1 边缘检测原理
边缘检测的原理是:检测每个像素周围的像素亮度差,如果亮度差异较大,就将该像素识别为边缘,并进行边缘着色。
本文完整资源见→Unity3D边缘检测特效。
使用过卷积神经网络(CNN)的人,一定知道卷积运算,笔者之前有写过相关文章(使用CNN实现MNIST数据集分类、基于keras的卷积神经网络(CNN)、基于keras的时域卷积网络(TCN)、基于keras的胶囊网络(CapsNet)),感兴趣的读者可以了解下。
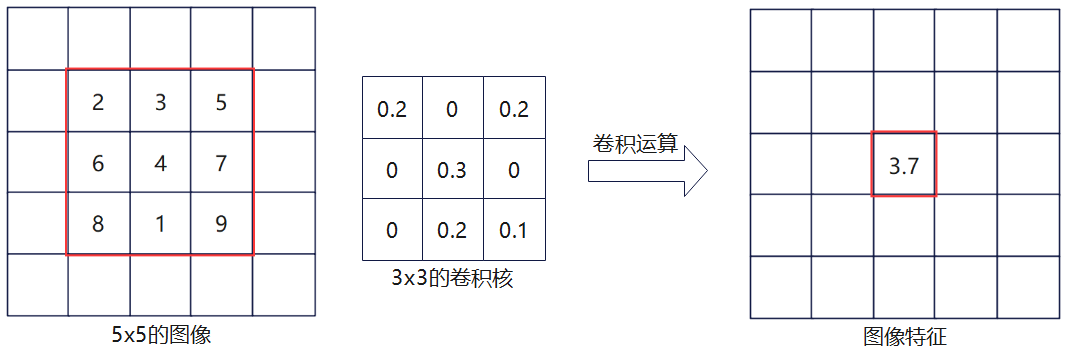
周围像素的亮度差异计算,也需要使用卷积运算。对于每个像素的周围像素,我们可以给它赋予一个权值,对这些像素的亮度进行加权求和,将该加权和记作该点的一个特征值,我们可以根据该特征值决策该点是否显示为边缘色。为方便描述上述运算,我们将周围像素的权值序列记作卷积核,将加权运算记作卷积运算。
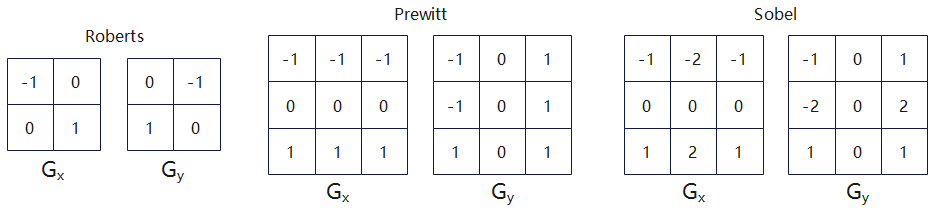
我们将可以描述周围像素点亮度差异的卷积核称为边缘检测算子,将使用边缘检测算子进行卷积运算得到的特征值称为梯度(记为G)。常用的边缘检测算子有 Roberts、Prewitt、Sobel,如下,它们都有两个方向上的梯度 Gx、Gy。
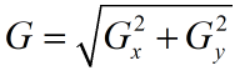
整体梯度可以按以下公式计算得到:
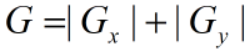
由于上述计算包含了开根号操作,出于性能考虑,我们使用绝对值操作代替开根号操作:
得到梯度后,就可以判断哪些像素对应了边缘(梯度越大,越有可能是边缘点)。
2 代码实现
EdgeDetection.cs
using UnityEngine;
[RequireComponent(typeof(Camera))] // 需要相机组件
public class EdgeDetection : MonoBehaviour {
[Range(0.0f, 1.0f)]
public float edgesOnly = 0.0f; // 是否仅显示边缘
public Color edgeColor = Color.black; // 边缘颜色
public Color backgroundColor = Color.white; // 背景颜色
private Material material; // 材质
private void Start() {
material = new Material(Shader.Find("MyShader/EdgeDetect"));
material.hideFlags = HideFlags.DontSave;
}
void OnRenderImage(RenderTexture src, RenderTexture dest) {
if (material != null) {
material.SetFloat("_EdgeOnly", edgesOnly);
material.SetColor("_EdgeColor", edgeColor);
material.SetColor("_BackgroundColor", backgroundColor);
Graphics.Blit(src, dest, material);
} else {
Graphics.Blit(src, dest);
}
}
}
EdgeDetection.shader
Shader "MyShader/EdgeDetect" {
Properties {
_MainTex ("Base (RGB)", 2D) = "white" {} // 主纹理
_EdgeOnly ("Edge Only", Float) = 1.0 // 是否仅显示边缘
_EdgeColor ("Edge Color", Color) = (0, 0, 0, 1) // 边缘颜色
_BackgroundColor ("Background Color", Color) = (1, 1, 1, 1) // 背景颜色
}
SubShader {
Pass {
// 深度测试始终通过, 关闭深度写入
ZTest Always ZWrite Off
CGPROGRAM
#include "UnityCG.cginc"
#pragma vertex vert
#pragma fragment frag
sampler2D _MainTex; // 主纹理
uniform half4 _MainTex_TexelSize; // _MainTex的像素尺寸大小, float4(1/width, 1/height, width, height)
fixed _EdgeOnly; // 是否仅显示边缘
fixed4 _EdgeColor; // 边缘颜色
fixed4 _BackgroundColor; // 背景颜色
struct v2f {
float4 pos : SV_POSITION; // 裁剪空间中顶点坐标
half2 uv[9] : TEXCOORD0; // 顶点及其周围8个点的uv坐标
};
v2f vert(appdata_img v) {
v2f o;
o.pos = UnityObjectToClipPos(v.vertex); // 模型空间顶点坐标变换到裁剪空间, 等价于: mul(UNITY_MATRIX_MVP, v.vertex)
half2 uv = v.texcoord;
o.uv[0] = uv + _MainTex_TexelSize.xy * half2(-1, -1);
o.uv[1] = uv + _MainTex_TexelSize.xy * half2(0, -1);
o.uv[2] = uv + _MainTex_TexelSize.xy * half2(1, -1);
o.uv[3] = uv + _MainTex_TexelSize.xy * half2(-1, 0);
o.uv[4] = uv + _MainTex_TexelSize.xy * half2(0, 0);
o.uv[5] = uv + _MainTex_TexelSize.xy * half2(1, 0);
o.uv[6] = uv + _MainTex_TexelSize.xy * half2(-1, 1);
o.uv[7] = uv + _MainTex_TexelSize.xy * half2(0, 1);
o.uv[8] = uv + _MainTex_TexelSize.xy * half2(1, 1);
return o;
}
fixed luminance(fixed4 color) { // 计算亮度, 以亮度作为梯度计算的参考量
return 0.2125 * color.r + 0.7154 * color.g + 0.0721 * color.b;
}
half Sobel(v2f i) { // 使用Sobel边缘检测算子做卷积运算, 计算梯度
const half Gx[9] = {-1, 0, 1, -2, 0, 2, -1, 0, 1};
const half Gy[9] = {-1, -2, -1, 0, 0, 0, 1, 2, 1};
half lum;
half Ex = 0;
half Ey = 0;
for (int j = 0; j < 9; j++) {
lum = luminance(tex2D(_MainTex, i.uv[j]));
Ex += lum * Gx[j];
Ey += lum * Gy[j];
}
half E = 1 - abs(Ex) - abs(Ey);
return E;
}
fixed4 frag(v2f i) : SV_Target {
half edge = Sobel(i);
fixed4 withEdgeColor = lerp(_EdgeColor, tex2D(_MainTex, i.uv[4]), edge); // 边缘颜色与原图颜色插值
fixed4 onlyEdgeColor = lerp(_EdgeColor, _BackgroundColor, edge); // 边缘颜色与背景颜色插值
return lerp(withEdgeColor, onlyEdgeColor, _EdgeOnly);
}
ENDCG
}
}
FallBack Off
}
3 运行效果
1)原图

2)Edges Only 设置为 0,Edge Color 设置为绿色

3)Edges Only 设置为 1,Edge Color 设置为黑色,Background Color 设置为白色
声明:本文转自【Unity3D】边缘检测特效。
标签:Unity3D,MainTex,特效,Color,检测,uv,half2,边缘,TexelSize From: https://www.cnblogs.com/zhyan8/p/17615596.html