飞机飞行基础知识
目录感谢 参考
例说姿态解算与导航14(地球,重力与坐标系) - 知乎 (zhihu.com)
常用导航坐标系 及 转换关系 (理论+程序)_他人是一面镜子,保持谦虚的态度的博客-CSDN博客_导航坐标系
Equations of motion II - JSBSim Manual (jsbsim-team.github.io)
1 专业术语
2 六自由度模型
What is Pitch, Roll and Yaw ? - Emissary Drones
Roll, Pitch, and Yaw | How Things Fly (si.edu)
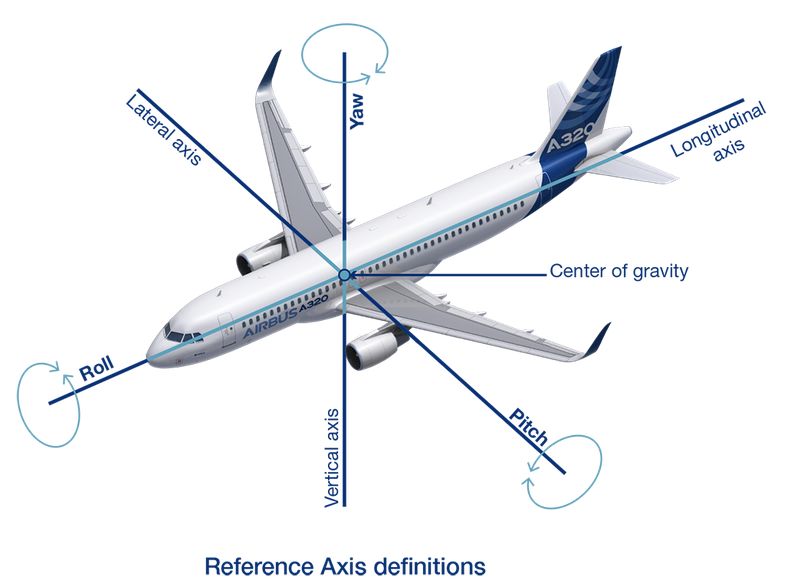
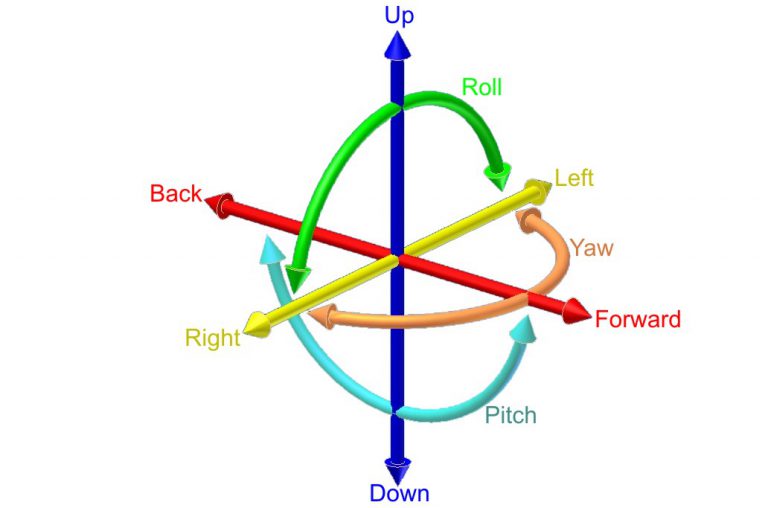
- longitudinal 纵轴 - roll 滚转;
- lateral 横轴 - pitch 俯仰;
- directional 指向轴 - yaw 偏航;
Roll
Yaw
Pitch
3 飞行姿态
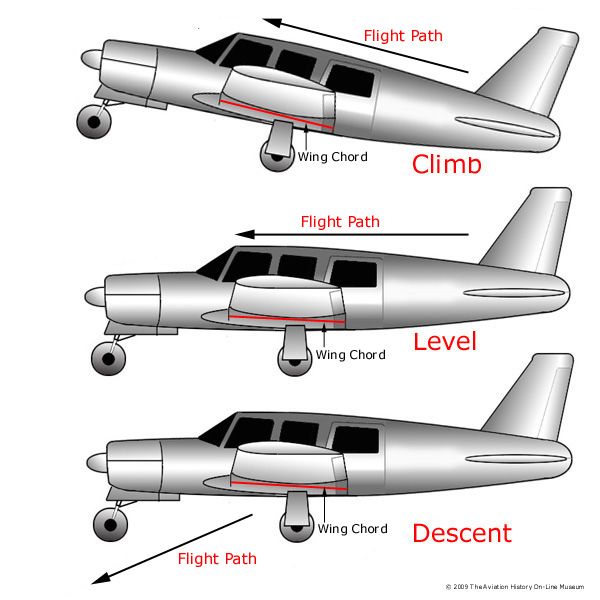
直飞
limb 爬升
level 平飞
descent 下降
迎角 Angle of Attack
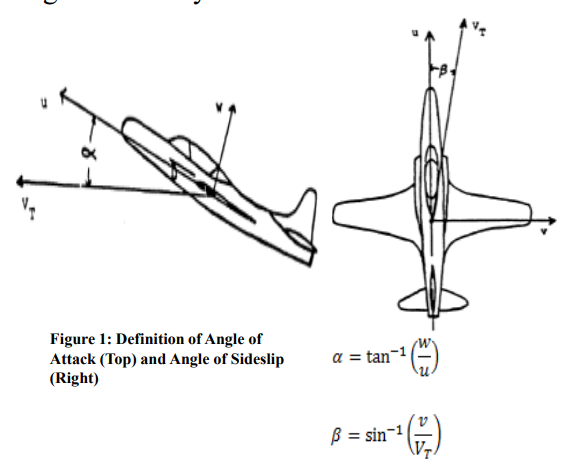
侧滑角 Angle of Slidelip
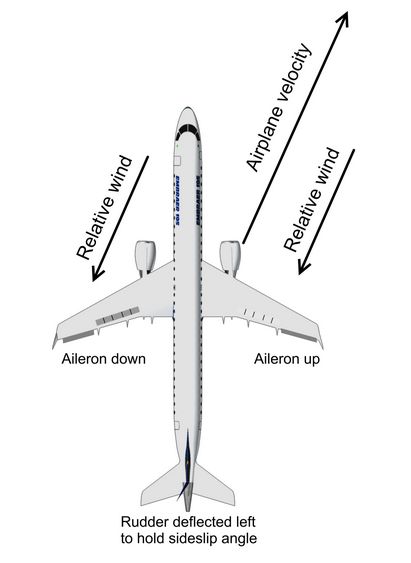
当飞机纵轴方向(首尾连线)与飞机前进方向(来风方向)呈一定夹角时,称为侧滑。
如下图所示,
- 方向舵(rudder)对飞机施加一个左转的偏航力矩(yaw moment);
- 左右副翼反向打开产生右滚力矩,升力产生向右的分量,使飞机向右侧滑行;
- 因机翼具有上反翼(dihedral)布局,机身右滚后右侧机翼升力增加;同时左侧机翼升力减小,因此产生左滚力矩,与右滚力矩平衡;
- 因机翼具有后扫(sweptback)布局,机身左转后右侧机翼迎风面积变大,因此升力增加;
- 右侧机翼因dihedral和sweptback增加的升力产生诱导阻力,与rudder产生的左转力矩平衡。未能平衡的部分通过打开左侧扰流板找平。
正常飞行一般尽量避免这种情况,除非因条件限制不得不侧风起降(香港机场)。
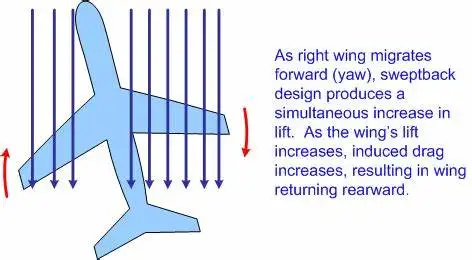
Sweptback 后扫
飞机向左偏航时,右侧机翼向前转,迎风面积增大,机翼阻力增大,产生偏航恢复力矩,增加偏航稳定性。
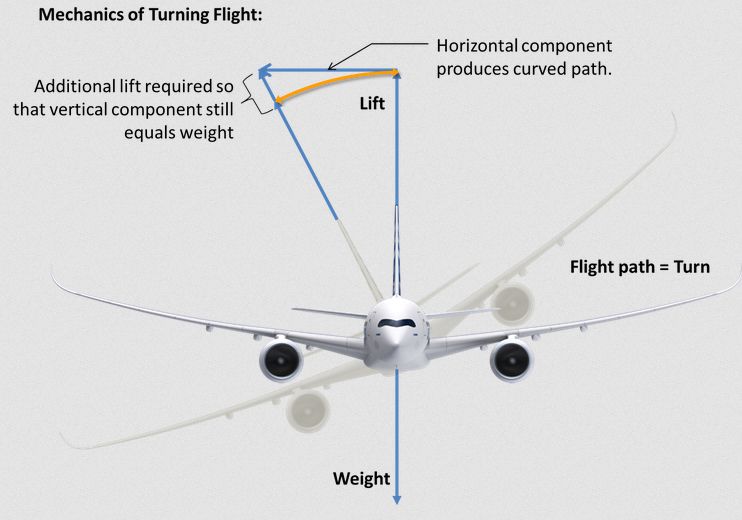
转弯
飞机转弯时,控制机身向转弯方向一侧倾斜是最快的方法。当飞机侧倾时,飞机的升力不再垂直向上,在水平方向上的分力能够使飞机机头更快的指向这一侧,从而更快速的完成转弯。
转弯时需要同时操作方向舵和副翼,方向舵提供偏航力矩,副翼使机身向目标方向倾斜。机身倾斜后升力方向也伴随倾斜,所以发动机需要增大功率才能维持升力的垂直分量等于重力,否则飞机会下降。
3 Control Surface 操纵面
飞机的操纵面,是铰链在飞机机翼、水平尾翼和垂直尾翼上的可动翼面。它们用来在飞机飞行和在地面高速滑跑时操控飞机。操纵面包括升降舵(全动平尾)、副翼、方向舵等主操纵面以及前缘缝翼、襟翼、扰流板等辅助操纵面,还有鸭翼这样的特殊操纵面。
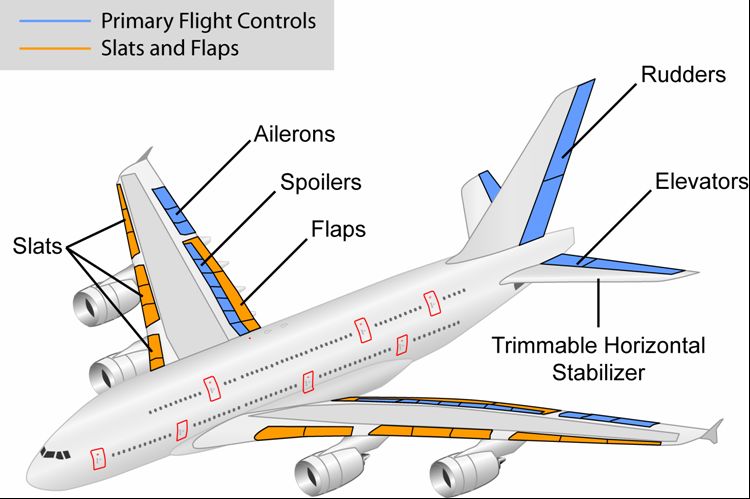

 波音787 操纵面
波音787 操纵面
Aileron 副翼
副翼是指安装在机翼翼梢后缘外侧的一小块可动的翼面。为飞机的主操作舵面,飞行员操纵左右副翼差动偏转所产生的滚转力矩可以使飞机做横滚机动。



Stablizer 安定面 升降舵 Elevator 与 方向舵 Rudder
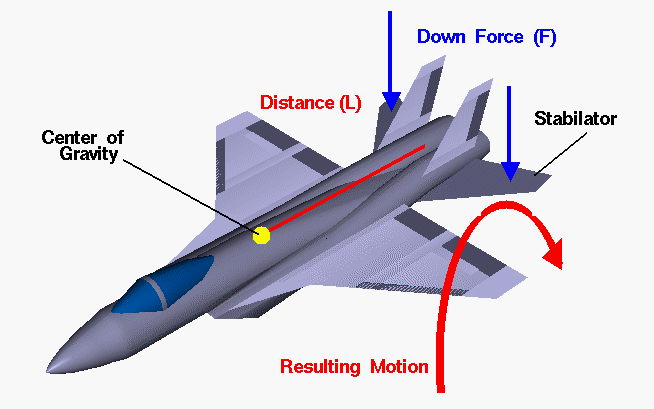
常规布局的飞机都会有一组安定面用于调整飞机的飞行姿态。安定面分为水平(horizontal)和垂直(vertical)两个翼面(surface),每个翼面又包括固定不动的结构和可调整的机构,水平安定面上的可动机构叫做升降舵(Elevator),垂直安定面上的可动机构叫做方向舵(Rudder),如下图所示。
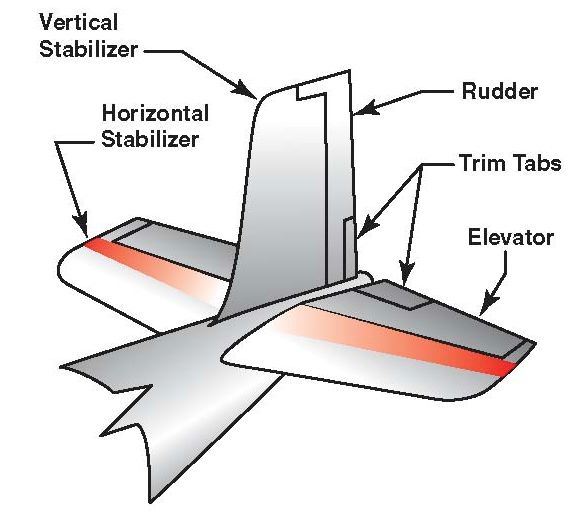
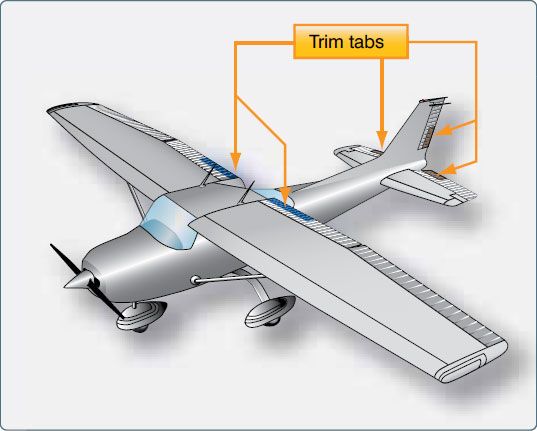
上图所示的安定面设计了专门用于配平的机构(trim tabs),但这不是必须的,直接微调升降舵和方向舵也可以起到同样的作用。
安定面的作用在于两个方面。
1)使飞机具有适当的静稳定性。当飞机在空中作近似匀速直线运动飞行时,常常会受到各种上升气流或者侧向风的影响,此时飞机的航行姿态就会发生改变,飞机会围绕质心发生偏航(yaw)、俯仰(pitch)及滚转(roll)运动,需要飞行员施加相反的操纵力去补偿。为了减轻飞行员的负担,也可以依据飞机的重心位置恰当地调定水平安定面的下倾角度,使飞机自动保持匀速直线飞行而不产生需要人为施加补偿力矩。而当飞机受到扰动抬头时,此时作用在水平安定面上的气动力就会产生一个使飞机低头的力矩,使飞机恢复到水平飞行姿态;同样,如果飞机低头,则水平安定面产生的力矩就会使飞机抬头,直至恢复水平飞行为止。
2)当飞机需要调整航向时,飞行员只需要施加一个较小的操纵力就能产生足够的转向力矩
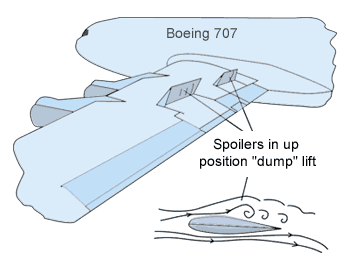
Spoiler 扰流板
扰流板有时也称为“减速板”、“阻流板”或“减升板”等,一般存在三种用途
- 破坏机翼上的气流,可以以减少升力,帮助飞机减速。
- 飞机转向时,完成横滚(roll)运动可以使用副翼和扰流板。
- 增大飞行阻力,帮助刹车。


Leading Edge Slat 前缘缝翼
前缘缝翼是安装在主翼前缘的一段或者几段狭长小翼,Slat 就是一种可以打开或关闭的缝隙(slot)。

如下图所示,前缘缝翼打开时,机翼下面的一部分气流经过缝隙流到上表面,增加上翼面气流的速度,延缓气流层的分离,提高升力系数,降低失速速度。
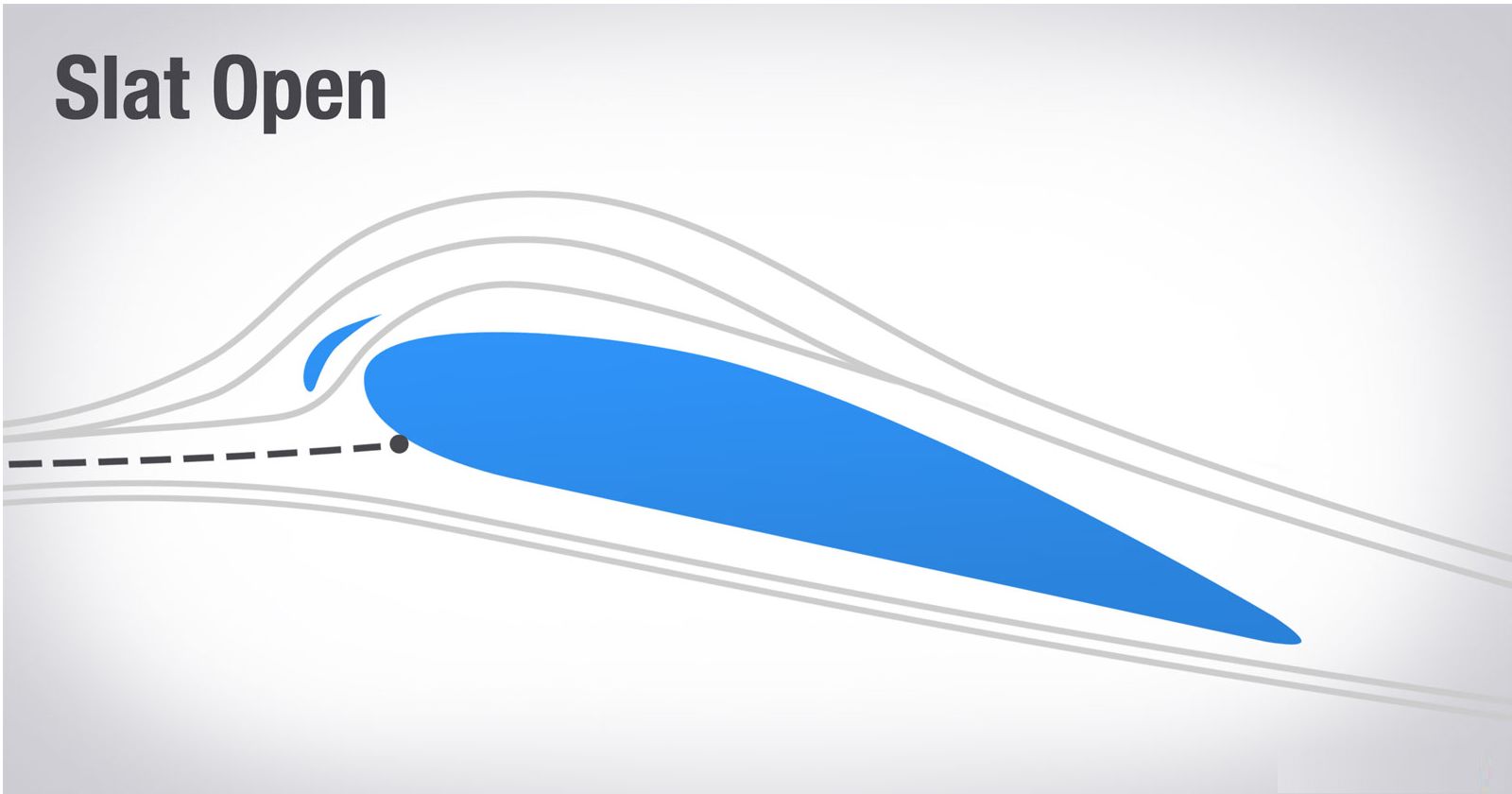
缝翼一般只在大迎角低速飞行时起作用。正常飞行时缝翼会收回以减小阻力。
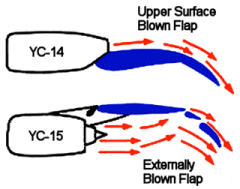
Flap 襟翼
襟翼是安装在机翼后缘内侧的翼面,襟翼可以绕轴向后下方偏转,增大了机翼的弯度以增加机翼的升力。
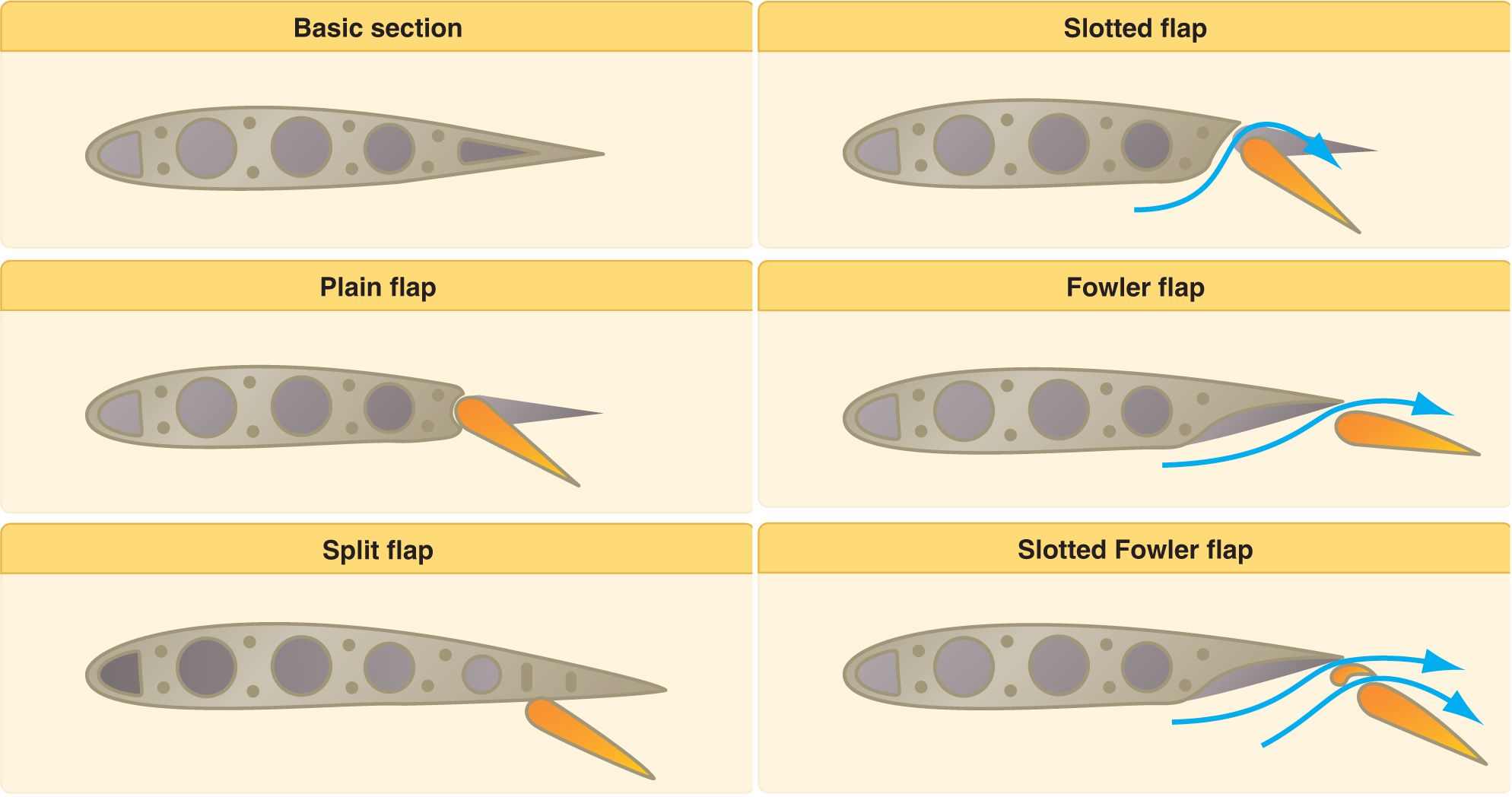 襟翼的主要类型
襟翼的主要类型
开缝襟翼(slotted flap)允许主翼下方的气流通过缝隙(slot)流过襟翼上方,以提供额外的升力。主翼下方这部分气流原本对升力贡献很少,通过这种设计实现了物尽其用。

飞机起飞时,襟翼伸出并向下弯折,可以起到增加升力、帮助飞机起飞的作用。

飞机降落时,襟翼伸出到最大位置,同时扰流板也开到最大,可以使飞机的升力和阻力同时增大,以利于降低着陆速度,缩短滑跑距离。

Stall strip 失速条
用于改变飞机失速特性的结构,通常装在翼根部位,可以使翼根失速早于翼尖。
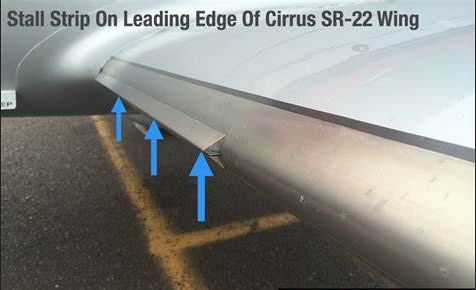
工作原理1: 飞机在即将失速的状态下飞行时, 机翼内侧的气流比外侧更加先分离。 也就是大翼内测先失去升力,能够在即将失去升力时让飞机低头。
工作原理2: 飞机速度过低时,stall strips 产生的紊流会一直吹向elevator,造成elevator振动,产生“抖杆”现象。
4 姿态解算与导航
例说姿态解算与导航14(地球,重力与坐标系) - 知乎 (zhihu.com)
大地中心惯性系,ECI(Earth-centered inertial frame,符号i)
地心惯性坐标系用XYZ表示,原点为地球中心,X轴值向春分点,既黄道平面(地球绕太阳公转的平面)与赤道的交点。
地心地固定坐标系,ECEF(Earth-Centered Earth-Fixed,符号e)
ECEF坐标系与地球固联,且随着地球转动。图中O即为坐标原点,位置在地球质心。X轴通过格林尼治线和赤道线的交点,正方向为原点指向交点方向。Z轴通过原点指向北极。Y轴与X、Z轴构成右手坐标系
原点在地心,X指向0经度0纬度点(本初子午线与赤道交点)。
ECI坐标系和ECEF坐标系的不同点是ECI坐标系不随地球转动:ECI坐标系为绝对惯性系,静止不动,ECEF随着地球一起转动。
地理坐标系(曲线坐标系, 符号G)
经纬度和高度组成的球面坐标系,一般顺序为经度( λ )(单位rad),纬度(L)(rad),高度(h)(m) 组成。也叫LLA.
是使用三维球面来定义地球表面位置,以实现通过 经纬度 对地球表面点位引用的坐标系。
一个地理坐标系包括 角度测量单位、本初子午线和参考椭球体三部分。在球面系统中,水平线是等纬度线或纬线。垂直线是等经度线或经线。地理坐标系依据其所选用的本初子午线、参考椭球的不同而略有区别。地理坐标系可以确定地球上任何一点的位置。首先将地球抽象成一个规则的逼近原始自然地球表面的椭球体,称为参考椭球体,然后在参考椭球体上定义一系列的经线和纬线构成经纬网,从而达到通过经纬度来描述地表点位的目的。需要说明的是经纬地理坐标系不是平面坐标系,因为度不是标准的长度单位,不可用其直接量测面积长度
局部导航坐标系(local navigation frame,符号 L)
也叫当地导航坐标系(local navigation frame) ,当地水平导航坐标、测地坐标系、地理坐标系或地面点坐标系。
从定义来分类,局部切线平面可分为基于垂直和水平尺寸定义的平面,其表现在纵坐标为上还是下。纵坐标为上时,称为ENU(东、北、天)坐标系,主要用于地理方面;纵坐标为下时,称为NED(北、东、地)坐标系,特别用于航空航天。
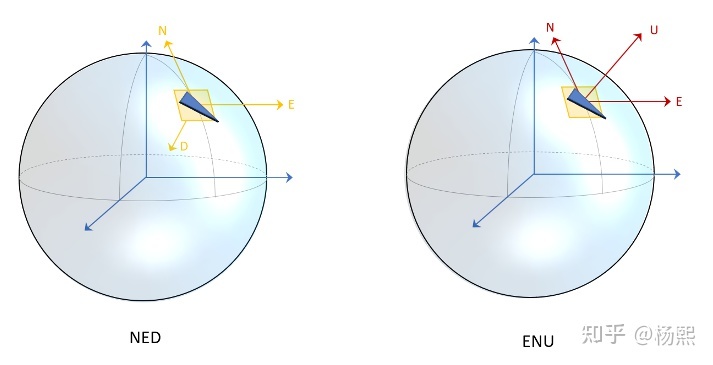
也是导航坐标系的一种,他把运动物体在地球表面的运动范围近似于平面(而非地球曲面),在小范围运动范围内(几百KM以内),当地切平面坐标系更加直观(距离原点,向东xx M, 向北 xxM, 向天(上) xxM 这样描述)
导航坐标系(符号n)
是惯性导航算法的基本参考系,运动物体在导航坐标系内进行位置,速度,姿态确 定,可选取 e 系或 L 系做为导航系。 在 e 系内导航,可以直接确定地心地固系下 的导航参数, 便于和 GNSS 等大地测量手段相结合,且动态模型简单,但不 利于 本质规律的研究。而在 L 系下导航,物理意义明确,便于理论分析和误差规律探 寻,利于内部控制, 但动态模型复杂, 且不能直接与 GNSS 等大地测量手段相结 合。对于组合导航解算,应选用 e 系,而对于理论分析,应选用 L 系;
载体坐标系****(Body Frame,符号b)
载体坐标系指的是以载体的质心为原点,OX沿纵轴方向,即载体前进方向,Z轴沿载体侧轴方向,指向右翼,Y沿载体竖轴方向,是右手坐标系而成(即指向天)。总的来说,载体坐标系相对于地理坐标系的关系就是载体的姿态。在我们的实际控制当中,我们关心的显然是载体坐标系相对于地理坐标系之间的变化,所以我们通常使用的旋转矩阵是把“地理”坐标系转到“载体”坐标系的矩阵,从而实现对控制目标(载体)的姿态控制。由地理坐标系到载体坐标系的转换常用的有三种方式:四元数、欧拉角、方向余弦矩阵。
坐标转换
导航的基本原则就是保证两个基本坐标系的正确转化,没有误差。只有实现了这个原则,载体才可以在自己的坐标系中完成一系列动作而被转换到地理坐标系中看起来是正确的。导航的基本原则就是保证两个基本坐标系的正确转化,没有误差。只有实现了这个原则,载体才可以在自己的坐标系中完成一系列动作而被转换到地理坐标系中看起来是正确的。
标签:飞机,升力,基础知识,机翼,飞行,导航,坐标系 From: https://www.cnblogs.com/zuti666/p/16965453.html