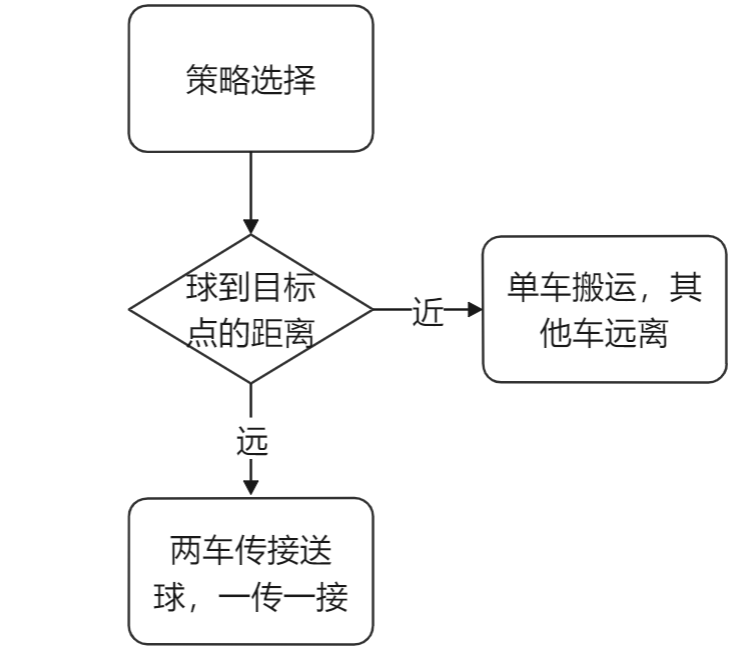
策略选择-这部分放在lua层-myball.lua
c++层的内容
lua层
--desc:
Kicker_x = function()
return COurRole_x("Kicker")
end
Kicker_y = function()
return COurRole_y("Kicker")
end
R_x = function()
return COurRole_x("Receiver")
end
R_y = function()
return COurRole_y("Receiver")
end
--读取txt文件
local function readFile(fileName)
local f = assert(io.open(fileName,'r'))
local content = f:read('*all')
local margin = string.find(content,' ')
local x = tonumber( string.sub(content,0,margin))
local y =tonumber( string.sub(content,margin,string.len(content)))
f:close()
return x,y
end
r2kdir =function ()
return COurRole2RoleDir("Receiver","Kicker")
end
Receiverdir = function ()
return CRole2BallDir("Receiver")
end
gPlayTable.CreatePlay{
firstState = "choose",
--先根据距离选择不同的策略
["choose"]={
switch=function()
local posx,posy
posx,posy=readFile("E:\\work\\SOM\\Team\\user_skills\\target_pos.txt")
if (CBall2PointDist(posx,posy)<150) then
return "GetBall1"
else
return "GetBall2"
end
end,
Kicker = task.GotoPos("Kicker",Kicker_x,Kicker_y,0),
Receiver=task.GotoPos("Receiver",R_x,R_y,Receiverdir),
Goalie=task.GotoPos("Goalie",1000,1000,0),
},
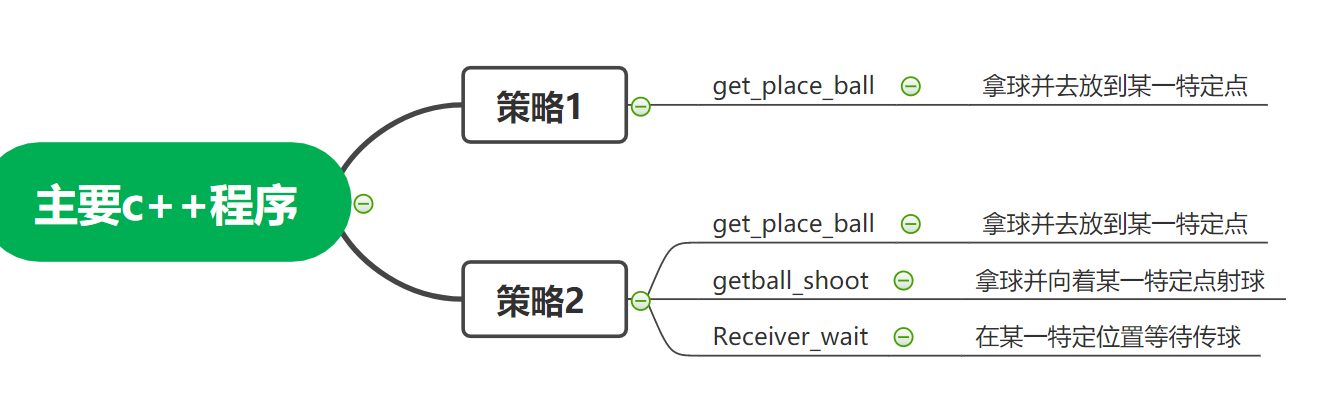
--策略1,直接去拿球,其他不动或离开。
["GetBall1"] = {
switch = function()
end,
Kicker = task.GotoPos("Kicker",Kicker_x,Kicker_y,1.5),
Receiver=task.ReceiverTask("get_place_ball"),
Goalie=task.GotoPos("Goalie",1000,1000,0),
},
--策略2,一个去踢球,一个准备接球。
["GetBall2"] = {
switch = function()
--判断是否踢球了,本且是否是真踢球,没有获取球速的函数,所以用距离判断是否真踢球
if CIsBallKick("Kicker") and CBall2RoleDist("Kicker")>30 then
return "PlaceBall"
end
end,
Kicker = task.KickerTask("getball_shoot"),
Receiver=task.ReceiverTask("Receiver_wait"),
Goalie=task.GotoPos("Goalie",1000,1000,0),
},
--策略2,接到球之后,再放球。
["PlaceBall"] = {
switch = function()
end,
Kicker = task.GotoPos("Kicker",Kicker_x,Kicker_y,1.5),
Receiver = task.ReceiverTask("get_place_ball"),
Goalie=task.GotoPos("Goalie",1000,1000,0),
},
name = "myBall"
}
c++层
#include "PlayerTask.h"
#include "worldmodel.h" //相关的全局参量包
#include "maths.h" // 相关的计算函数包
#include "util.h" // 相关的有用的工具头文件
#include "constants.h" // 相关的有用常量
#include <fstream>
#include <iostream>
#include <windows.h>
using namespace std;
extern "C"_declspec(dllexport)PlayerTask player_plan(const WorldModel *model, int robot_id);
namespace
{ //实地测试得出
float head_len = 7;
double miss = 11; //越大接球条件越宽松
float getangle = PI / 20;
#define fast_pass 9
}
bool is_getball(const point2f &ball, const point2f &runner)
{
//miss参数需要在比赛时实地调试
bool get_ball = (ball - runner).length() < miss;
if (get_ball)
{
return true;
}
else
{
return false;
}
}
//判断朝向角度是否符合
bool is_right_angle(const point2f &passer, float passer_dir, const point2f &target)
{
float target_to_passer = (target - passer).angle();
//两个矢量角度之差小于某个值,判断是否可以传球
bool pass;
pass = fabs(target_to_passer - passer_dir) < 0.4;
return pass;
}
PlayerTask player_plan(const WorldModel *model, int robot_id)
{
PlayerTask task;
const point2f &ball = model->get_ball_pos();
const point2f &ball_val = model->get_ball_vel();
const point2f &runner = model->get_our_player_pos(robot_id);
const point2f &runner_val = model->get_our_player_v(robot_id);
//ball_totalV球的总速度
double ball_totalV = sqrt(ball_val.x * ball_val.x + ball_val.y * ball_val.y);
const point2f& placePos = model->get_place_pos();
float dir = model->get_our_player_dir(robot_id);
ifstream inputx("E:\\work\\SOM\\Team\\user_skills\\target_pos.txt", ios::in);
double x, y;
inputx >> x >> y;
//point2f pos = placePos;
point2f pos(x, y);//目标放球点
//车到目标点的方向
float runner_to_pos_dir = (pos - runner).angle();
float ball_to_pos_dir = (pos - ball).angle();
float rece_to_ball = (ball - pos).angle();
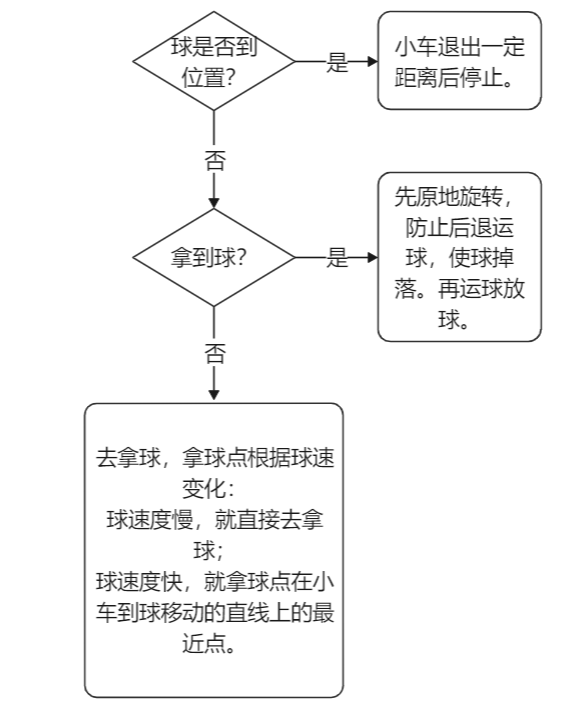
//----------------------------球是否到目标点(距离小于7),并且速度小于40,没到就执行一大堆拿球和放球-----------
if ((ball - pos).length() < 7 && ball_totalV < 40 )
{
task.needCb = false;//关闭吸球
Sleep(50);//延迟一下,为了彻底关闭吸球,防止电机停止的比较慢
task.orientate = dir;//角度不变
//是否已经退出球的范围区,如果距离小于30,就一点一点退出,否则停止
if (runner.dist(pos) < 30){
task.target_pos = runner + Maths::vector2polar(-10, runner_to_pos_dir);
}
else{
task.target_pos = runner;
}
}
else
{
//是否拿到球,并且朝向目标位置方向(防止运球时会掉球)
if (is_getball(ball, runner) && is_right_angle(runner, dir, pos))
{
//-----------------------开始运球到点--------------
//一点一点移动,move_buff来修改,先走的快后走的慢
double move_buff = 5;
if ((ball - pos).length() < 15){
move_buff = 1;
}
else if ((ball - pos).length() < 80){
move_buff = 10;
}
else{
move_buff = 15;
}
task.orientate = ball_to_pos_dir;
task.needCb = true;
task.target_pos = runner + Maths::vector2polar(move_buff, ball_to_pos_dir);
}
//没有拿到球,或者朝向目标不对
else{
//-----------------------------控制角度部分---------------------------------
//拿到球就开始转到目标朝向
if (is_getball(ball, runner))
{
//--------------根据球的位置决定转球方向----------------------
//buff控制转动快慢,buff可以改变
float buff = 0.4;
if (abs(dir - runner_to_pos_dir) < PI / 6)
{
buff = 0.1;
}
if (abs(dir - runner_to_pos_dir) < PI / 7)
{
buff = 0.05;
}
//buff取负号来判断不同情况
if (dir < runner_to_pos_dir)
{
buff = -buff;
}
//向左转或右转
if (abs(dir - runner_to_pos_dir) < PI)
{
task.orientate = dir - buff;
}
else
{
task.orientate = dir + buff;
}
//--------------------------转球结束--------------------
}
//没拿到球,就朝向球的方向
else
{
task.orientate = (ball - runner).angle();
}
//task.target_pos = runner;
task.needCb = true;
//----------------以下开始为控制跑点位置--------------------
//拿到球并且朝向有大问题,就开始原地旋转,防止小球掉落
if (is_getball(ball, runner) && is_right_angle(runner, dir, pos) == false)
{
task.target_pos = runner;
}
else if (is_getball(ball,runner)){
//拿到球并且角度没问题,这里不处理,因为上面已经处理过了
}
else
{
//计算出球运动方向和小车最短距离的交点。
double k = ball_val.y / ball_val.x;
double target_x = (runner.x / k + runner.y + k*ball.x - ball.y) / (k + 1 / k);
double target_y = ball_val.y / ball_val.x*(target_x - ball.x) + ball.y;
//------------------------------根据球速来控制跑点位置----------------------------
//球速小于100时,直接去拿球
if (ball_totalV < 60)
{
if ((ball - runner).length()<50){
task.target_pos = runner + Maths::vector2polar((ball - runner).length()*0.6, (ball - runner).angle());
}
else{
task.target_pos = ball;
}
} //球速大于100时,前往球的位置,加上球速*0.5在球运动方向上的偏移
else if (ball_totalV > 400)
{
task.target_pos.x = target_x;
task.target_pos.y = target_y;
}
else
{
point2f new_target = ball + Maths::vector2polar(ball_totalV * 0.1, ball_val.angle());
task.target_pos.x = target_x;
task.target_pos.y = target_y;
}
}
}
}
return task;
}
#include "PlayerTask.h"
#include "worldmodel.h" //相关的全局参量包
#include "maths.h" // 相关的计算函数包
#include "util.h" // 相关的有用的工具头文件
#include "constants.h" // 相关的有用常量
#include <fstream>
#include <iostream>
#include <windows.h>
using namespace std;
extern "C"_declspec(dllexport)PlayerTask player_plan(const WorldModel *model, int robot_id);
namespace
{ //实地测试得出
float head_len = 7;
double miss = 11; //越大接球条件越宽松
float getangle = PI / 20;
#define fast_pass 9
}
bool is_getball(const point2f &ball, const point2f &runner)
{
//miss参数需要在比赛时实地调试
bool get_ball = (ball - runner).length() < miss;
if (get_ball)
{
return true;
}
else
{
return false;
}
}
//判断朝向角度是否符合
bool is_right_angle(const point2f &passer, float passer_dir, const point2f &target,const double receiver_val)
{
float target_to_passer = (target - passer).angle();
//两个矢量角度之差小于某个值,判断是否可以传球,并且小车基本不移动,就说明准备好了。
bool pass;
pass = fabs(target_to_passer - passer_dir) < 0.07 && receiver_val<20;
return pass;
}
PlayerTask player_plan(const WorldModel *model, int robot_id)
{
PlayerTask task;
const point2f &ball = model->get_ball_pos();
const point2f &ball_val = model->get_ball_vel();
//const point2f ball(0,200);
const point2f &runner = model->get_our_player_pos(robot_id);
//const point2f &receiver = model->get_our_player_pos(1);
const point2f &runner_val = model->get_our_player_v(robot_id);
//const point2f &receiver_val = model->get_our_player_v(1);
//ball_totalV球的总速度
double ball_totalV = sqrt(ball_val.x * ball_val.x + ball_val.y * ball_val.y);
const int get_buff = 100;
float dir = model->get_our_player_dir(robot_id);
ifstream inputx("E:\\work\\SOM\\Team\\user_skills\\target_pos.txt", ios::in);
double x, y;
inputx >> x >> y;
//point2f pos1(x, y);(-100,0)
point2f post(x, y);//目标放球点
//point2f post = model->get_place_pos();
double min = 10000;
//拿到接球人的id给receiver,遍历场上所有的车,寻找
const bool* exist_id = model->get_our_exist_id();
int receiverid;
for (int i = 0; i <= MAX_ROBOTS; i++){
if (exist_id[i]){
if (i != robot_id){
const point2f &temp = model->get_our_player_pos(i);
if (temp.dist(post) < min){
min = temp.dist(post);
receiverid = i;
}
}
}
}
const point2f &receiver = model->get_our_player_pos(receiverid);
const point2f &receiver_val = model->get_our_player_v(receiverid);
const double receiver_tval = sqrt(pow(receiver_val.x, 2) + pow(receiver_val.y, 2));
point2f pos = receiver;//目标踢球点
//车到目标点的方向
float runner_to_pos_dir = (pos - runner).angle();
float ball_to_pos_dir = (pos - ball).angle();
//以下参数由测试得出
float rece_to_ball = (ball - pos).angle();
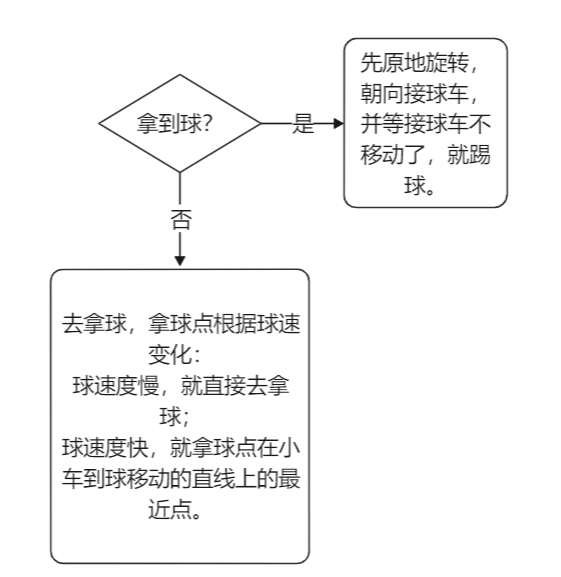
//是否拿到球,并且朝向目标位置,并且另一辆小车基本不动了。
if (is_getball(ball, runner) && is_right_angle(runner, dir, pos, receiver_tval))
{
task.orientate = dir;
//-----------------------开始踢球--------------
task.needKick = true;
task.orientate = dir;
task.flag = 0;
//射球力度根据测试修改
double k = 0.03;
if (receiver.dist(runner) > 450){
k = 0.01;
}
task.kickPower = k*receiver.dist(runner);
}
else{
//-----------------------------控制角度部分---------------------------------
if (is_getball(ball, runner))
{
//--------------根据球的位置决定转球方向----------------------
//buff控制转动快慢,buff可以改变
float buff = 0.4;
if (abs(dir - runner_to_pos_dir) < PI / 6)
{
buff = 0.1;
}
if (abs(dir - runner_to_pos_dir) < PI / 7)
{
buff = 0.05;
}
//buff取负号来判断不同情况
if (dir < runner_to_pos_dir)
{
buff = -buff;
}
//向左转或右转
if (abs(dir - runner_to_pos_dir) < PI)
{
task.orientate = dir - buff;
}
else
{
task.orientate = dir + buff;
}
//--------------------------转球结束--------------------
}
else
{
task.orientate = (ball - runner).angle();
}
task.needCb = true;
//----------------以下开始为控制跑点位置--------------------
//拿到球并且朝向有大问题,就开始原地旋转,防止小球掉落
if (is_getball(ball, runner) && is_right_angle(runner, dir, pos, receiver_tval) == false)
{
task.target_pos = runner;
}
else if (is_getball(ball, runner)){
//拿到球并且角度没问题,这里不处理,因为上面已经处理过了
}
else
{
//------------------------------根据球速来控制跑点位置----------------------------
//球速小于100时,直接去拿球
if (ball_totalV < 100)
{
if ((ball - runner).length()<50){
task.target_pos = runner + Maths::vector2polar((ball - runner).length()*0.6, (ball - runner).angle());
}
else{
task.target_pos = ball;
}
} //球速大于100时,前往球的位置,加上球速*0.5在球运动方向上的偏移
else if (ball_totalV > 400)
{
task.target_pos = ball + Maths::vector2polar(ball_totalV * 2, ball_val.angle());
}
else
{
task.target_pos = ball + Maths::vector2polar(ball_totalV * 0.5, ball_val.angle());
}
}
}
return task;
}
Receiver_wait.cpp
#include "PlayerTask.h"
#include "worldmodel.h" //相关的全局参量包
#include "maths.h" // 相关的计算函数包
#include "util.h" // 相关的有用的工具头文件
#include "constants.h" // 相关的有用常量
#include <fstream>
#include <iostream>
#include <windows.h>
using namespace std;
extern "C"_declspec(dllexport)PlayerTask player_plan(const WorldModel *model, int robot_id);
PlayerTask player_plan(const WorldModel *model, int robot_id)
{
PlayerTask task;
const point2f &ball = model->get_ball_pos();
const point2f &ball_val = model->get_ball_vel();
const point2f &runner = model->get_our_player_pos(robot_id);
float dir = model->get_our_player_dir(robot_id);
ifstream inputx("E:\\work\\SOM\\Team\\user_skills\\target_pos.txt", ios::in);
double x, y;
inputx >> x >> y;
point2f pos(x, y);//目标放球点
//point2f pos = model->get_place_pos();
//point2f pos1(300, -20);
float ball_to_pos_dir = (pos - ball).angle();
//车在目标点的位置上,再后退一定距离。朝向小球的方向
task.target_pos = pos + Maths::vector2polar(-35, ball_to_pos_dir);
task.orientate = (ball - runner).angle();
return task;
}