1 分类
1.1 机械
机械 机器和机构的统称。
这两者在结构和运动方面无区别,不同主要在于能量方面,并且机器常含有其他装置:如液压装置等等等等。
1.2 机器
机器 机器是执行机械运动的装置,用来变换传输能量、物料、信息。
机器的主体部分是由机构组成的,一部机器可包含一个或若干个机构。
1.2.1 用途分类
- 原动机 将其他形式的能转化为机械能的机器,如内燃机,电动机。
- 工作机 使用机械能来变换传输能量、物料信息的机器。
1.2.2 组成部分
动力部分、传动部分、控制部分、执行部分
1.2.3 三个特征
其满足三个特征:①人造实物的组合体②具有确定的相对运动③包含动力装置,可以进行能量的转化。(机构只满足前两个)
1.3 机构
机构是由构件组成的,具有确定相对运动的人为实物的组合体。
- 构件 构件是由若干零件组成的,机构中独立运动的刚体,是最小的运动单元。
- 零件 最小的加工制造单元
2 本课程内容
概览
- 机构组成 结构分析
- 理论力学 运动受力分析
- 材料力学 强度和刚度分析
- 加工装配分析
考试范围
1,2,3,4,5 10,11 13,14 16,17
3 平面机构的自由度和速度分析
如果组成机构的所有构件都在同一平面或相互平行的平面内运动(三个自由度),则这种机构称为平面机构.否则称为空间机构。本书主要研究平面构件。下面介绍构件之间的连接:
3.1 运动副
运动副 机构中两构件直接接触并能够有一定的相对运动的连接。
运动副元素 连接的形状,有点、线、面
根据其连接形状(接触应力),可以将运动副分为低副(应力低,面)和高副(应力高,点线)
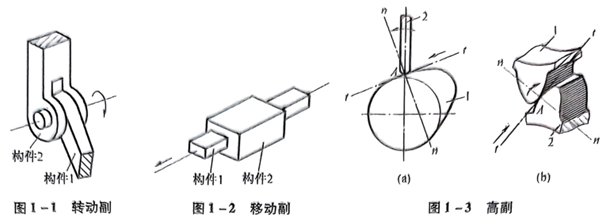
3.1.1 低副
- 转动副 若组成运动副的两构件只能在某一平面内相对转动
- 移动副 组成运动副的两构件只能沿着某一轴线相对移动
3.1.2 高副
- 齿轮副 图1.3(b)
- 凸轮副 图1.3(a)
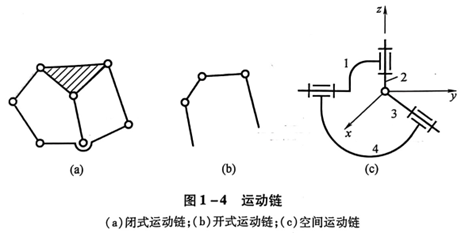
3.2 运动链
构件通过运动副连接形成的相对可动的系统称为运动链。根据运动是否封闭,运动链可分为闭式运动链(图1-4(a))和开式运动链(图1-4(b))两类。
3.3 机构
机构 具有确定运动的运动链。
机架 作为参考系的构件,可以将参考坐标与之固连。Only One 不可动构件。
原动件 原动件又称为主动件或输入构件,它的运动和动力由该机构之外的构件或动力源提供
从动件 其余可动构件。
3.4 图
机构运动简图 不考虑机构中与运动无关的因素,仅用简单的线条和规定的符号来代表件和运动副,并按一定的比例表示各运动副的相对位置,这种图能够准确表达机构运动特性。
机构示意图 仅以构件和运动副的符号表示机构,其图形不按精确例绘制,而着重表达机构的结构特征。