根据百度百科,动态规划是运筹学的一个分支,是求解决策过程最优化的一个过程。本篇文章主要包含了其使用的三个前提条件(最优子结构,重叠子问题,无后效性)的理解,及通过编程解决一些简单问题过程中相关数组的构建,递推方程的求解,初值的定义。由于个人问题能力所限,对于动态规划问题的理解可能还不够深入,欢迎指出问题!
实例:超级楼梯问题
- 原题链接:Problem - 2041 (hdu.edu.cn)
- 题面:有一楼梯共M级,刚开始时你在第一级,若每次只能跨上一级或二级,要走上第M级,共有多少种走法?
- 分析:斐波那契数列套皮
前提
-
无后效性
-
简析:前面的状态不会影响后面的状态
-
与迷宫问题比较:
-
超级楼梯问题:无论到第N(N<M)级楼梯是怎么走的,总是能到达第M级楼梯
-
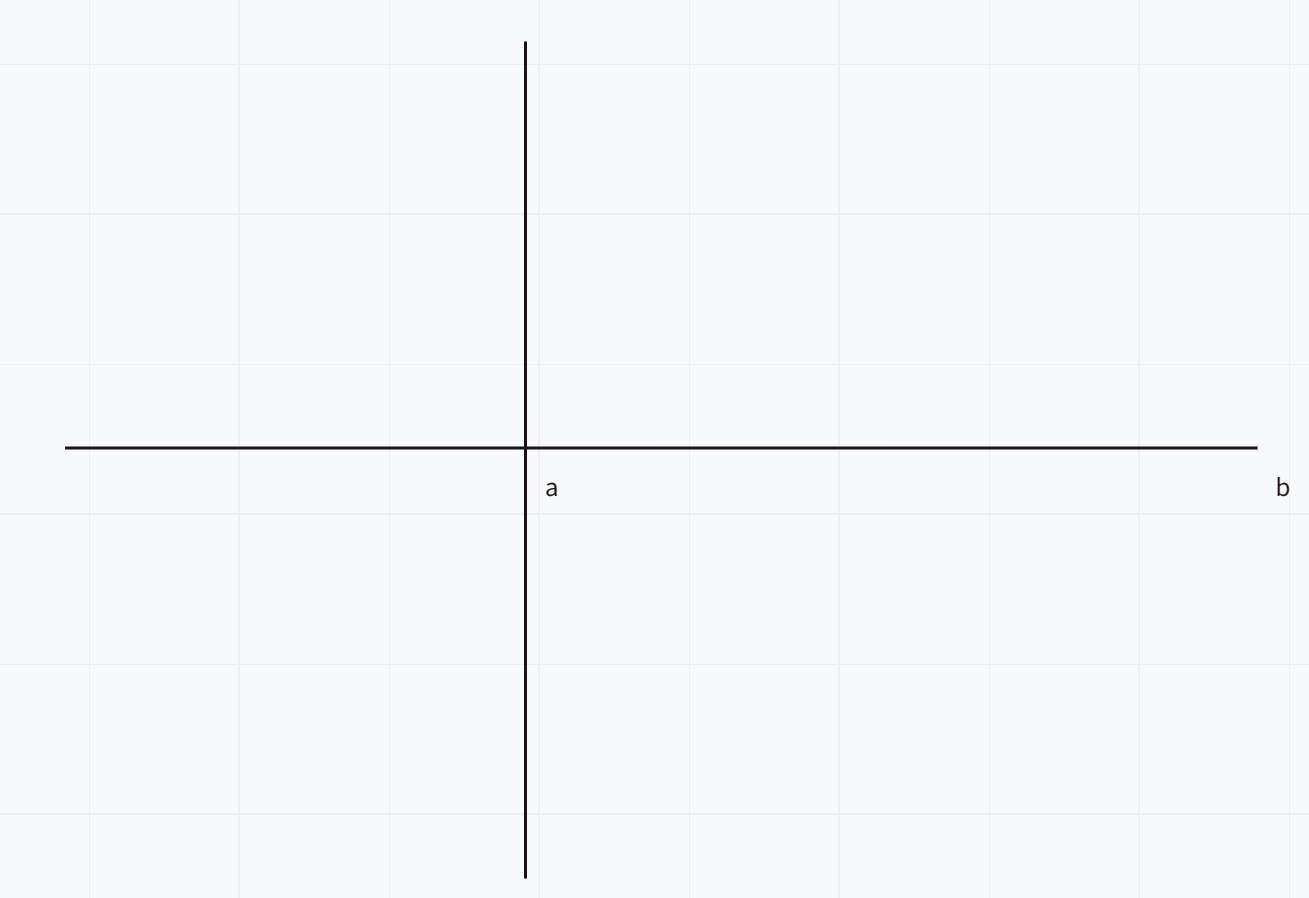
迷宫问题:假设我们求从迷宫的起点a到终点b的最短路径,显然有迷宫的起点a选择的第一个方向会直接影响是否能到达b地点,即有后效性
-
-
无后效性转为有后效性:增加维数
注:见HDU 2045:不容易系列之(3)—— LELE的RPG难题(动态规划) - Arno_vc - 博客园 (cnblogs.com),本质是修改动态规划求解的命题,最后通过分类讨论获得自己想要的解
-
-
最优子结构
-
简析:设目标问题为A,子问题为\(B_n\),且\(A=f(B_1,...,B_n)\),要求目标问题A的最优解,只需求子问题\(B_1,...,B_n\)的最优解
以超级楼梯问题为例,目标问题为A:到达第M级楼梯,可分解为两个子问题
- \(B_1:\)从第M-1级楼梯跨1级台阶
- \(B_2:\)从第M-2级楼梯跨2级台阶
故有\(A=f(B_1,B_2)=B_1+B_2\)
注:函数\(f\)通常为相加,求最大值或最小值
-
无法划分为最优子结构的问题
-
以无权有向图求最长边为例
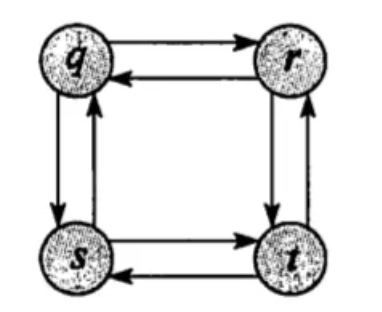
- 目标问题:q到t的最长边为\(q => r => t\)
- 子问题:若为最优子结构有q到r的最长边为\(q => r\),但实际上q到r的最长边为\(q => s => t => r\)
- 总结,该问题不满足最优子结构
-
-
重叠子问题
-
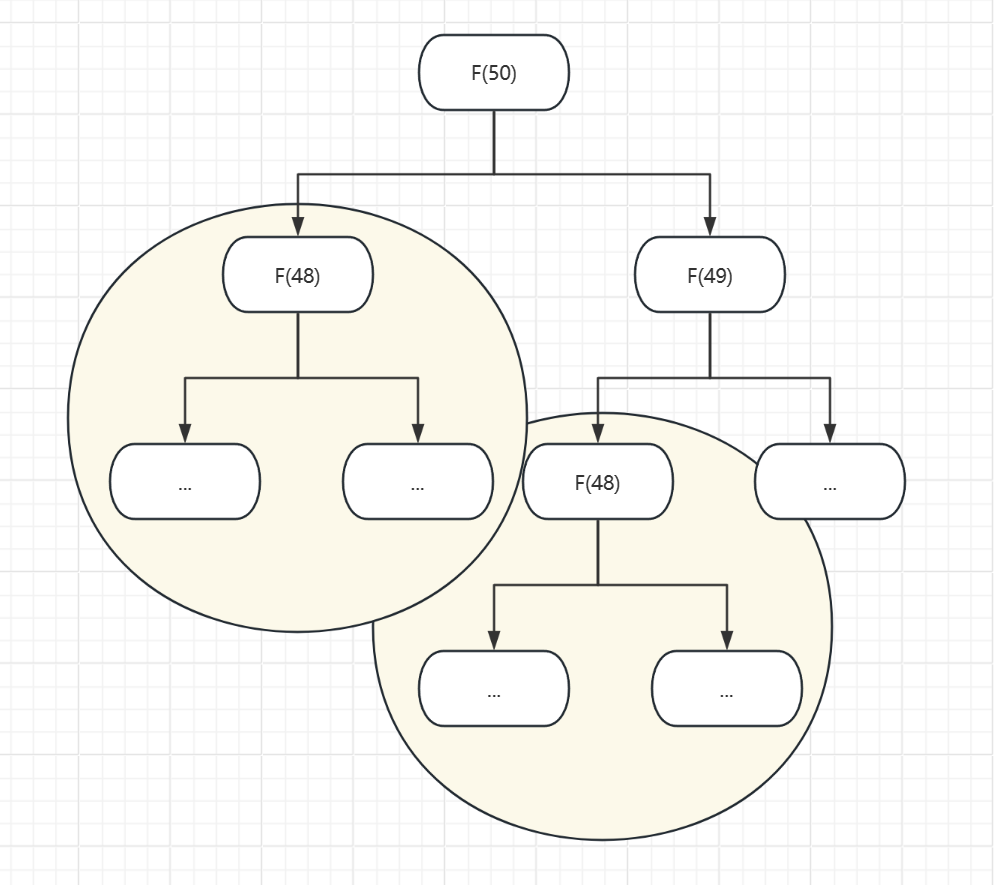
从数学建模问题的角度,超级楼梯问题本质上是个斐波那契数列问题,可以看到在对于\(F(50)\)的计算过程中,\(F(48)\)有两次的重复计算。实际上,越下层的重复计算越多
-
采用递归方式进行计算:计算所用的时间将会呈指数倍增长,且由于计算机内存空间的限制,函数递归可能会有爆栈风险(Runtime Error)。
code
#include <bits/stdc++.h> #define PI 3.1415927 using namespace std; typedef long long ll; ll f(ll now){ if(now==1||now==2){ return 1; } return f(now-1)+f(now-2); } int main() { int n; cin >> n; while(n--){ int m; cin >> m; cout << f(m) << endl; } return 0; } -
解决方法:递推方程(见下)
注:当第n个阶段的状态仅与第n-1个阶段的状态有关时,可以认为没有重叠子问题,但依然可以通过动态规划求解
-
解决
-
数组的构建
dp[i]:到达第i个台阶的总可能数 -
递推方程的求解
-
到达第M个台阶只有两种可能:
- 从第M-1级楼梯跨1级台阶
- 从第M-2级楼梯跨2级台阶
-
dp[M]=dp[M-1]+dp[M-2]
-
-
初值的定义
- 易知
dp[3]=dp[2]+dp[1],dp[2]=dp[1]+dp[0],而dp[0]不合要求,故只需求边界dp[2],dp[1] - 到第二个台阶有两种可能,到第一个台阶有一种可能:
dp[2]=2,dp[1]=1
- 易知
-
code
#include <bits/stdc++.h> #define PI 3.1415927 using namespace std; typedef long long ll; int main() { ll n,ans[50]; memset(ans,0,50*4); ans[1]=1; ans[2]=1; ans[3]=2; for(int i=4;i<50;i++){ ans[i]=ans[i-2]+ans[i-1]; } cin >> n; while(n--){ int m; cin >> m; cout << ans[m] << endl; } return 0; }
补充
-
一维动态规划:递推
-
满足无后效性,最优子结构但不具有重叠子问题性质的问题:分治
如:二分法求最值
-
不满足无后效性:回溯