网站首页
编程语言
数据库
系统相关
其他分享
编程问答
首页
>
编程语言
>FANCU机器人夹爪安装程序
FANCU机器人夹爪安装程序
时间:2024-06-12 20:32:53
浏览次数:25
标签:
FANCU
钢珠
机器人
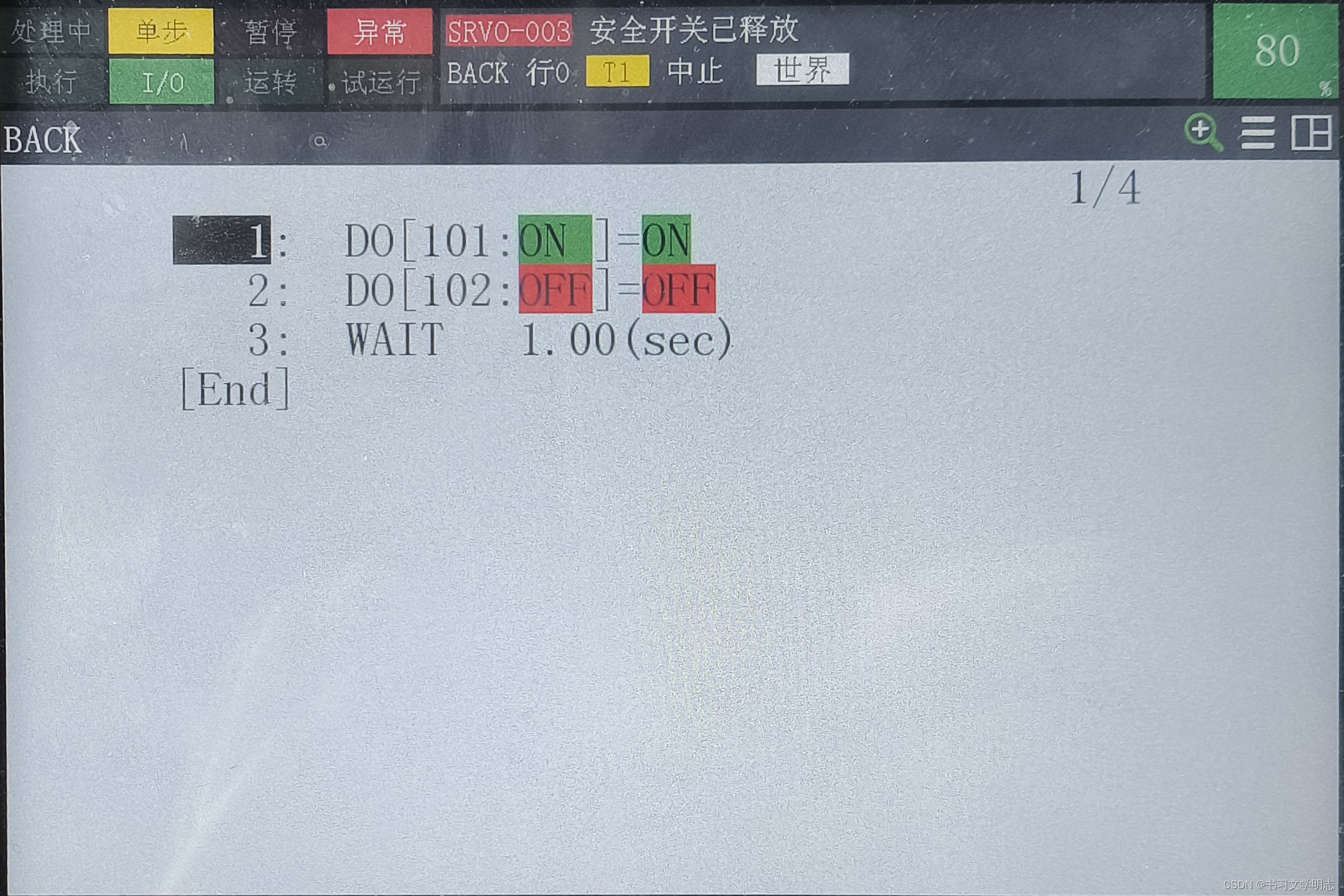
BACK
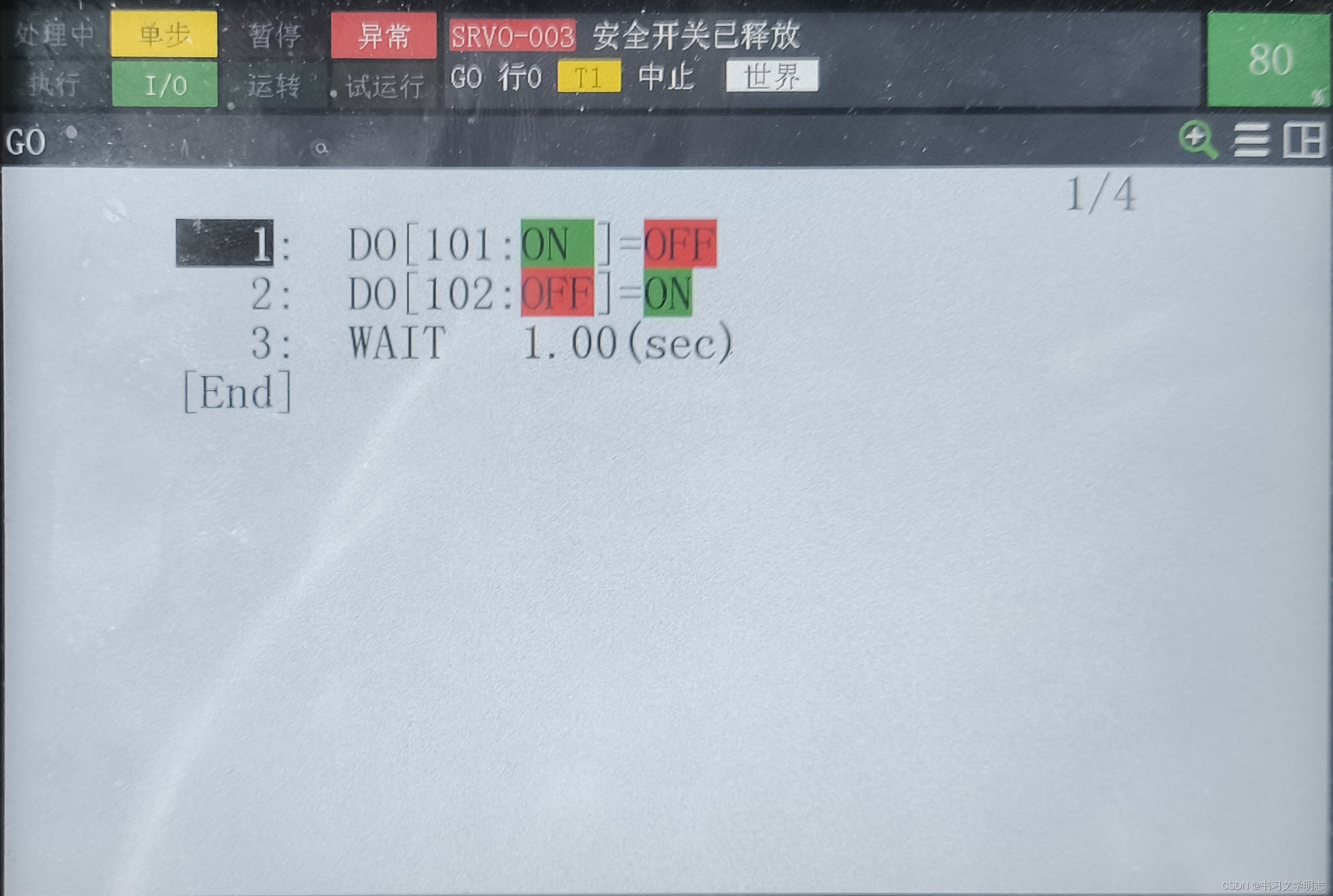
GO
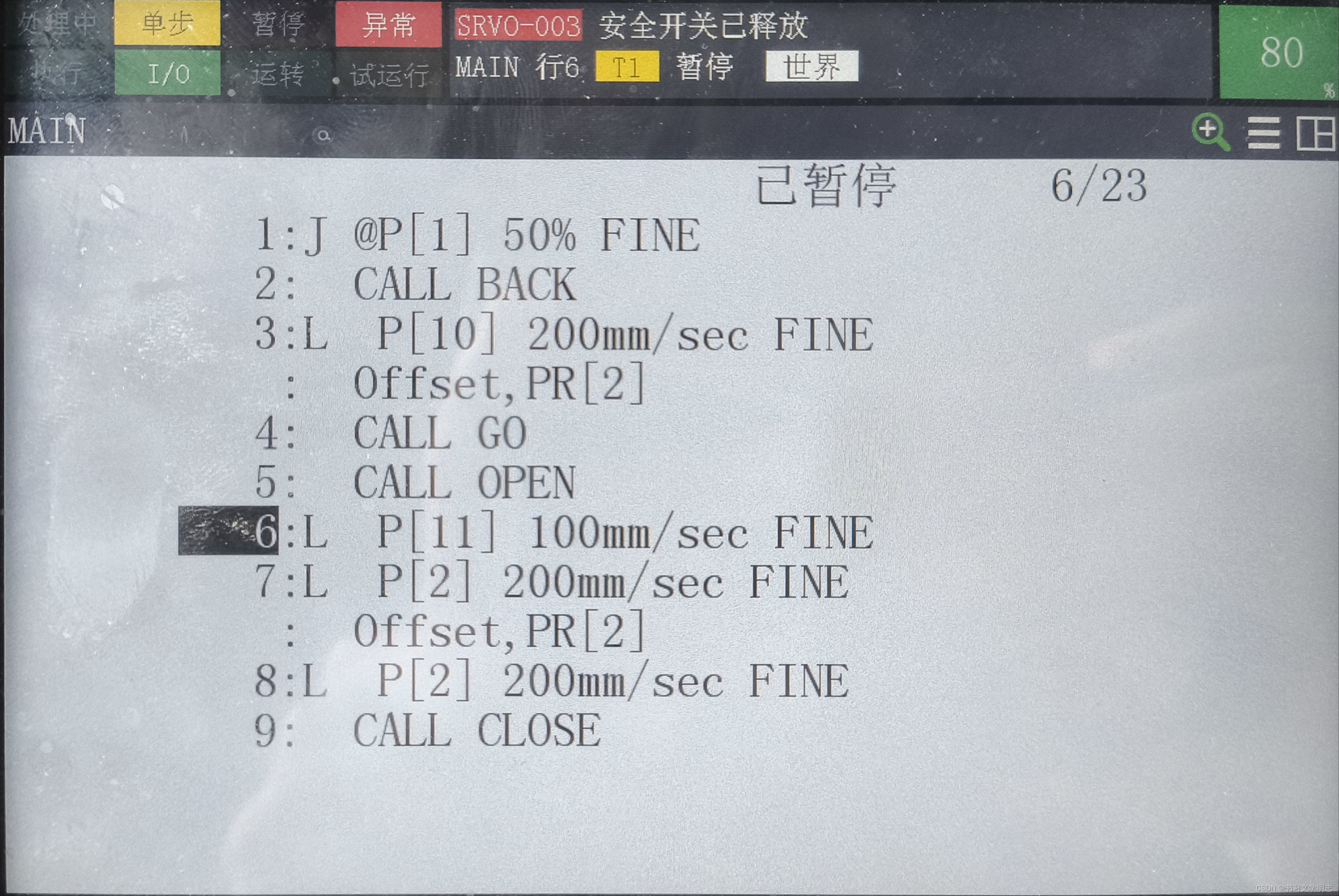
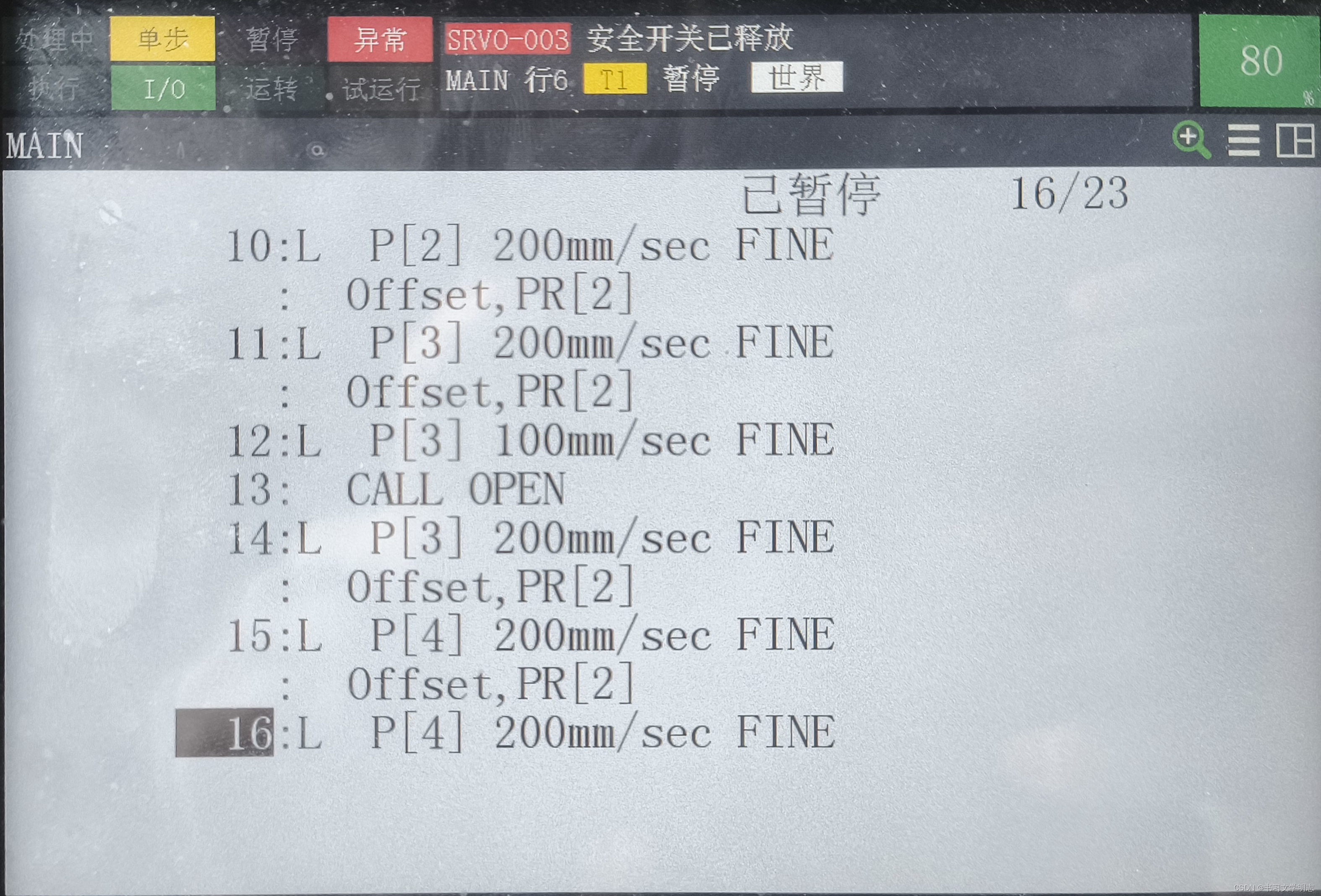
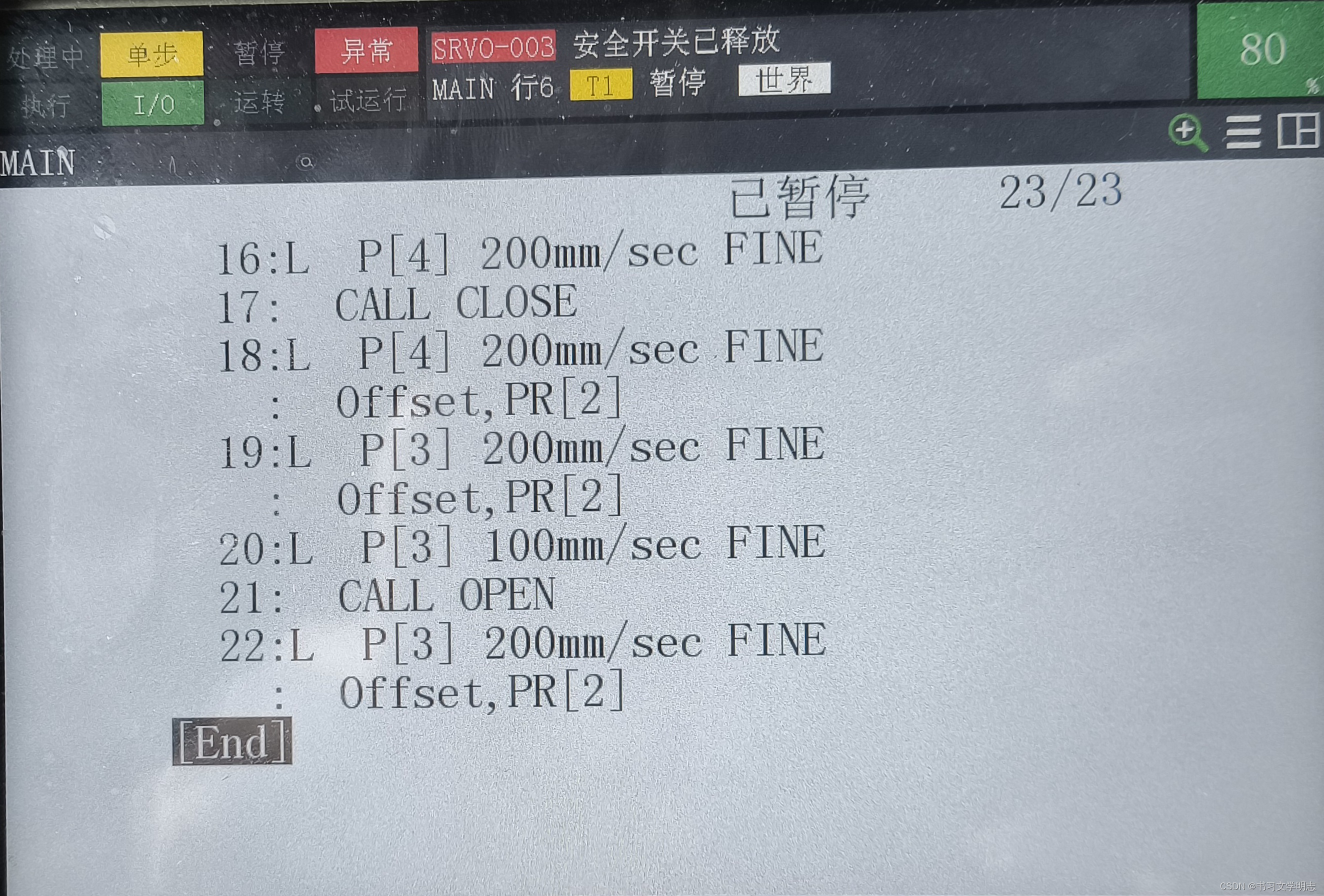
安装程序
子程序
main
调用子程序
GO 钢珠弹出
BACK 钢珠缩回
标签:
FANCU
,
钢珠
,
机器人
,
BACK
,
GO
,
安装程序
,
子程序
From: https://blog.csdn.net/2303_77130813/article/details/139635282
相关文章
飞书golang 发送机器人结构定义
飞书golang发送机器人结构定义在Golang中,可以定义一个结构体来表示飞书(Feishu)机器人的数据。以下是一个简单的示例,展示了如何定义用于发送消息到飞书机器人的结构体: packagemain import("bytes""encoding/json""fmt""net/http") //FeishuRobotPayl......
斯坦福大学Mobile ALOHA——一款革命性的家政机器人
https://www.bilibili.com/video/BV1nT421e7Cy/?spm_id_from=333.999.0.0随着社会老龄化问题的加剧,家政机器人成为了解决日常生活辅助需求的新方向。欢迎来了解MobileAloha家政机器人的技术原理和潜力——它将把你的家务活变成轻而易举的事。推动这款机器人功能的技术特点包......
工业机器人远程运维,增强智慧工厂运营管理
1、需求背景随着工业自动化技术的普及和工业机器人应用的增加,制造业对于生产线稳定性和效率的要求不断提高。然而,传统的现场监控方式存在着地理位置限制、实时监控难度大以及诊断能力有限等问题,迫切需要一种更具灵活性和效率的监控方式。实时监控与数据收集工厂希望能够通过......
RPA-UiBot6.0数据整理机器人—杂乱数据秒变报表
前言 友友们是否常常因为杂乱的数据而烦恼?数据分类、排序、筛选这些繁琐的任务是否占据了友友们的大部分时间?这篇博客将为友友们带来一个新的解决方案,让我们共同学习如何运用RPA数据整理机器人,实现杂乱数据的快速整理,为你的工作减负增效! 在这里,友友......
【栈】2751. 机器人碰撞
本文涉及知识点栈LeetCode2751.机器人碰撞现有n个机器人,编号从1开始,每个机器人包含在路线上的位置、健康度和移动方向。给你下标从0开始的两个整数数组positions、healths和一个字符串directions(directions[i]为‘L’表示向左或‘R’表示向右)。posit......
【无人机控制】基于PID的四轮麦克纳姆移动机器人控制系统的研究与实现附matlab复现
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。......
机器人位姿描述
机器人的位姿描述与坐标变换是进行工业机器人运动学和动力学分析的基础。本节简要介绍上述内容,明确位姿描述和坐标变换的关系,用到的基本数学知识就是——矩阵。1位姿表示位姿代表位置和姿态。任何一个刚体在空间坐标系(OXYZ)中可以用位置和姿态来精确、唯一表示其位置状态。......
【论文解读】针对机器人技术的大模型
1、简要介绍 大型语言模型(LLM)经历了显著的发展,并越来越多地跨各个领域集成。值得注意的是,在机器人任务规划领域,LLM利用其先进的推理和语言理解能力,基于自然语言指令制定精确和高效的行动规划。然而,对于机器人与复杂环境交互的具体化任务,由于与机器人视觉感知缺乏......
Bug-QQ机器人
Bug-QQ机器人基于YesRotgo-cqhttp,使用OneBot标准的插件感谢@Go-CQHTTP-YesBot项目,这个项目的大框架都是基于YesBot完成的。在YesBot上的修改修改群聊天方式,不需要@修改端口监听为websocket(原始方式在我的服务器上出现端口占用问题)加入一点新功能调整s......
机器人足球-自动放球
策略选择-这部分放在lua层-myball.luac++层的内容lua层--desc:Kicker_x=function() returnCOurRole_x("Kicker")endKicker_y=function() returnCOurRole_y("Kicker")endR_x=function() returnCOurRole_x("Receiver")endR_y=functi......
赞助商
阅读排行
Python3网络爬虫浓缩系列
visual studio 2022离线安装包制作教程
#yyds干货盘点# 前端歌谣的刷题之路-第一百三十七题-可伸缩属性
Codeforces
使用U盘制作启动盘并重装系统
编写HelloWorld程序
departments/components/add.vue
1081. 度的数量
js- day03- 将数据变成柱形图
nginx使用
leetcode 22 括号生成
webrtc-streamer实现简单rtsp视频监控
wordpress外贸独立站商城 如此简单
函数练习错题
利用TableAdapter更新数据库