直接转矩控制(Direct Torque Control,DTC)是一种用于交流电动机(特别是异步电动机和永磁同步电动机)的高性能控制策略。
 与磁场定向控制(FOC)不同,DTC不依赖于复杂的坐标变换和电流闭环控制,而是直接控制电动机的转矩和磁通,因此具有以下特点:
与磁场定向控制(FOC)不同,DTC不依赖于复杂的坐标变换和电流闭环控制,而是直接控制电动机的转矩和磁通,因此具有以下特点:
- 简单的结构和快速动态响应
- 不需要复杂的坐标变换
- 对参数变化不敏感
- 适用于高速和低速运行
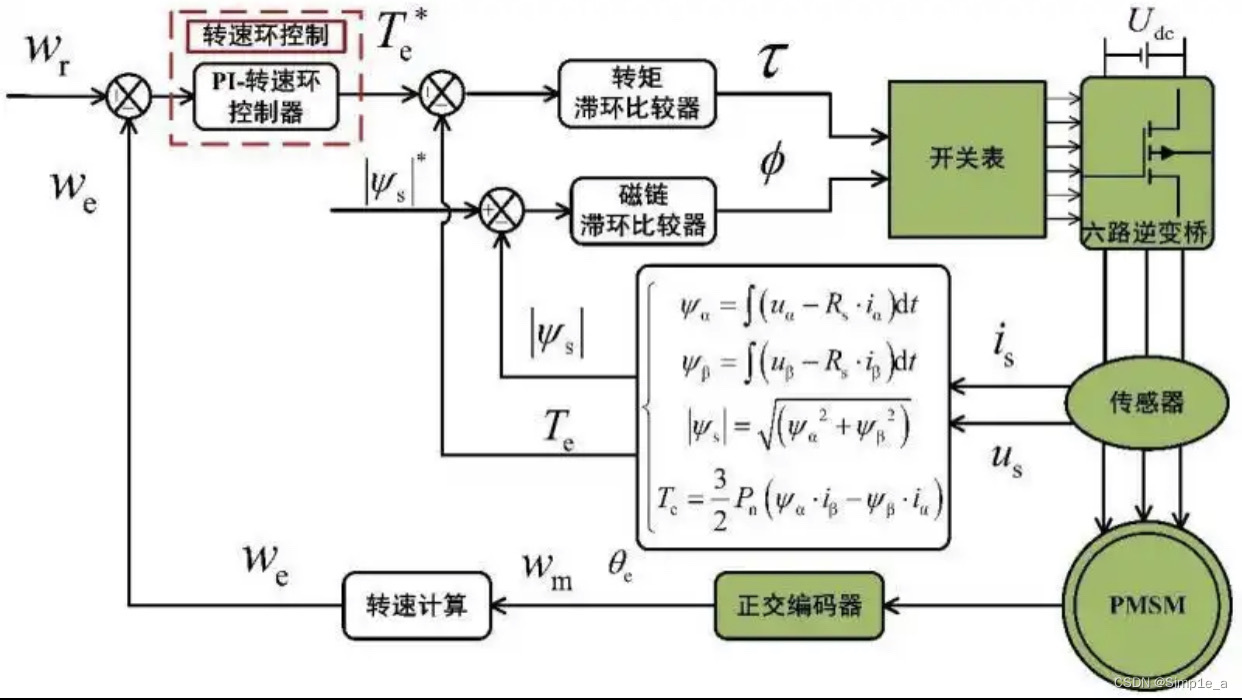
以下是直接转矩控制策略的基本原理和步骤:
1. 控制原理
直接转矩控制的基本思想是通过选择适当的电压矢量来直接控制电动机的磁通和转矩。电压矢量的选择基于以下两个基本原则:
- 磁通控制:通过选择合适的电压矢量来控制定子磁通的大小。
- 转矩控制:通过选择合适的电压矢量来控制电动机的转矩。
2. 控制步骤
2.1 电流和电压采样
- 采样电动机的定子电流和电压,用于计算实际的转矩和磁通。
2.2 磁通和转矩估算
- 使用电动机模型估算定子磁通和转矩的实际值。
- 磁通估算通常基于定子电流和电压的模型。
- 转矩估算基于定子磁通和电流的模型。
2.3 磁通和转矩调节
- 将估算的磁通和转矩与参考值进行比较。
- 使用滞环控制器(Hysteresis Controller)来调节磁通和转矩。滞环控制器具有两个阈值,用于决定何时切换电压矢量。
2.4 电压矢量的选择
- 根据磁通和转矩的误差以及电动机的运行状态,从预定义的电压矢量中选择合适的电压矢量。
- 电压矢量通常由逆变器的开关状态决定,逆变器可以产生多个不同的电压矢量。
2.5 逆变器控制
- 将选择的电压矢量转换为逆变器的开关信号,以驱动电动机。
3. 直接转矩控制的特点
- 快速动态响应:由于直接控制转矩和磁通,DTC可以实现快速的动态响应。
- 简单的控制结构:不需要复杂的坐标变换和多个PI控制器。
- 对参数变化不敏感:由于直接控制转矩和磁通,DTC对电动机参数的变化不敏感。
- 适用于宽速度范围:DTC适用于电动机的宽速度范围,包括低速和高速运行。