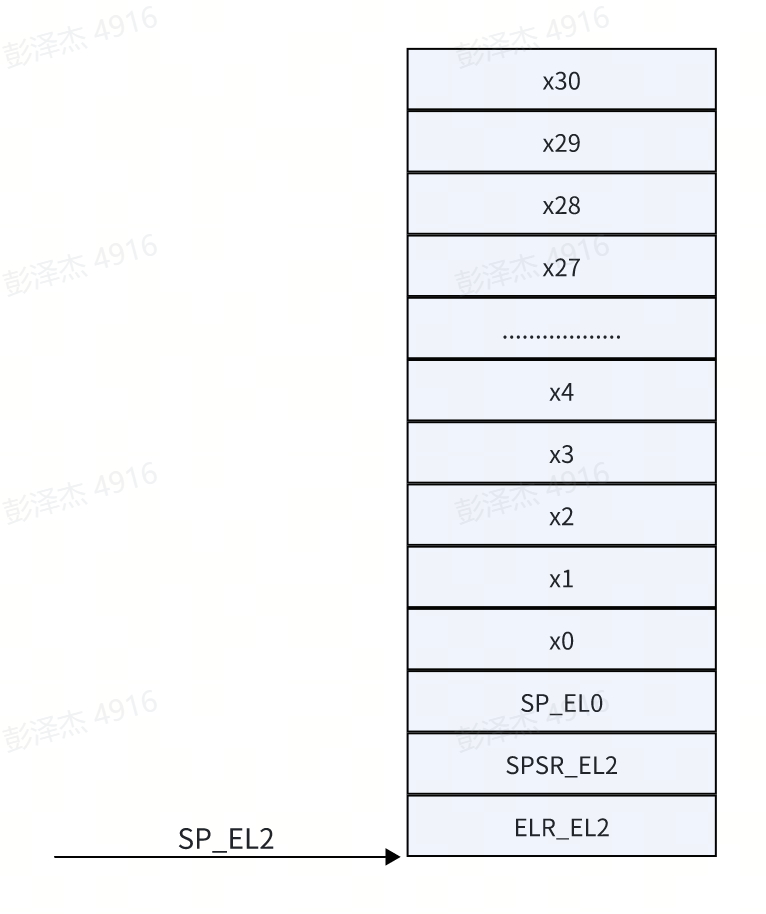
执行完上述操作后,minos EL2 栈(线程在 EL2 的栈)布局如下所示:
mov x0, sp
str x0, [x18, #TASK_STACK_OFFSET] // 将保存了现场后的栈指针赋值给 task.stack_base
// .....................................................
#define current_regs (gp_regs *)current->stack_base
这两句汇编将上图中的 SP_EL2 的值赋值给了当前线程 task->stack_base 字段,minos 中定义了一个获取当前线程保存在 SP_EL2 栈里面寄存器集合的宏,其定义如下
struct aarch64_regs {
uint64_t pc; // elr_el2
uint64_t pstate; // spsr_el2
uint64_t sp; // sp_el0
uint64_t x0;
uint64_t x1;
uint64_t x2;
uint64_t x3;
uint64_t x4;
uint64_t x5;
uint64_t x6;
uint64_t x7;
uint64_t x8;
uint64_t x9;
uint64_t x10;
uint64_t x11;
uint64_t x12;
uint64_t x13;
uint64_t x14;
uint64_t x15;
uint64_t x16;
uint64_t x17;
uint64_t x18;
uint64_t x19;
uint64_t x20;
uint64_t x21;
uint64_t x22;
uint64_t x23;
uint64_t x24;
uint64_t x25;
uint64_t x26;
uint64_t x27;
uint64_t x28;
uint64_t x29;
uint64_t lr;
}__packed;
可以看出,跟咱们图中结构布局一模一样,有时我们需要从栈里面获取低特权级的一些寄存器信息。
mrs x1, ESR_EL2 // 获取异常原因
// x2=(x1>>ESR_ELx_EC_SHIFT)&ESR_ELx_EC_WIDTH = x1 >> 26 & 6
ubfx x2, x1, #ESR_ELx_EC_SHIFT, #ESR_ELx_EC_WIDTH
cmp x2, #ESR_ELx_EC_SVC64
b.eq __sync_current_out
// ...............................................
#define ESR_ELx_EC_SHIFT (26)
#define ESR_ELx_EC_WIDTH (6)
#define ESR_ELx_EC_SVC64 (0x15)
这段代码意思是查看 ESR 中显示的异常原因,看看是不是 ESR_ELx_EC_SVC64,如果是跳转到 __sync_current_out 进行异常返回阶段的处理

NOTE:这部分可以查手册验证,https://developer.arm.com/documentation/ddi0601/2023-12/AArch64-Registers?lang=en
__sync_current_out
exception_return
__sync_current_out:
b exception_return
vfunc exception_return
LOAD_PCPU_STACK x1 // load percpu stack, need ensure the irq is off.
bl exception_return_handler // check whether need to resched. x18 will the next task.
ldr x1, [x18, #TASK_STACK_OFFSET] // load the running task's stack
mov sp, x1 // change to the new stack address
ldr x1, [sp, #8] // load spsr
and x1, x1, #0x0f
cmp x1, #9 // whether the task will return to user
b.eq __do_exception_return
mov x0, sp
bl task_return_to_user
.macro LOAD_PCPU_STACK, tmp0
mrs \tmp0, ARM64_TPIDR
ldr \tmp0, [\tmp0, #PCPU_STACK_OFFSET]
mov sp, \tmp0
.endm
#define ARM64_TPIDR TPIDR_EL1 // 无虚拟化,minos 作为 el1 kernel
#define ARM64_TPIDR TPIDR_EL2 // 有虚拟化,minos 作为 el2 hypervisor
每个物理 cpu,在 minos 中都定义了一个 struct pcpu,在启动期间,每个 pcpu 指针都被存放到了 ARM64_TPIDR 寄存里面。同样是启动期间,就划分了一份内存,作为 pcpu 的栈。LOAD_PCPU_STACK 执行的操作就是换栈,让 SP_EL2 指向 pcpu 栈
exception_return_handler
// 异常返回时,检查是否需要 resched
void exception_return_handler(void)
{
int ret = __exception_return_handler();
// 只要不是执行出错,那么这里都会重新开始执行一个 task,所以这里重启 sched_timer
if ((ret == 0) || (ret == -EAGAIN))
sched_update_sched_timer();
}
// 在异常返回的时候做 resched 操作
static inline int __exception_return_handler(void)
{
struct task *next, *task = current;
struct task_info *ti = to_task_info(task);
struct pcpu *pcpu = get_pcpu();
/*
* if the task is suspend state, means next the cpu
* will call sched directly, so do not sched out here
*
* 1 - when preempt_count > 0, the scheduler whill try
* to shced() when preempt_enable.
* 2 - __TIF_DONOT_PREEMPT is set, it will call sched() at
* once.
*/
// 如果不需要 resched 或者 不允许抢占 或者 不要抢占,那么再次执行该 task
if (!(ti->flags & __TIF_NEED_RESCHED) || (ti->preempt_count > 0) ||
(ti->flags & __TIF_DONOT_PREEMPT))
// 那么就再 run 一下
goto task_run_again;
// 否则先清除 __TIF_NEED_RESCHED(因为马上就要 resched,所以不需要该标志了)
ti->flags &= ~__TIF_NEED_RESCHED;
// 然后挑选 next task
next = pick_next_task(pcpu);
// 如果挑选的就是当前 task
if ((next == task))
goto task_run_again;
// 切换 task
switch_to_task(task, next);
return 0;
task_run_again:
// 清除掉当前 task 时间片已经到了的标志 TIF_TICK_EXHAUST
if (test_and_clear_bit(TIF_TICK_EXHAUST, &ti->flags))
return -EAGAIN;
else
return -EACCES;
}
终于来到熟悉的 C 界面,会发现 exception_return_handler 这个函数就是调度操作,这在 minos 3.1 CPU虚拟化 讲过,这下就连起来了,minos 是在异常返回的时候会执行(后面可以看到其他异常在返回的时候也会执行 exception_return_handler)调度操作
TODO:为什么要换成 pcpu 栈
step out
回到 __sync_current_out->exception_return
// 切换为 task 栈
ldr x1, [x18, #TASK_STACK_OFFSET] // load the running task's stack
mov sp, x1 // change to the new stack address
ldr x1, [sp, #8] // load spsr
and x1, x1, #0x0f
cmp x1, #9 // whether the task will return to user
b.eq __do_exception_return
首先是切换为 task 栈,然后获取 task 栈里面的 SPSR_EL2 的值,再次查手册,查看 SPSR_EL2 字段的后 4 位什么含义:
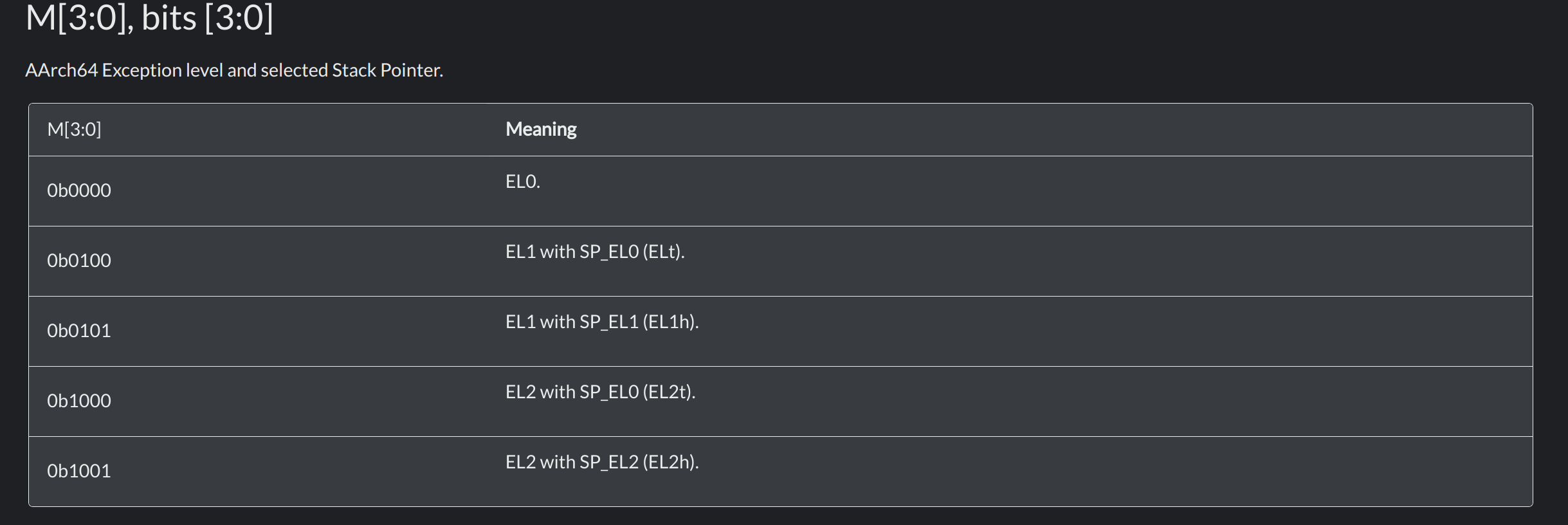
可以看出,#9(1001) 表示异常是来自 EL2 with SP_EL2,如果该字段是 9,说明我们将同级返回,否则返回到 EL1(返回到虚机)
__do_exception_return
__do_exception_return:
LOAD_GP_REGS
eret
返回很简单,LOAD_GP_REGS 就是 SAVE_GP_REGS 的逆操作,eret 指令就是恢复 SPSR_EL2 的值到 PSTATE,恢复 ELR_EL2 的值到 PC
mov x0, sp
bl task_return_to_user
如果 SPSR_EL2 最后 4 位不是 9,那么会调用 task_return_to_user 返回到虚拟机中,本文中不做详细说明
sync_exception_from_current_el
回到 __sync_exception_from_current_el,如果不是 ESR_ELx_EC_SVC64 调用
bl sync_exception_from_current_el // go to the c handler, will die.
__sync_current_out:
b exception_return
// 处理同步异常
static void handle_sync_exception(gp_regs *regs)
{
uint32_t esr_value;
uint32_t ec_type;
struct sync_desc *ec;
// 获取异常原因
esr_value = read_esr();
ec_type = ESR_ELx_EC(esr_value);
if (ec_type >= ESR_ELx_EC_MAX)
panic("unknown sync exception type from current EL %d\n", ec_type);
/*
* for normal userspace process the return address shall
* be adjust
*/
// 获取该异常的描述符
ec = process_sync_descs[ec_type];
// 执行该异常处理程序,并且修正 elr_el2 的值
regs->pc += ec->ret_addr_adjust;
ec->handler(regs, ec_type, esr_value);
}
void sync_exception_from_current_el(gp_regs *regs)
{
handle_sync_exception(regs);
}
如果不是 svc 调用(在 minos 里面只有 sched->svc #0 这一种情况)那么跳去 sync_exception_from_current_el 处理同步异常
这里我们就只是先简单看一下,每个同步异常都有个描述符,里面有相关回调 handler,这里调用相关 handler 来处理同步异常
__irq_exception_from_current_el
来自当前特权级的 irq,比如说 cpu 之间通信,发送 SGI 类型的中断信号给某个 cpu,就会调用 __irq_exception_from_current_el
vfunc __irq_exception_from_current_el
SAVE_GP_REGS
// Set the irq flags into ti->flags.
ldr x1, [x18, #TASK_INFO_FLAGS_OFFSET]
orr x1, x1, #__TIF_HARDIRQ_MASK
str x1, [x18, #TASK_INFO_FLAGS_OFFSET]
dsb sy
mov x0, sp
str x0, [x18, #TASK_STACK_OFFSET] // store the stack in case this task will scheded out.
bl irq_from_current_el // irq is disabled all the time
// clear the irq flags into ti->flags.
ldr x1, [x18, #TASK_INFO_FLAGS_OFFSET]
and x1, x1, #(~__TIF_HARDIRQ_MASK)
str x1, [x18, #TASK_INFO_FLAGS_OFFSET]
dsb sy
b exception_return
首先仍然是 SAVE_GP_REGS 来保存上下文
// Set the irq flags into ti->flags.
// 设置中断上下文标志
ldr x1, [x18, #TASK_INFO_FLAGS_OFFSET]
orr x1, x1, #__TIF_HARDIRQ_MASK
str x1, [x18, #TASK_INFO_FLAGS_OFFSET]
dsb sy
//......................................
DEFINE(TASK_INFO_FLAGS_OFFSET, offsetof(struct task_info, flags));
#define __TIF_IN_INTERRUPT (__TIF_HARDIRQ_MASK | __TIF_SOFTIRQ_MASK)
struct task_info {
int preempt_count;
unsigned long flags;
};
这一段汇编就是在当前线程 task->task_info.flags 中设置 __TIF_HARDIRQ_MASK,表示当前线程处于中断上下文了,而且是硬中断上下文,这里作者应该是想像 Linux 那样设计,但是目前相关功能还不是很完善,设置该标志就是表示处于中断上下文,没有区分软硬。
// 保存当前栈地址到 task.stack_base,然后跳去 irq_from_current_el
// 当前栈地址就是 gp_regs 结构指针
mov x0, sp
str x0, [x18, #TASK_STACK_OFFSET] // store the stack in case this task will scheded out.
bl irq_from_current_el // irq is disabled all the time
irq_from_current_el
void irq_from_current_el(gp_regs *regs)
{
irq_handler(regs);
}
static inline void irq_handler(gp_regs *regs)
{
do_irq_handler();
}
// irq 的 handler 函数
int do_irq_handler(void)
{
uint32_t irq;
struct irq_desc *irq_desc;
int cpuid = smp_processor_id(); // 当前 pcpuid
// 遍历当前所有 pending 等待的 irq
while (1) {
// 获取中断号
irq = irq_chip->get_pending_irq();
if (irq >= BAD_IRQ)
return 0;
// 中断号对应的中断描述符
irq_desc = get_irq_desc_cpu(cpuid, irq);
if (unlikely(!irq_desc)) {
pr_err("irq is not actived %d\n", irq);
irq_chip->irq_eoi(irq);
irq_chip->irq_dir(irq);
continue;
}
// 执行中断描述符中注册的回调 handler
do_handle_host_irq(cpuid, irq_desc);
}
return 0;
}
此函数就是去执行实际的中断处理函数,不同中断都有注册一个中断描述符,里面有对应的回调,这里就是去调用这个回调来处理中断。具体的中断子系统下一节 4.3 讲述,侧重与硬件相关的流程。
step out
// clear the irq flags into ti->flags.
ldr x1, [x18, #TASK_INFO_FLAGS_OFFSET]
and x1, x1, #(~__TIF_HARDIRQ_MASK)
str x1, [x18, #TASK_INFO_FLAGS_OFFSET]
dsb sy
b exception_return
这部分就是清除硬中断 __TIF_HARDIRQ_MASK 标志,然后跳去 exception_return 执行中断返回,这个在上面提到过,会先去看是否需要调度,随后异常返回
__sync_exception_from_lower_el
来自低特权级的同步异常,典型的情况就是低特权级调用 hvc、smc 指令,然后 trap 到 EL2,来看看 minos 是怎么处理的
vfunc __sync_exception_from_lower_el
SAVE_GP_REGS
PCPU_LOAD_CURRENT_TASK // x18 will be the current task.
bl task_exit_from_user
mov x0, sp
bl sync_exception_from_lower_el // go to the c handler.
mov x0, sp
bl task_return_to_user
LOAD_GP_REGS
eret
同样的,首先通过 SAVE_GP_REGS 保存通用寄存器
// 将当前 pcpu 上记录的 current running task 指针记录到 x18
.macro PCPU_LOAD_CURRENT_TASK
mrs x18, ARM64_TPIDR
ldr x18, [x18, #PCPU_CURRENT_TASK] // x18=pcpu->running_task
.endm
这一步将当前 task 指针记录到 x18 寄存器,因为在低特权级 x18 可不一定表示 task 指针,可能就是普通的通用寄存器,也可能被 guest OS 留作他用,我们不得而知。但是 minos 里面 x18 是作为当前 task 指针使用的,这在进入高异常等级的时候设置,返回低异常等级的时候从栈里面恢复。只要在 minos EL2 级别,x18 就表示当前 task 指针
task_exit_from_user 从 guest OS 退出到 hypervisor,细节先略过
mov x0, sp
bl sync_exception_from_lower_el // go to the c handler.
类似 sync_exception_from_current_el,从 ESR 里面获取异常原因,然后获取相关的同步异常描述符,执行里面的 handler 来处理同步异常
mov x0, sp
bl task_return_to_user
LOAD_GP_REGS
eret
随后执行 task_return_to_user 进入虚机,LOAD_GP_REGS 恢复异常上下文,eret 异常返回,都是一样的操作
__irq_exception_from_lower_el
来自低特权级的 irq,典型的是虚机的 vtimer 中断,其处理方式基本和 irq_from_current_el 一样,只是增加了设置 x18 为当前 task 这个步骤,具体不说明了,下面的汇编应该能看懂
vfunc __irq_exception_from_lower_el
SAVE_GP_REGS
PCPU_LOAD_CURRENT_TASK // x18 will store the current task
// Set the irq flags into ti->flags.
ldr x1, [x18, #TASK_INFO_FLAGS_OFFSET]
orr x1, x1, #__TIF_HARDIRQ_MASK
str x1, [x18, #TASK_INFO_FLAGS_OFFSET]
dsb sy
mov x0, sp // x0 is the gp_regs pass to irq_c_handler
str x0, [x18, #TASK_STACK_OFFSET] // save the current task's stack to task
bl task_exit_from_user
mov x0, sp
bl irq_from_lower_el // call the c irq handler
// clear the irq flags into ti->flags.
ldr x1, [x18, #TASK_INFO_FLAGS_OFFSET]
and x1, x1, #(~__TIF_HARDIRQ_MASK)
str x1, [x18, #TASK_INFO_FLAGS_OFFSET]
dsb sy
b exception_return
vfunc_end __irq_exception_from_lower_el
- 首发公号:Rand_cs