0 写在前面
一个人活在世界上只有一辈子,多看一本书就多活一辈子。 —— 黄永玉《无愁河的浪荡汉子·八年》
1 基本介绍
多目标跟踪雷达:
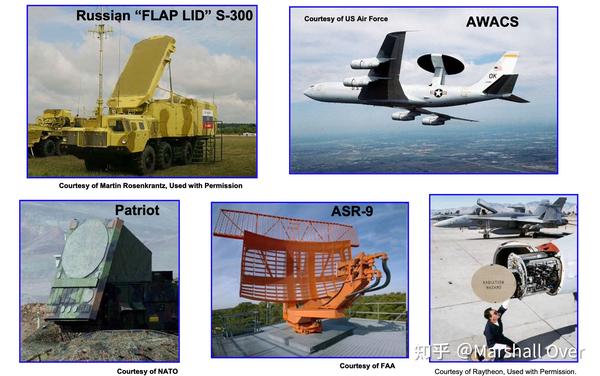
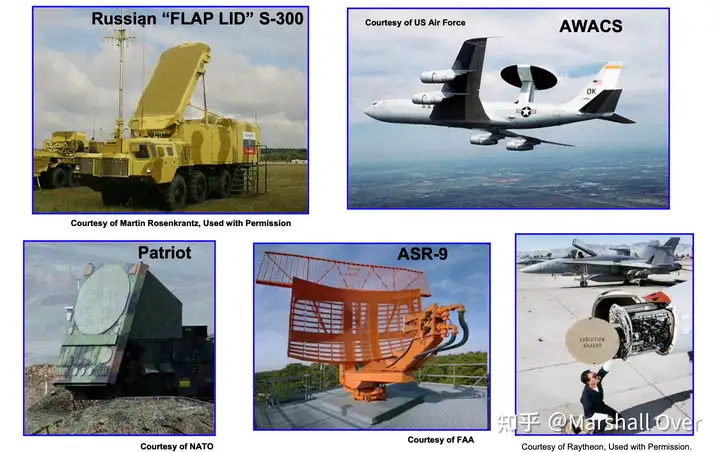
雷达跟踪实例:
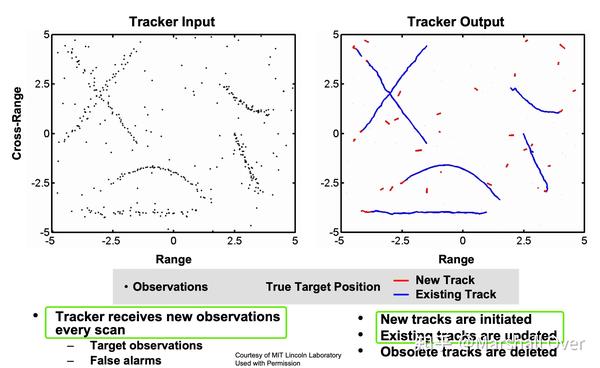
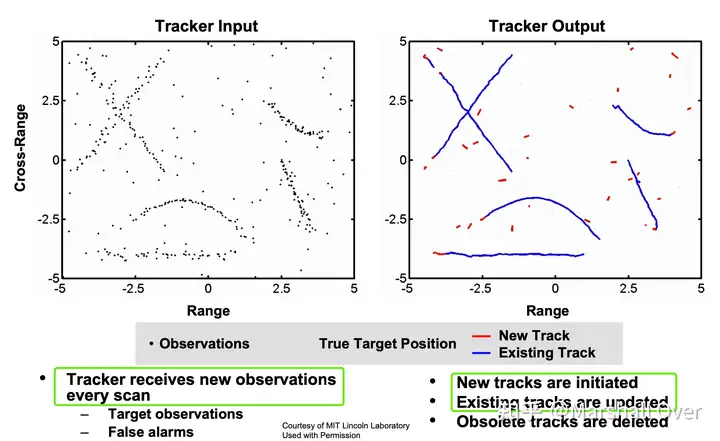
2 跟踪过程
跟踪过程流程框图:
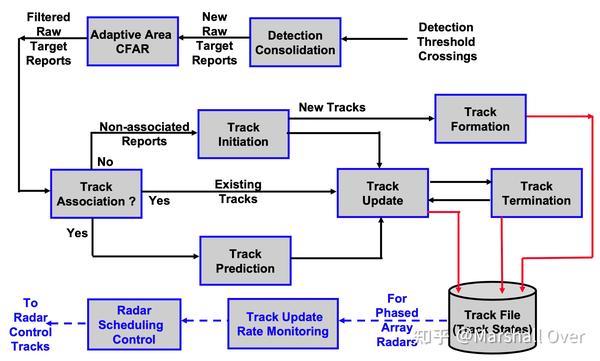
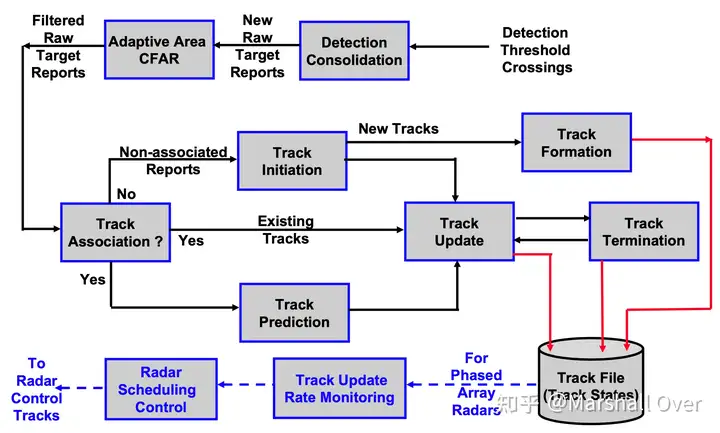
简单跟踪任务:跟踪关联、跟踪初始化、跟踪维护、跟踪终止。
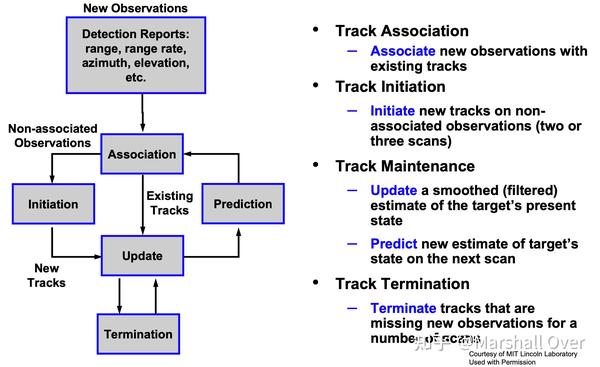
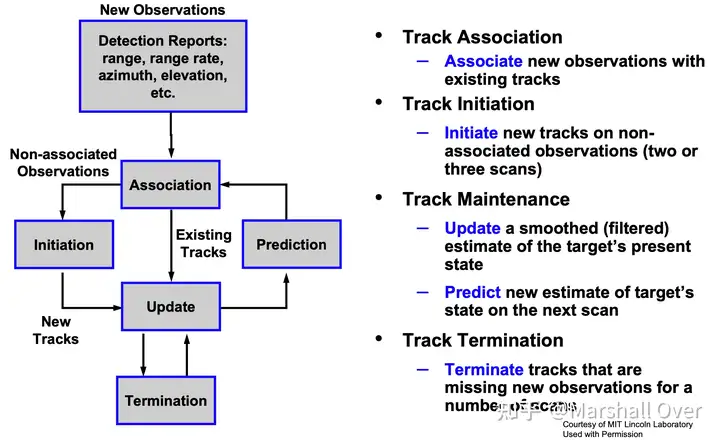
跟踪过程的目标:
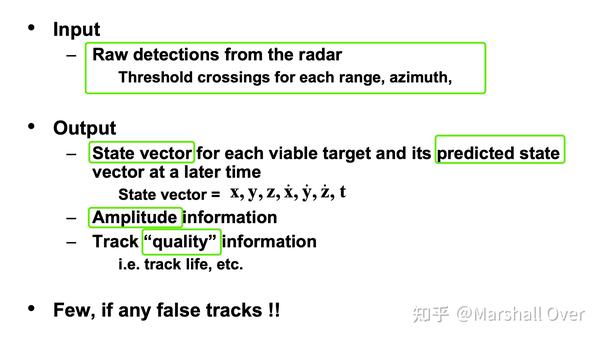
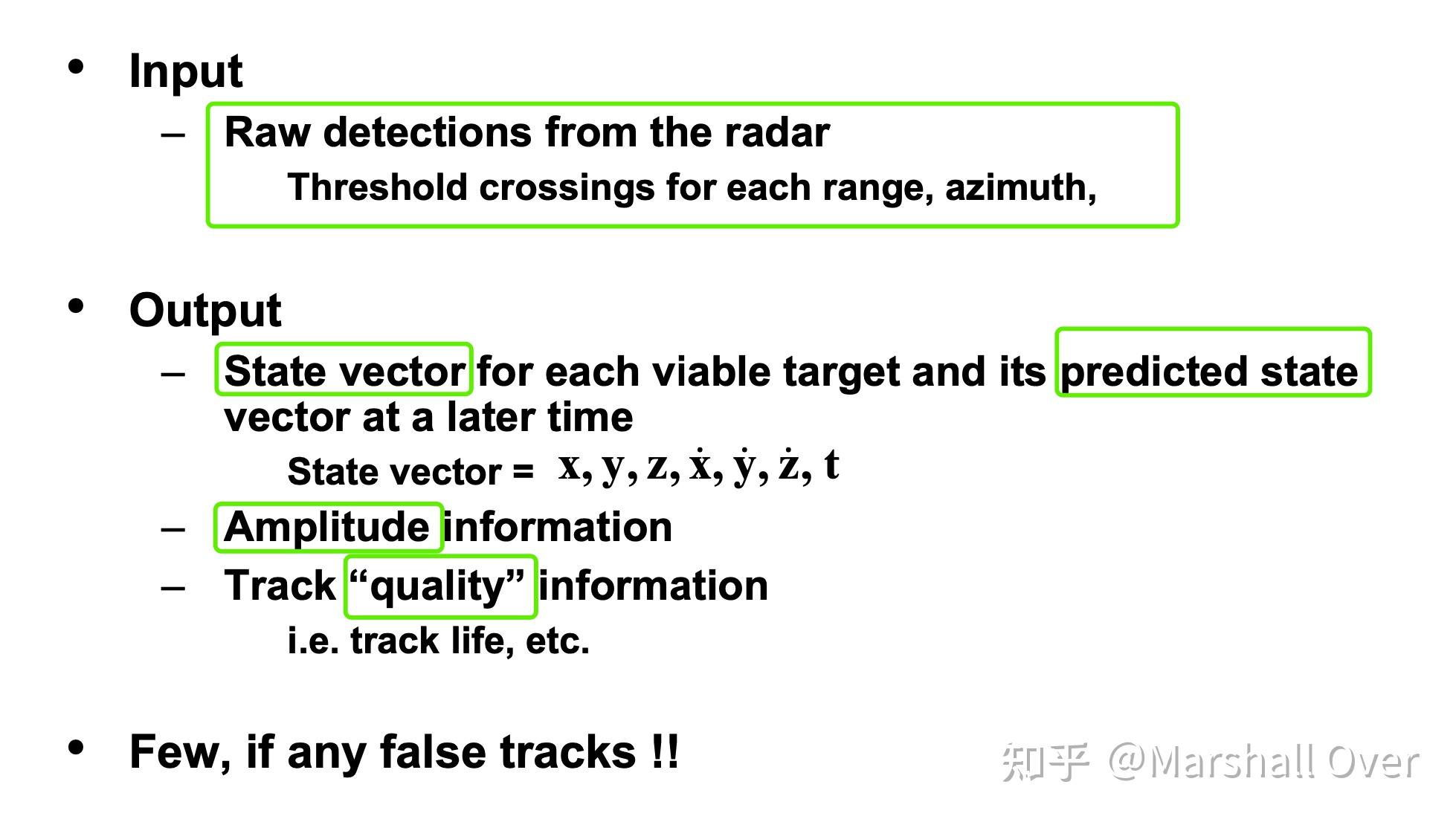
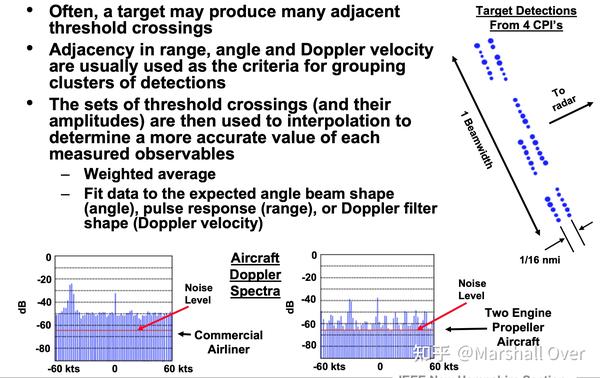
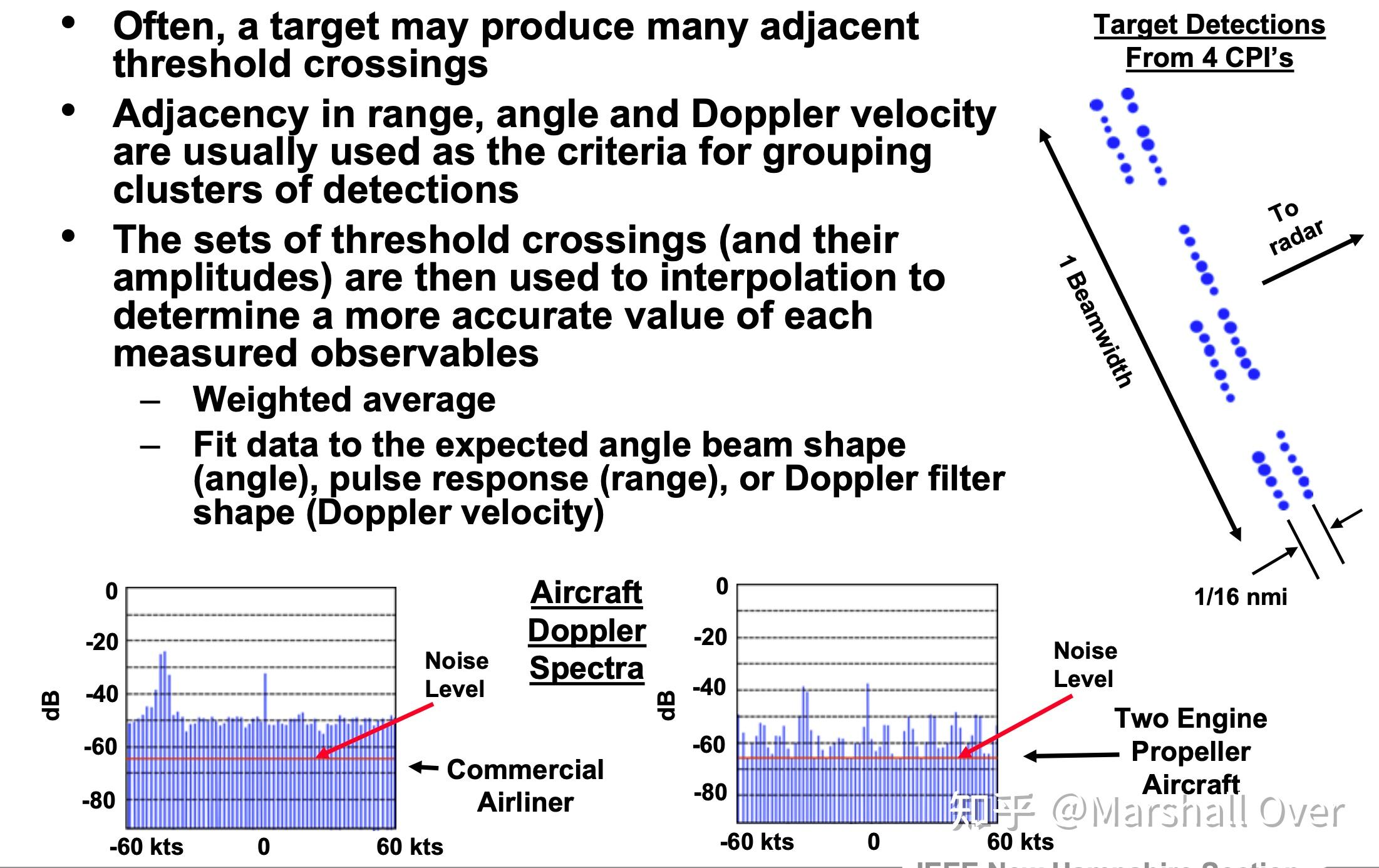
Detection Consolidation:
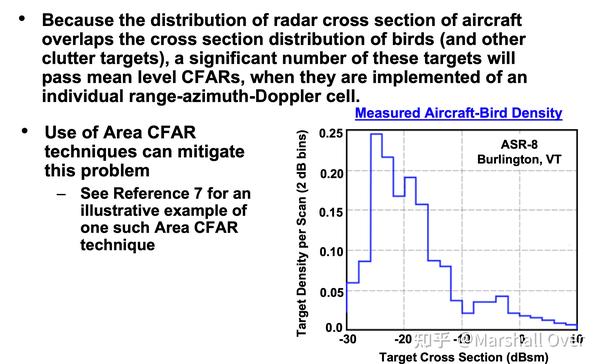
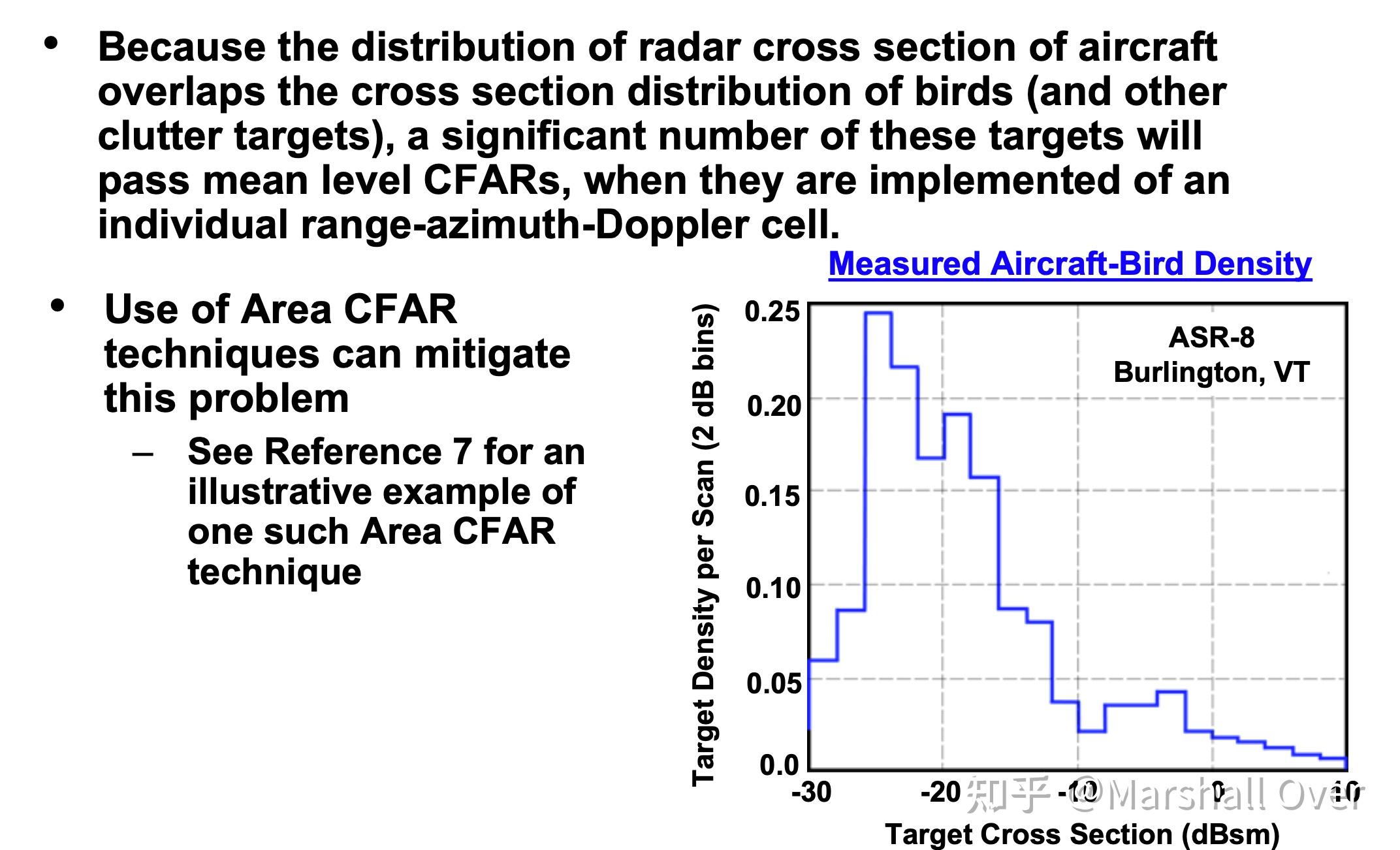
自适应区域恒虚警:
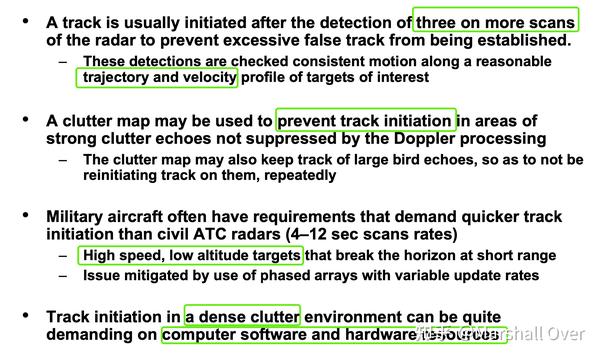
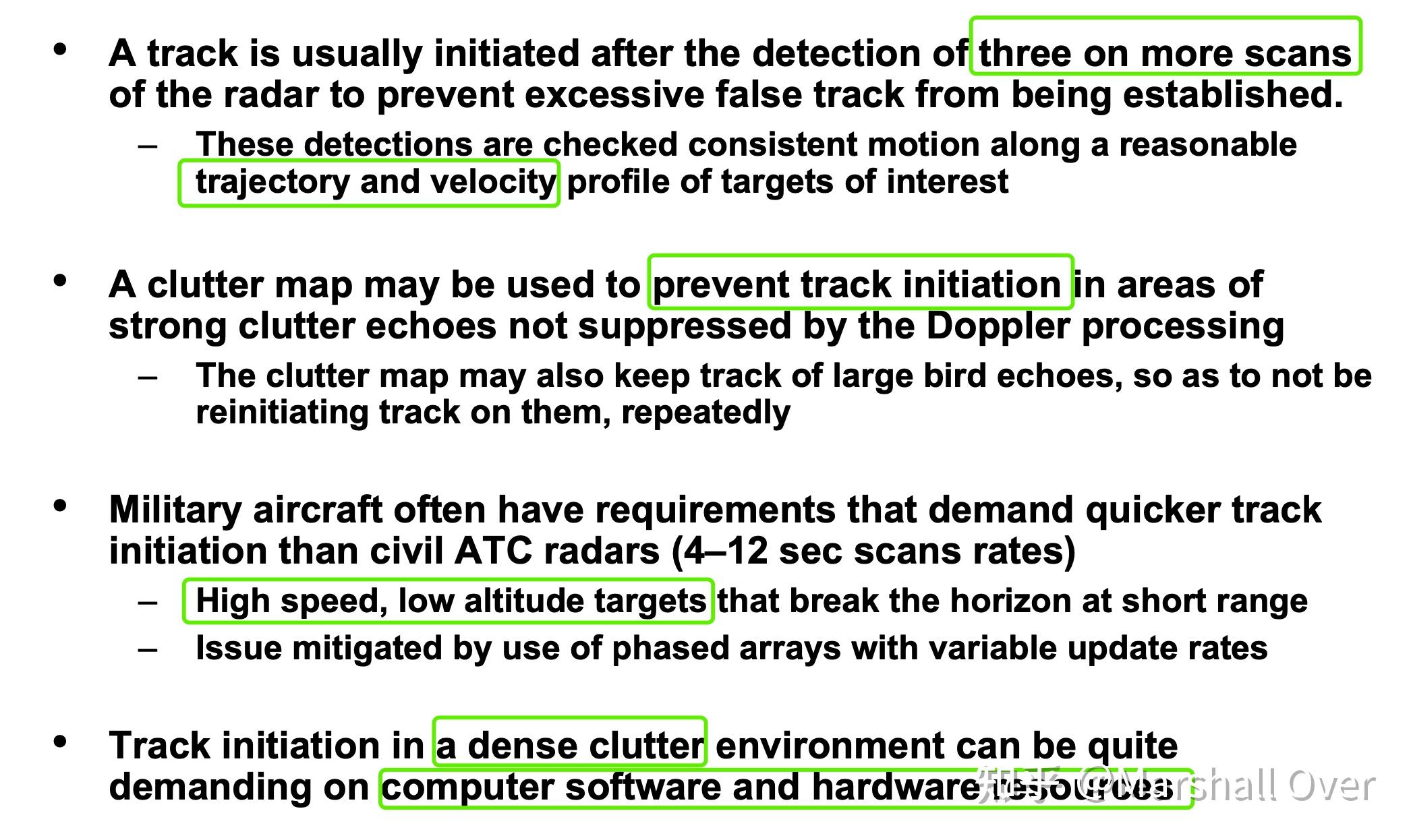
跟踪初始化:
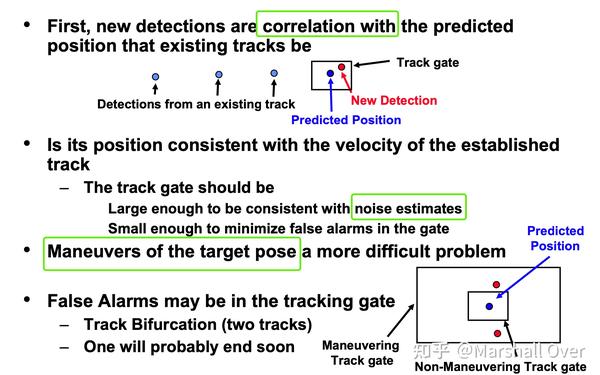
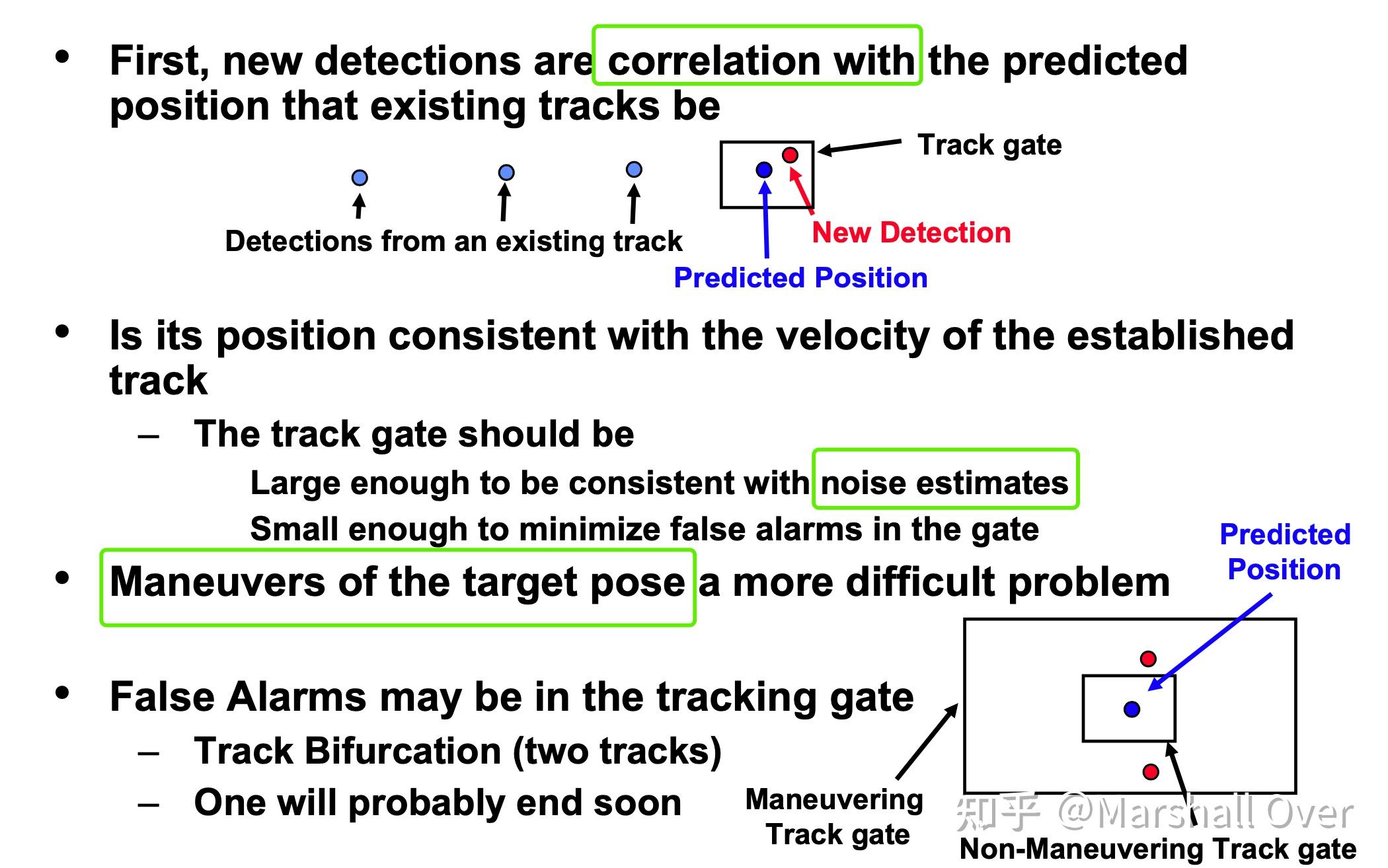
跟踪关联:
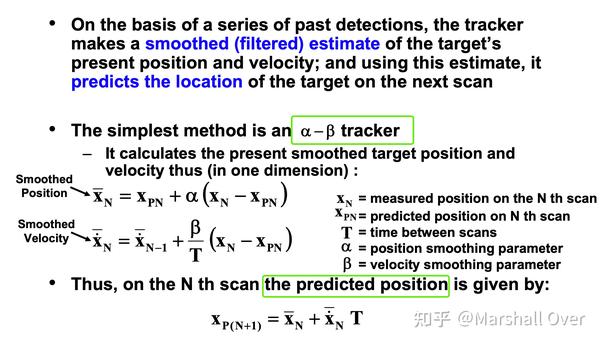
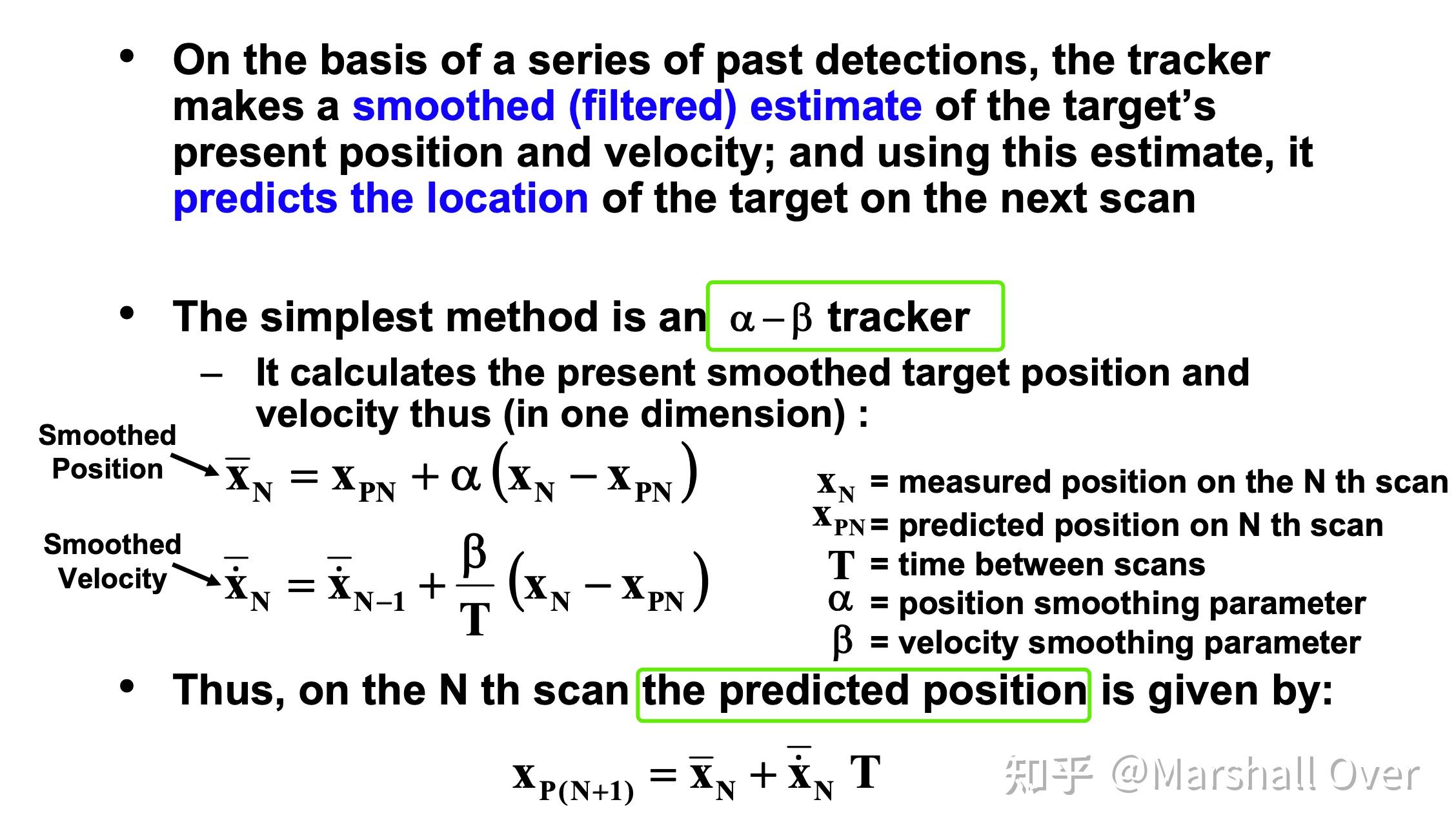
跟踪平滑(滤波)和预测:
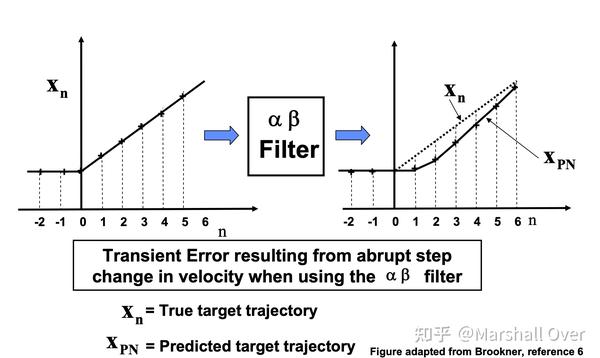
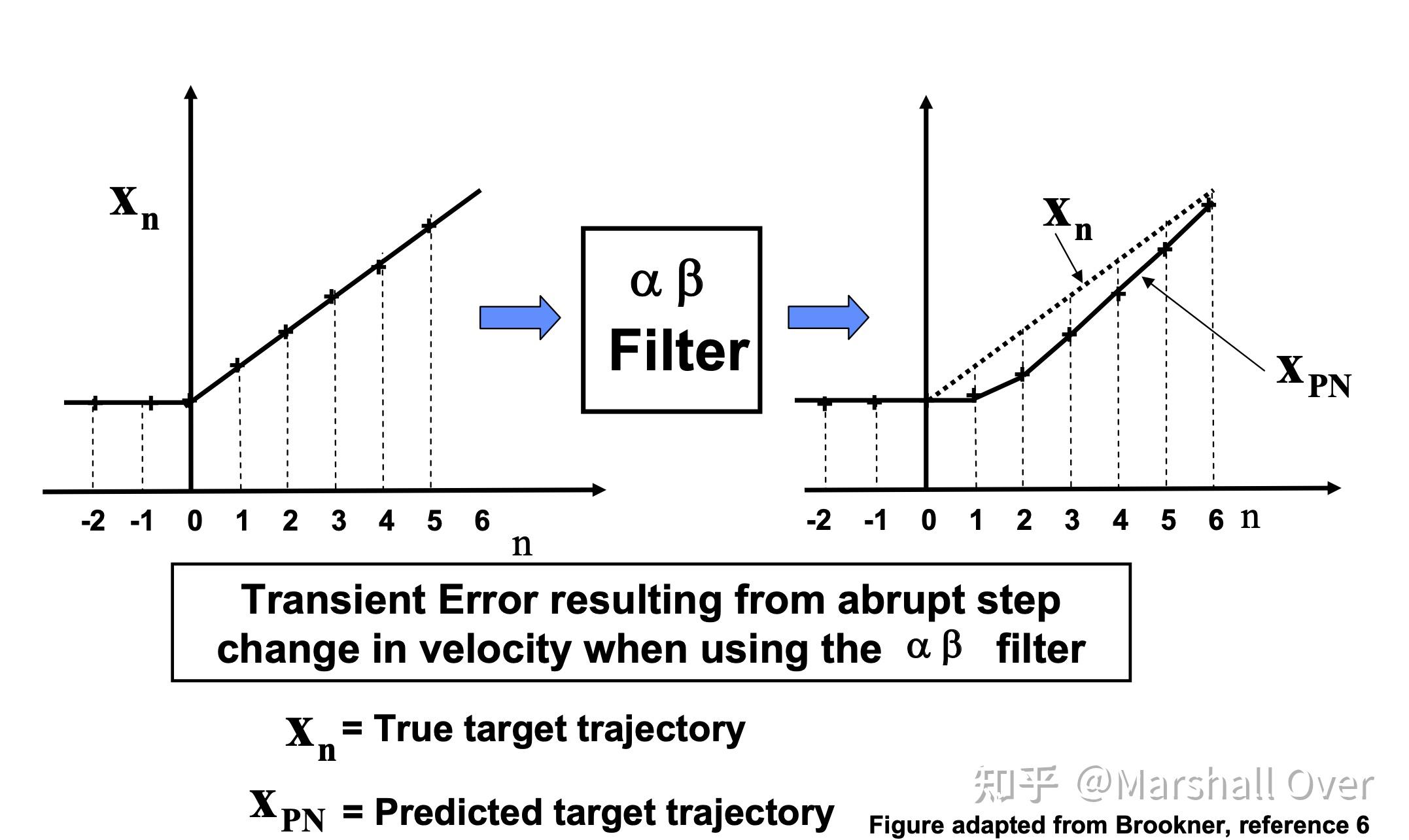
机动目标产生的瞬态错误:
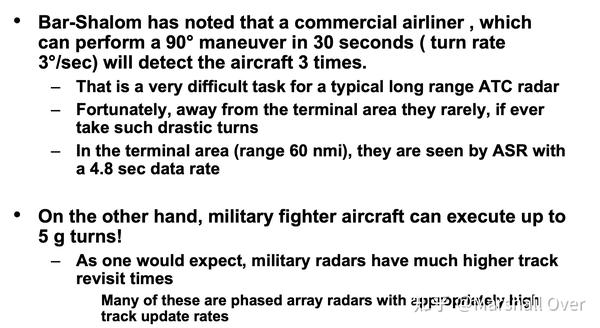
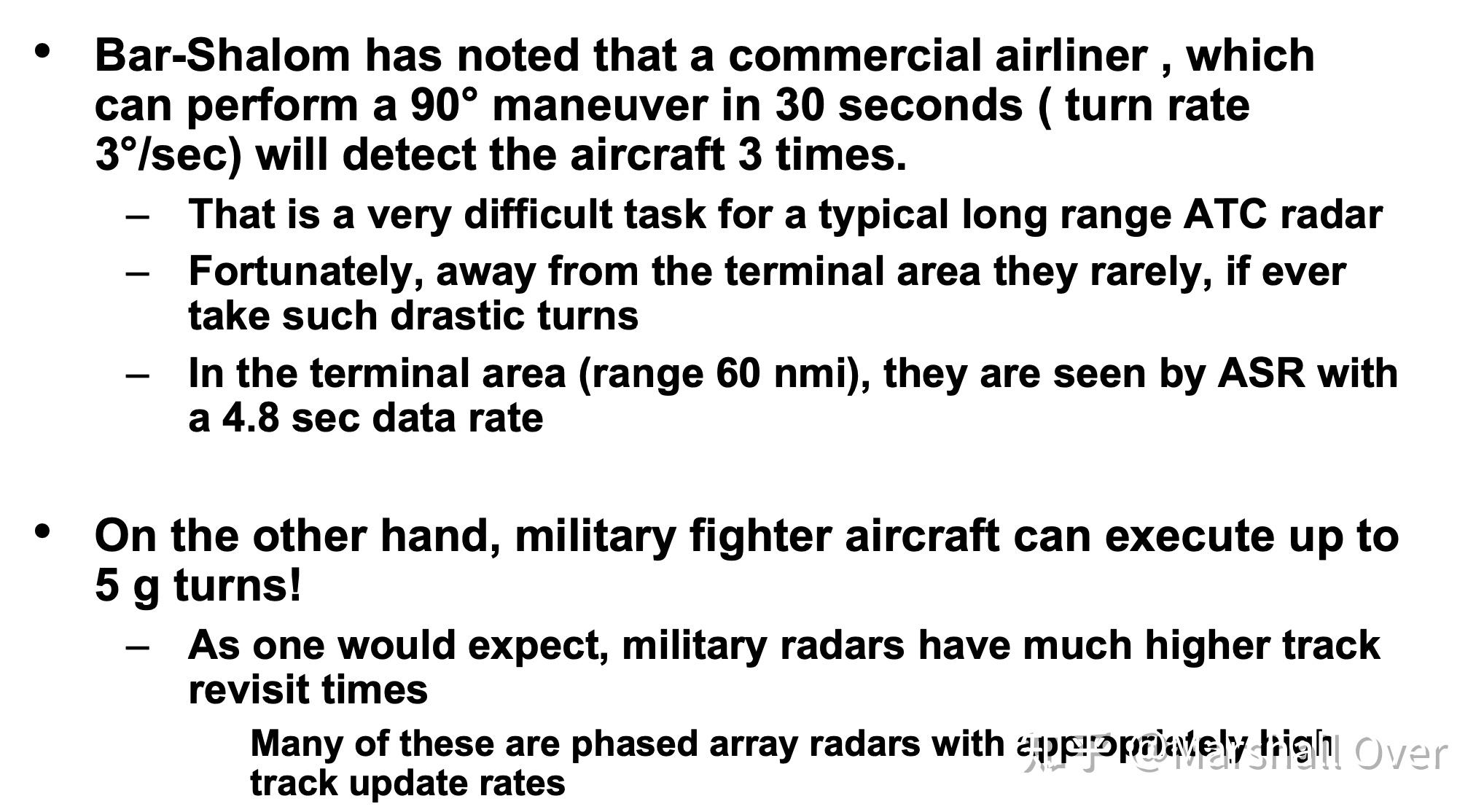
机动目标问题:
机动目标实例:
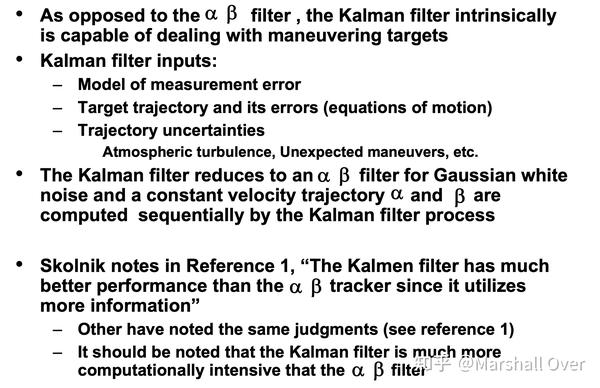
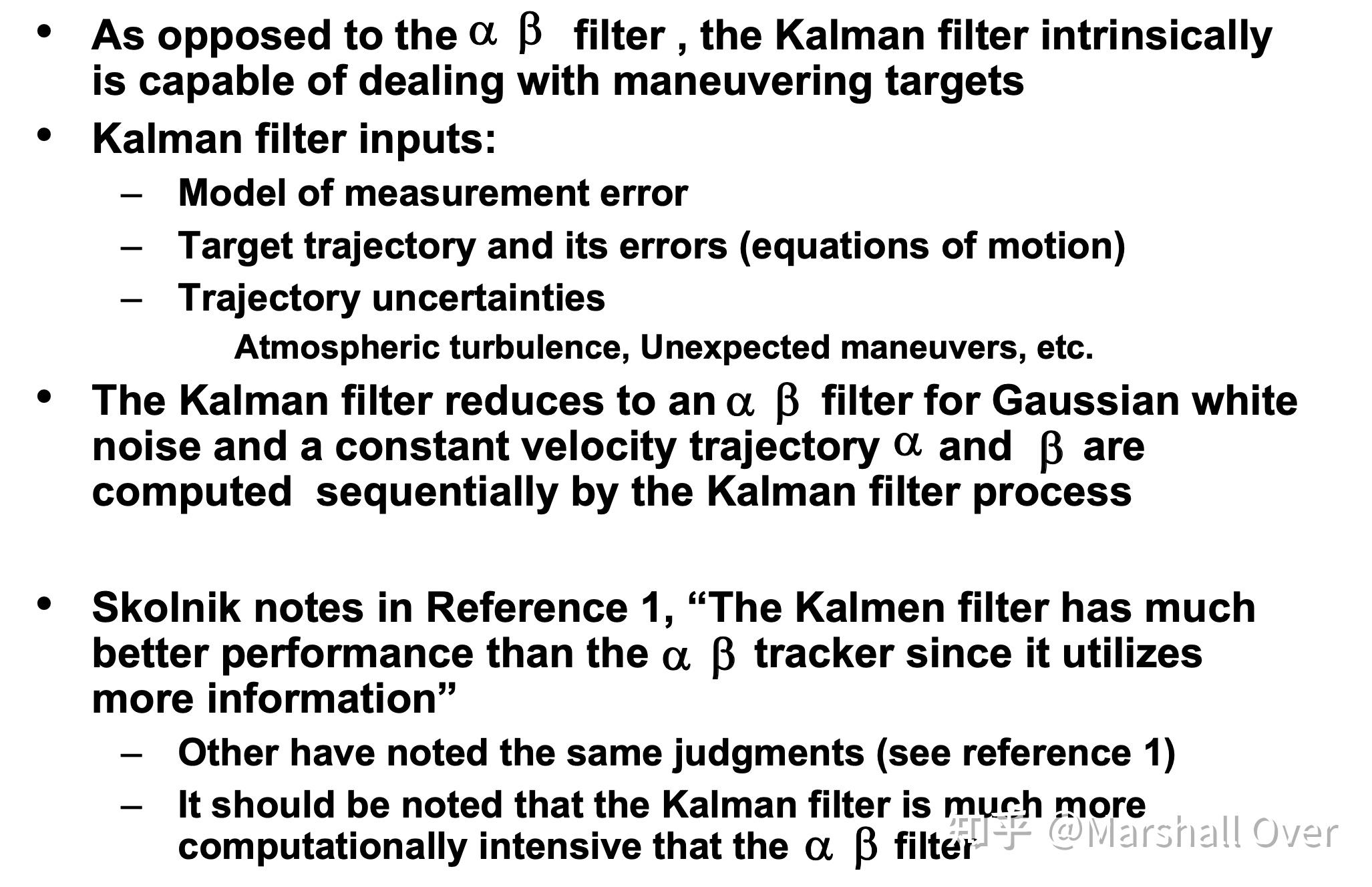
卡尔曼滤波:
两状态卡尔曼滤波(in Brookner’s notation):
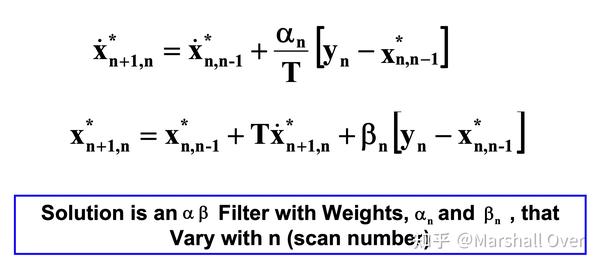
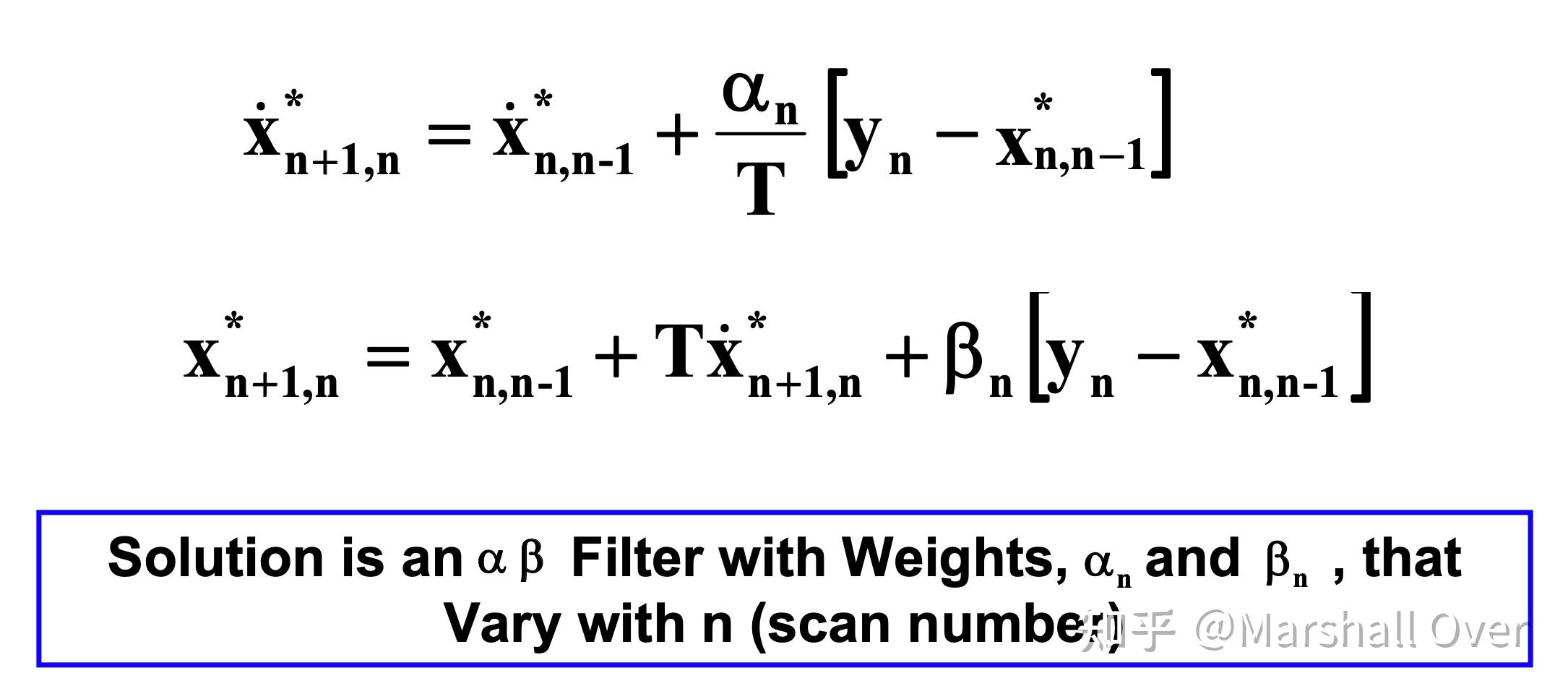
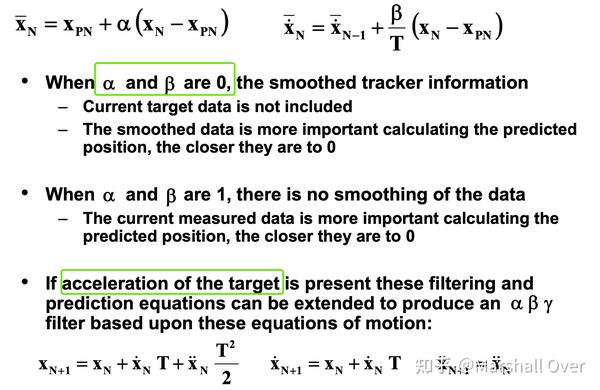
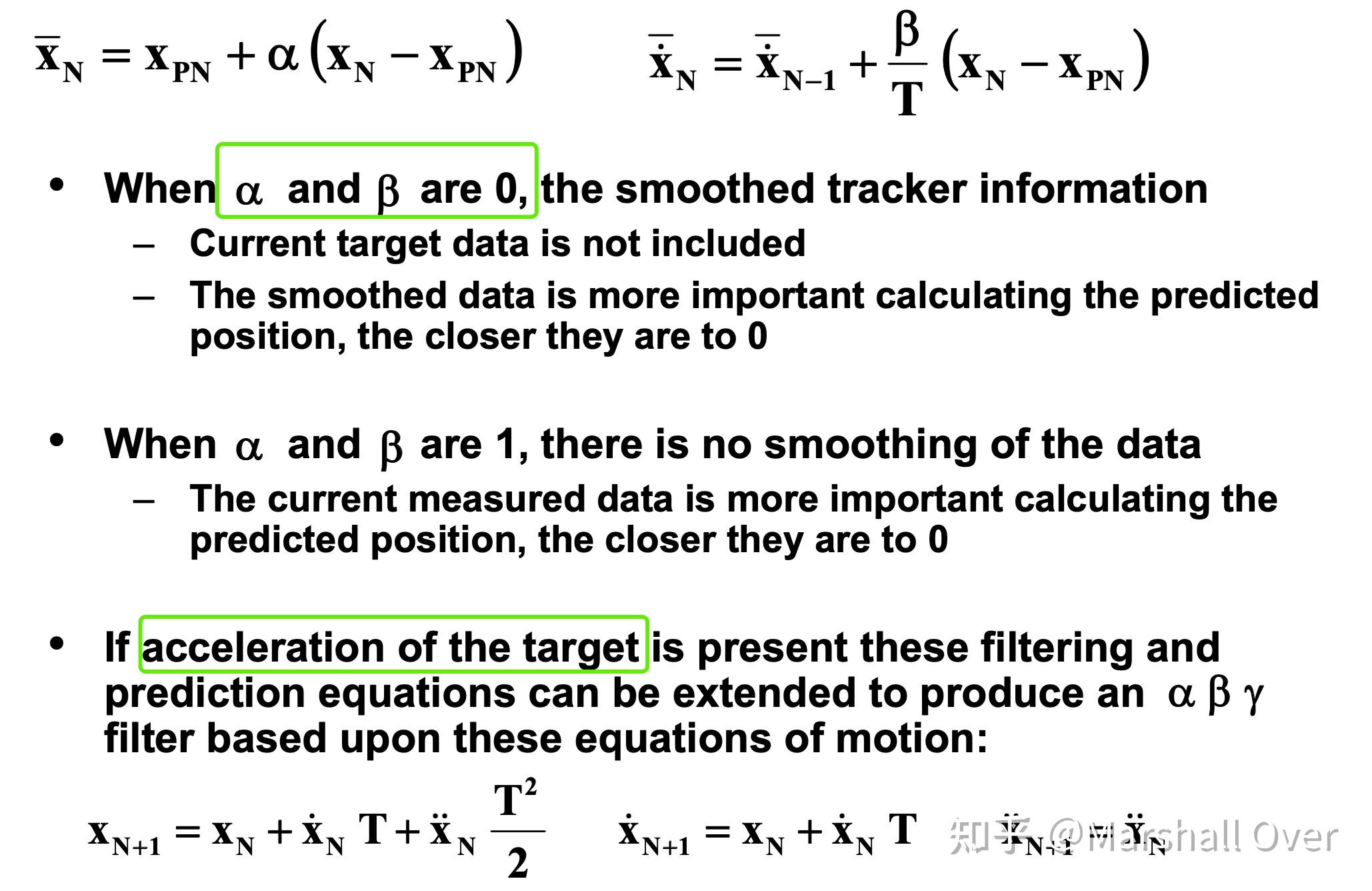
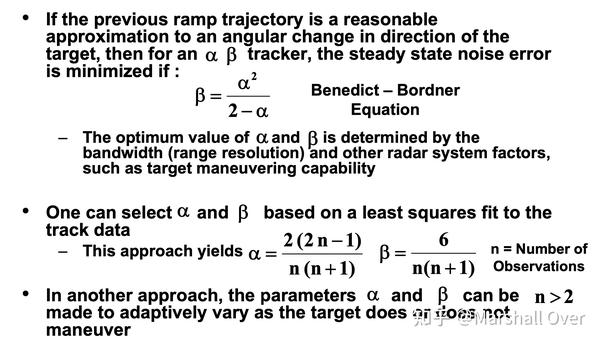
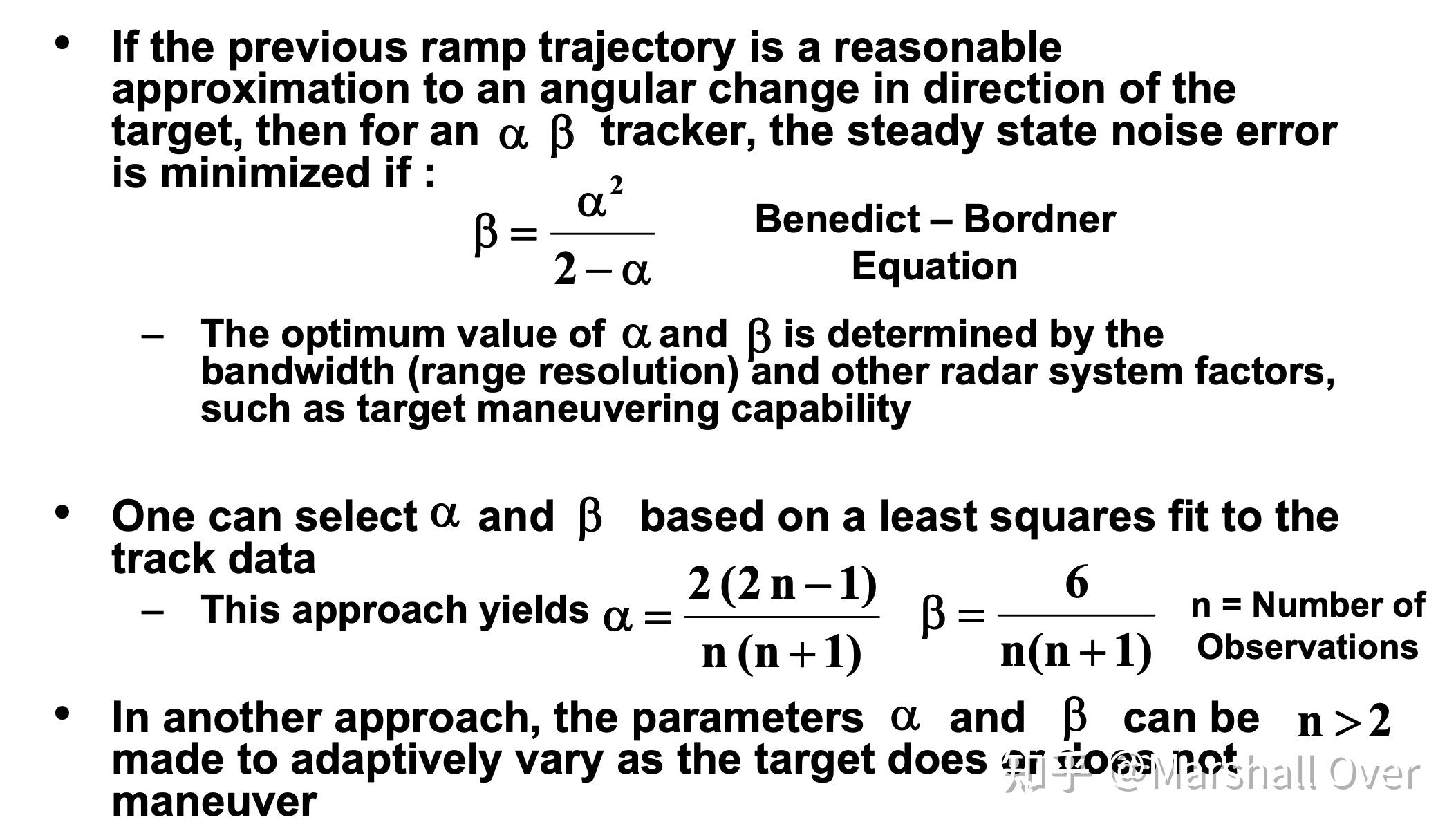
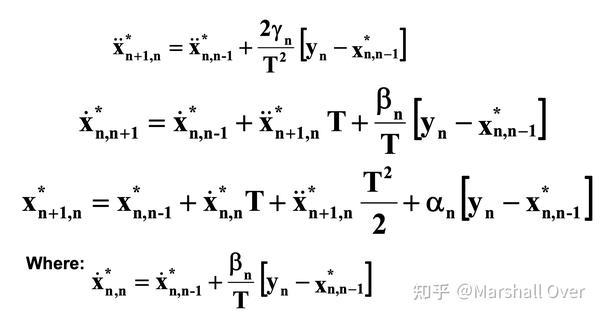
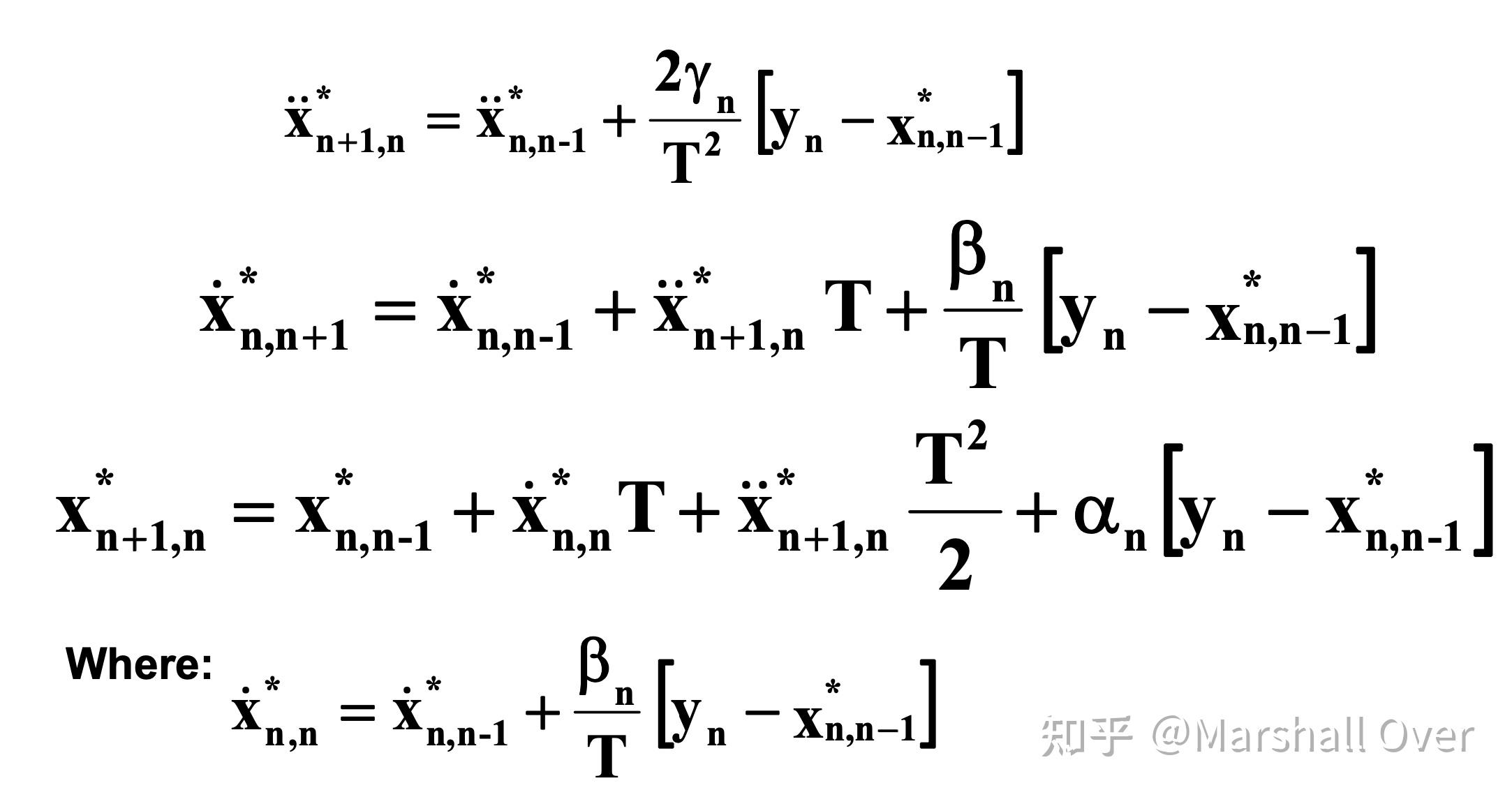
Filter (\alpha、 \beta、 \gamma Filter) in Brookner’s Notation:
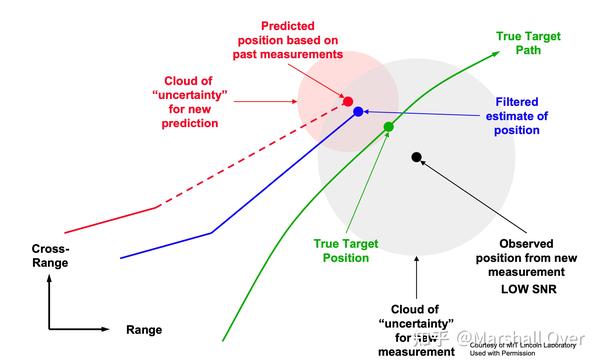
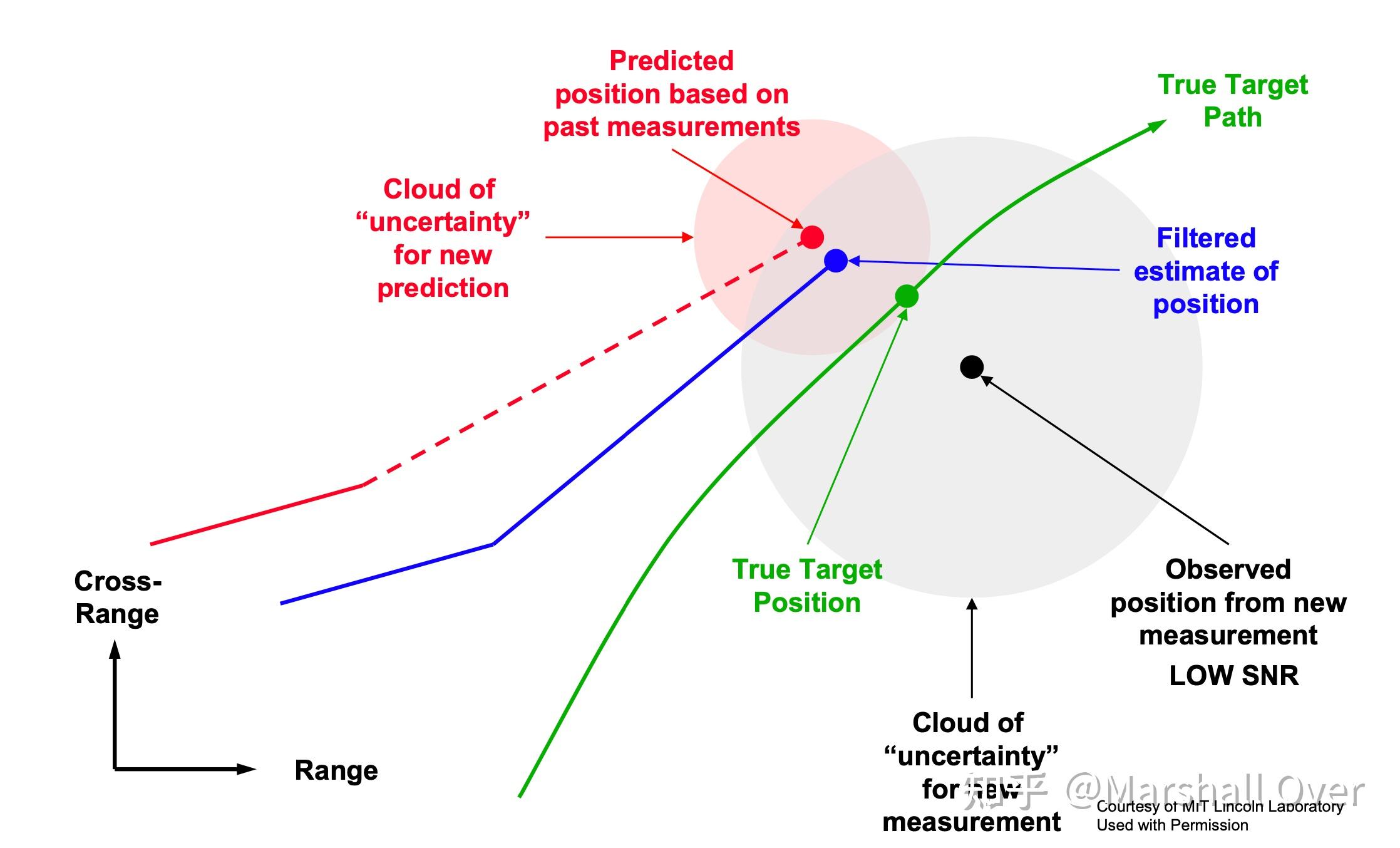
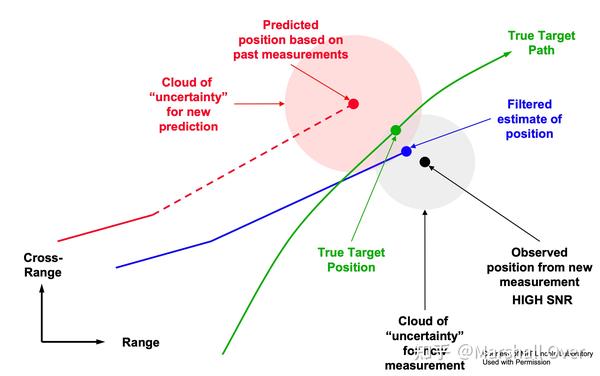
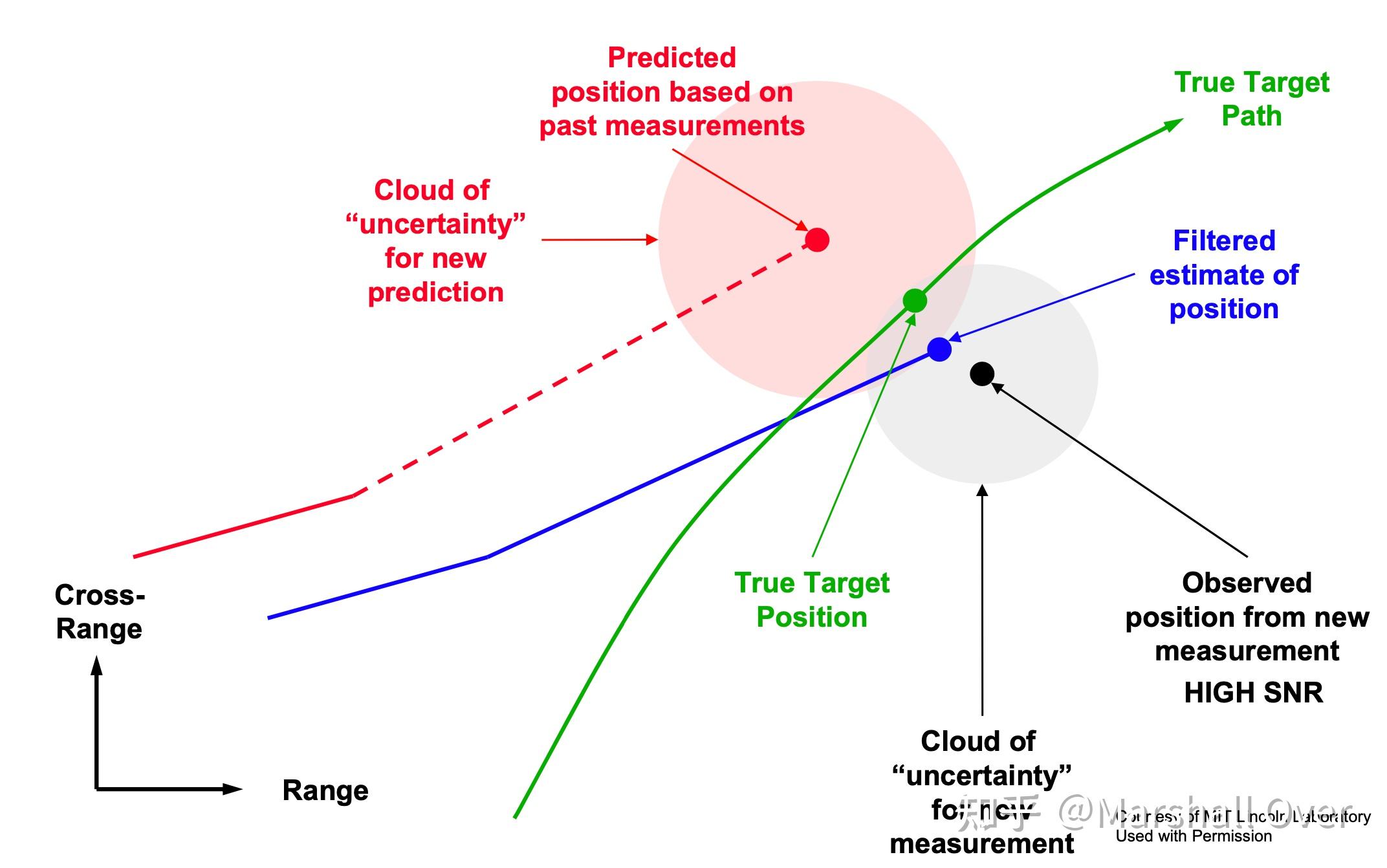
整合观测结果预测(Combining Predictions with Observations):
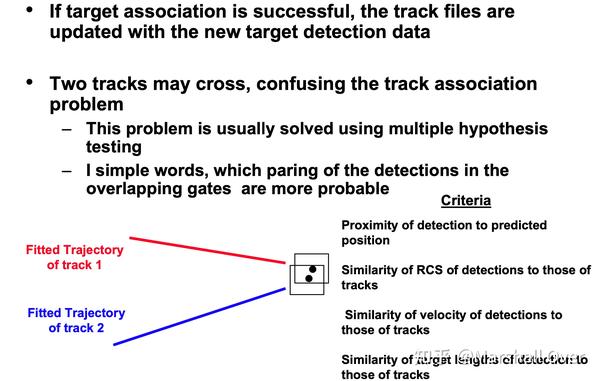
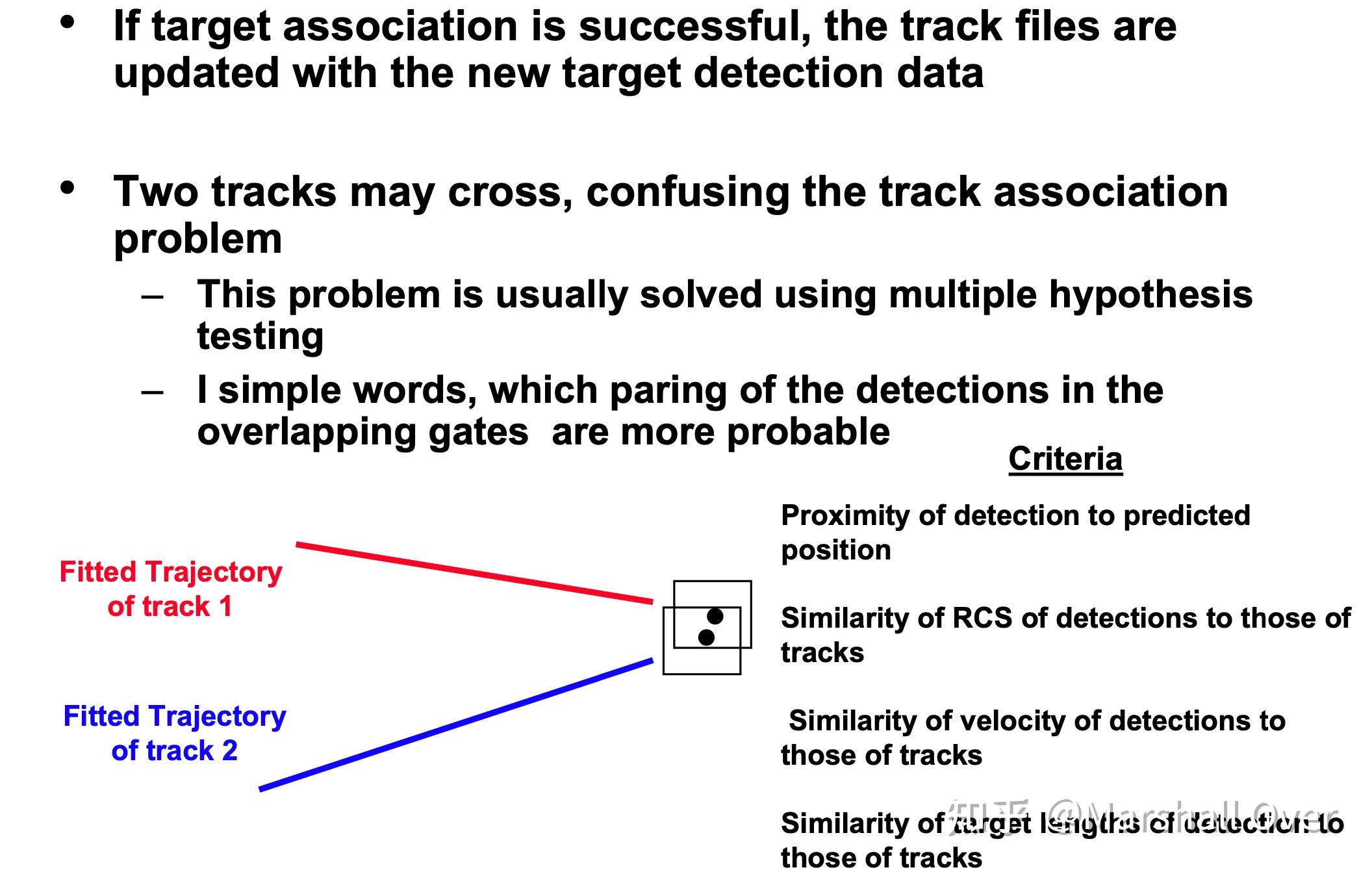
跟踪文件和跟踪更新:
跟踪终止:
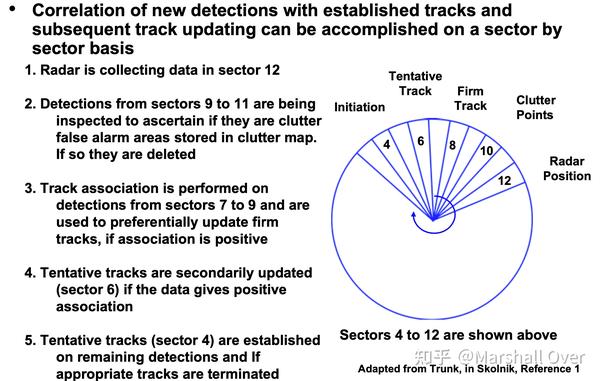
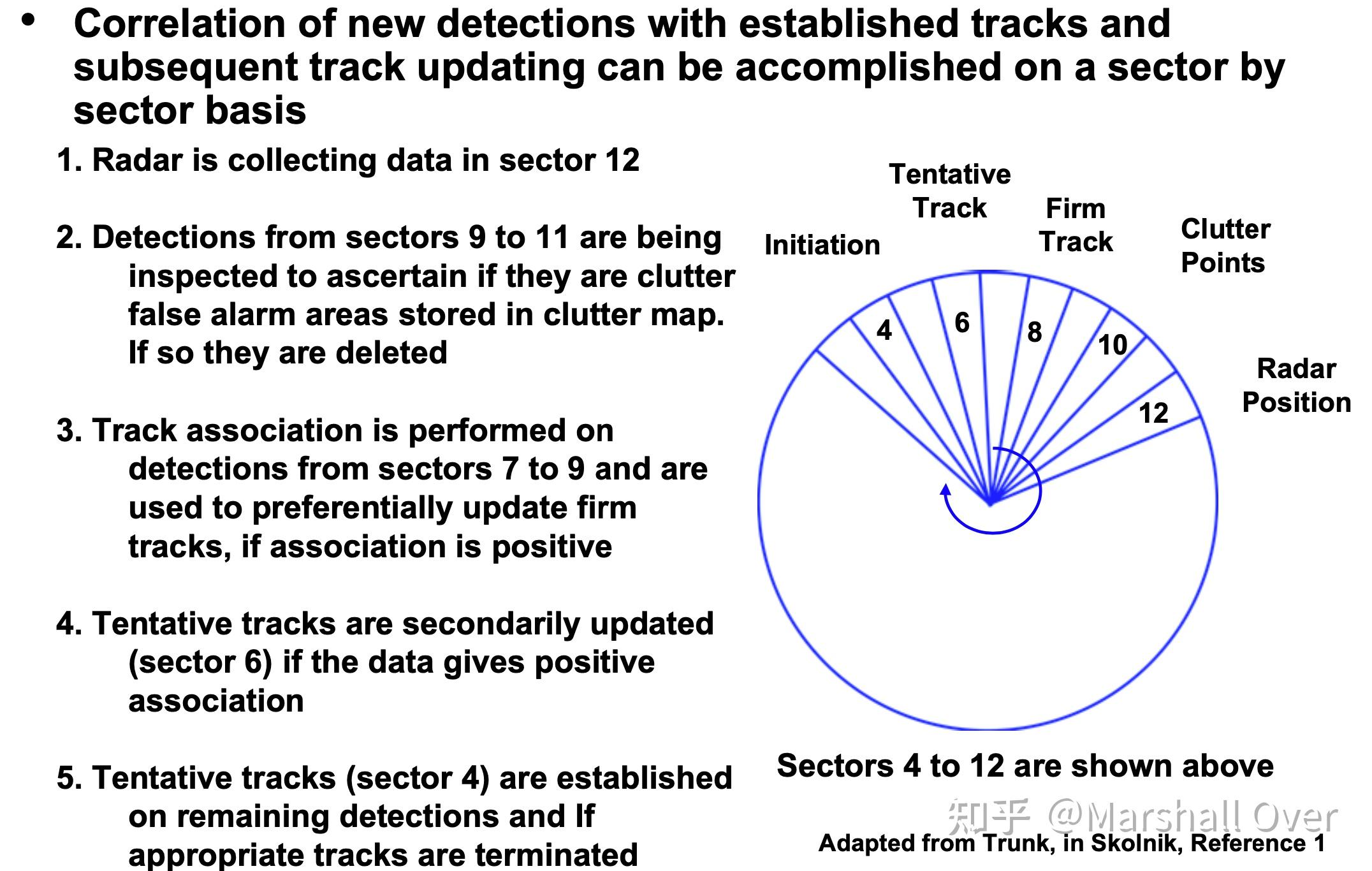
Tracking on a Angular Sector by Sector:
相控阵雷达跟踪:
3 相关丢失检测与相关虚警对跟踪性能的作用
背景:
Phenomena Causing Correlated False Detections:
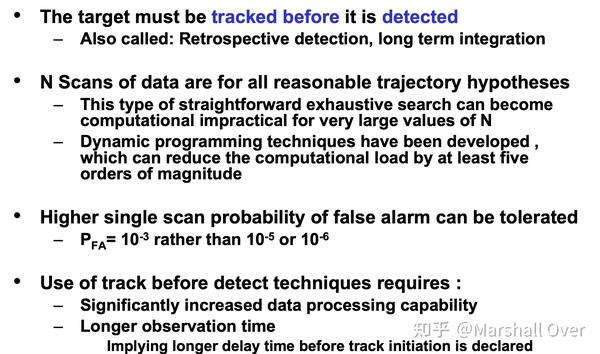
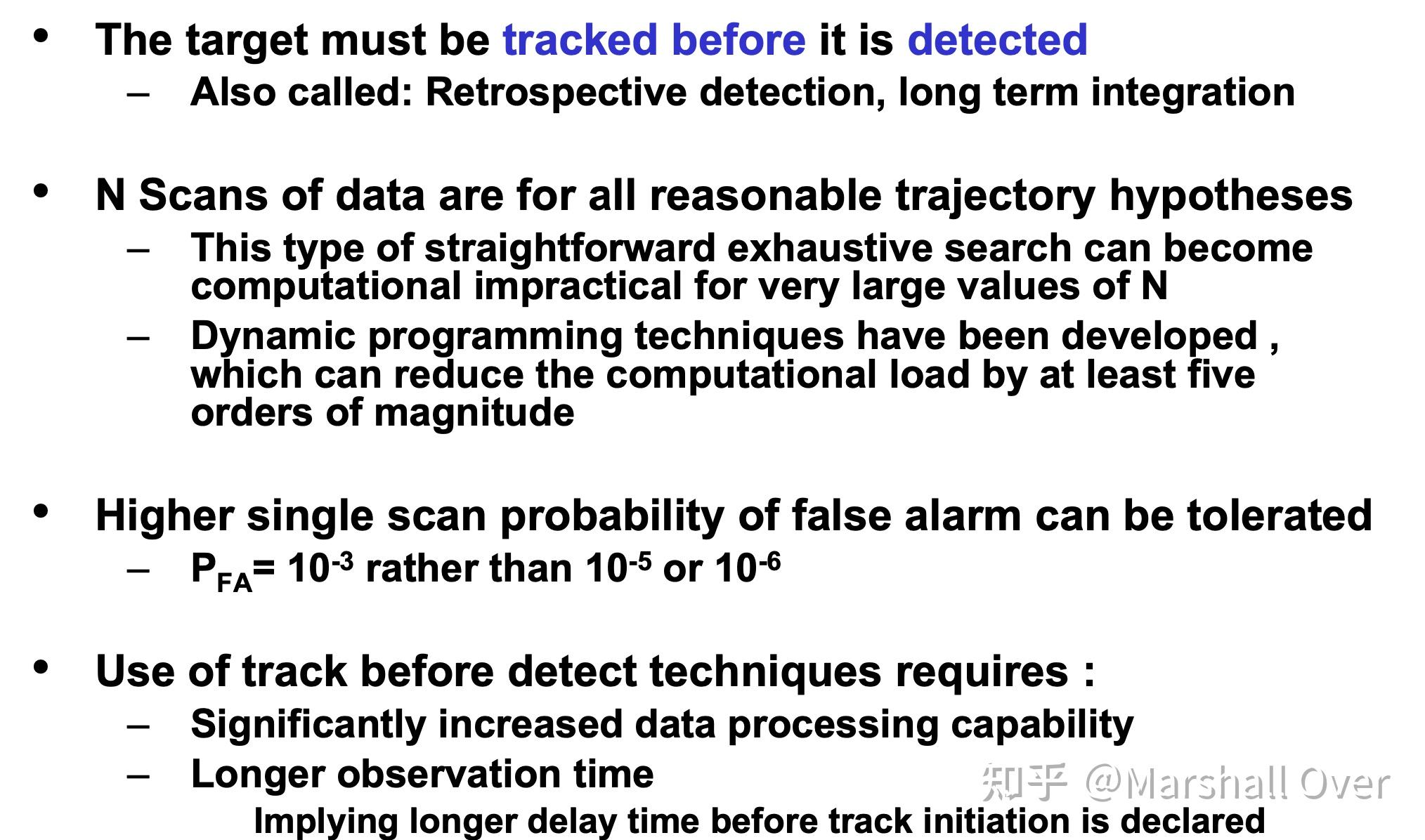
4 检测前跟踪技术
检测前跟踪(Track Before Detect,TBD)技术:
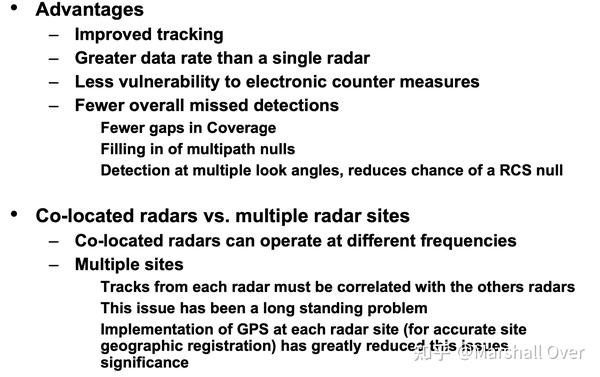
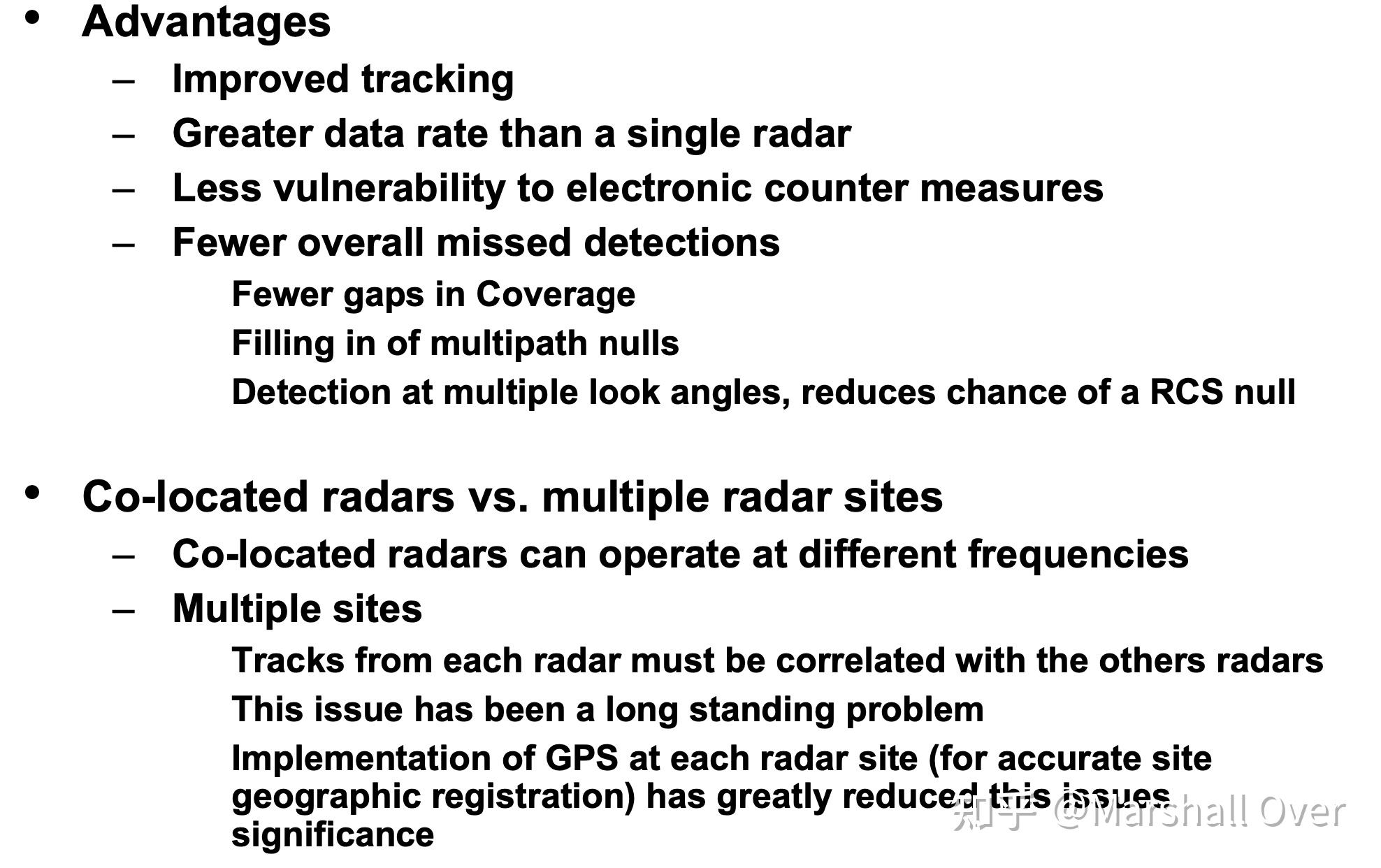
5 整合多雷达跟踪
Integrated Multiple Radar Tracking:
6 总结讨论
7 参考文献
[1] 百度翻译
[2] MIT 公开课: Radar Systems Engineering
标签:width,目标,公开课,参数估计,跟踪,雷达,MIT From: https://www.cnblogs.com/SymPny/p/17630352.html