在数学上,高斯噪声是一种通过向输入数据添加均值为零和标准差(σ)的正态分布随机值而产生的噪声。 正态分布,也称为高斯分布,是一种连续概率分布,由其概率密度函数 (PDF) 定义:
pdf(x) = (1/ (σ*sqrt(2*π))) *e^(- (x—μ)²/ (2*σ²))
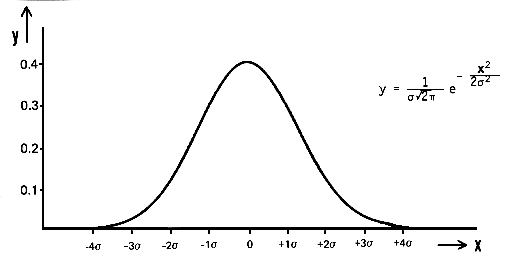
其中 x 是随机变量,μ 是均值,σ 是标准差。
完整文章:
https://avoid.overfit.cn/post/828b65b5323f45d3b54e39117f93ff31
标签:高斯,均值,噪声,标准差,深度,正态分布 From: https://www.cnblogs.com/deephub/p/17062513.html