一、环境配置
我的环境:Ubuntu18.04+melodic
Ubuntu对应的ROS版本:

二、安装步骤
1.添加ROS软件源
输入命令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥
输入命令:
$ sudo apt-key adv --keyserver"'hkp:/ OpenPGP Keyserver' --recv-keyC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.更换软件源
安装之前一定要换源,不然下载特别慢。
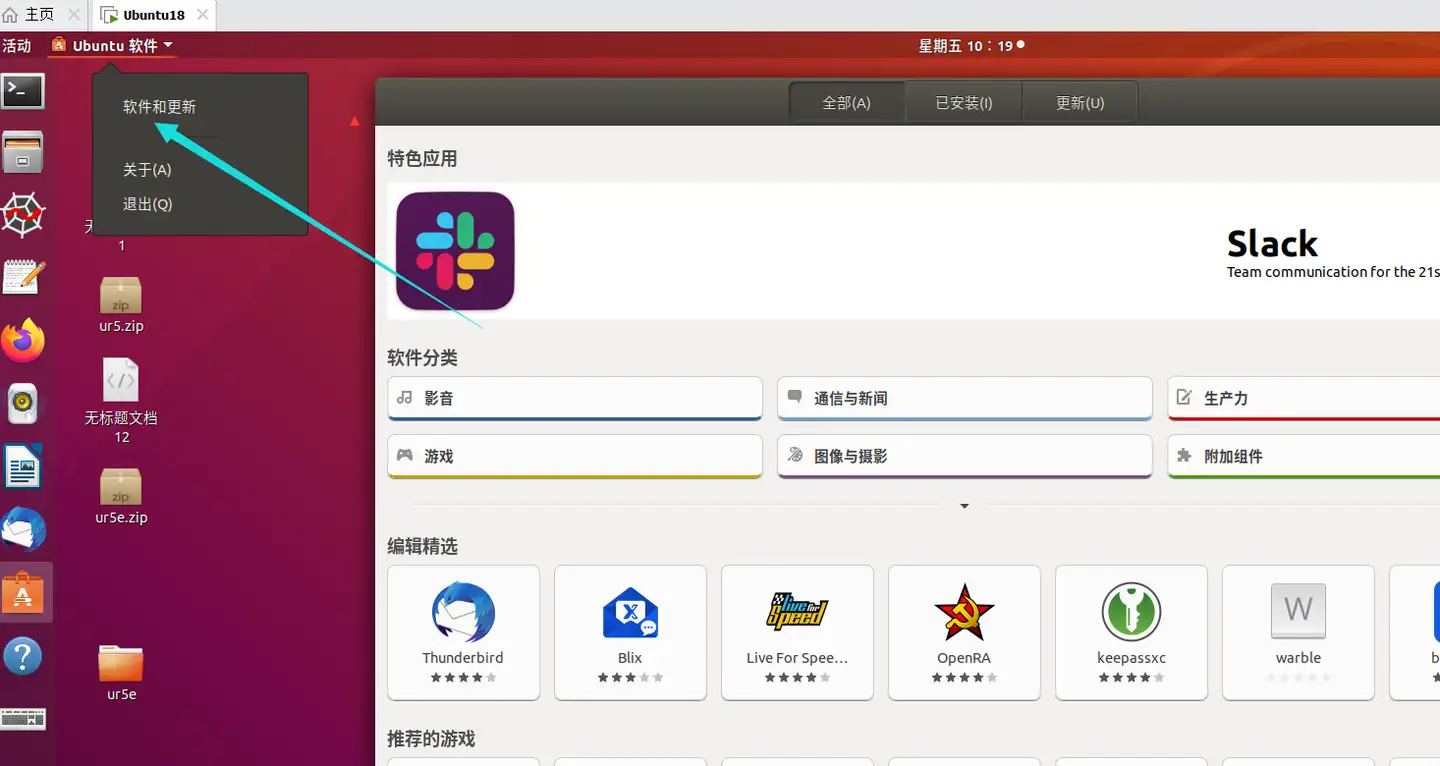
第一步,打开【Ubuntu软件】,点击左上角的软件更新换源
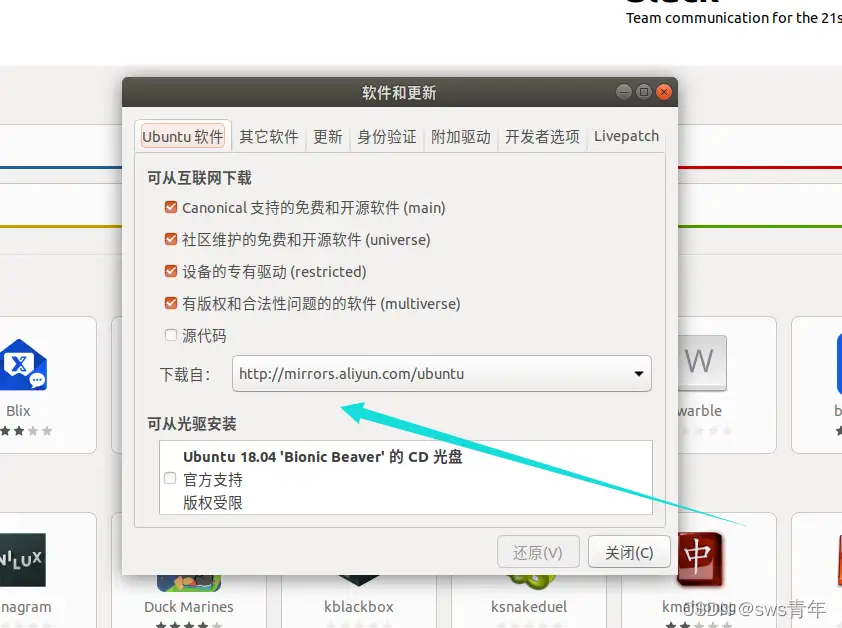
第二步:网址改为箭头所示地址
4.安装ROS
输入命令:
$ sudo apt-get update
$ sudo apt-get install ros-melodic-desktop-full
5.初始化rosdepc
输入命令1:
$ sudo apt-get install python-pip
$ sudo pip install rosdepc
输入命令2:
$ sudo rosdepc init
$ rosdepc update
如果输入命令2后还有没更新成功的,继续执行命令2,第二次应该会成功
6.设置环境变量
输入命令:
$ echo "source /opt/ros/melodic/setup.bash" >>~/.bashrc
$ source~/.bashrc
7.安装 rosinstall
输入命令:
$ sudo apt-get install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
8.验证ROS是否安装成功
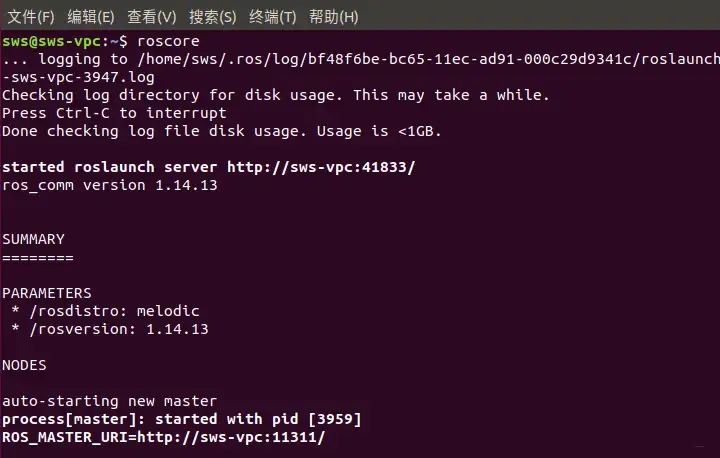
通过运行一个小海龟的例程进行验证,以下每个命令都需要打开一个新终端执行。
输入命令1:
$ roscore
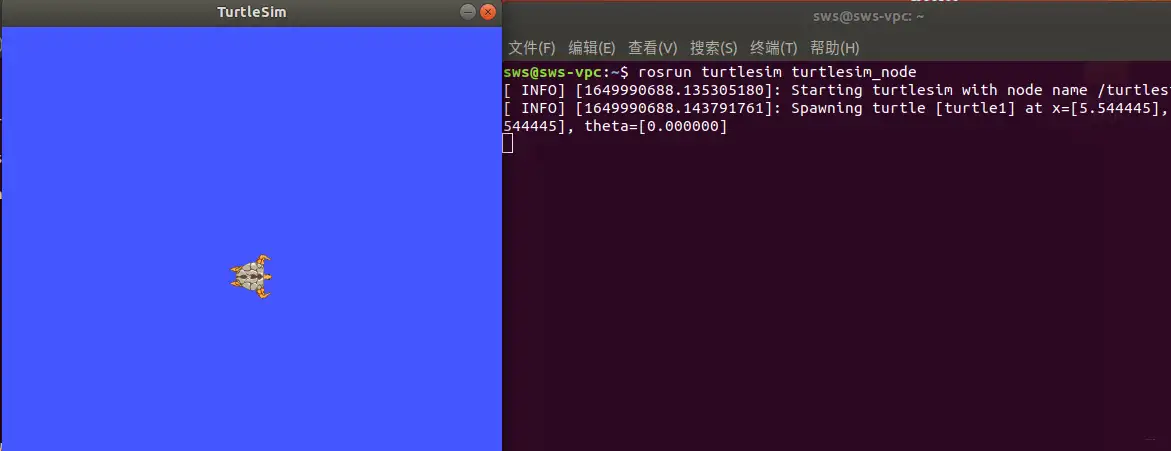
输入命令2:
$ rosrun turtlesim turtlesim_node
输入命令3:
$ rosrun turtlesim turtle_teleop_key
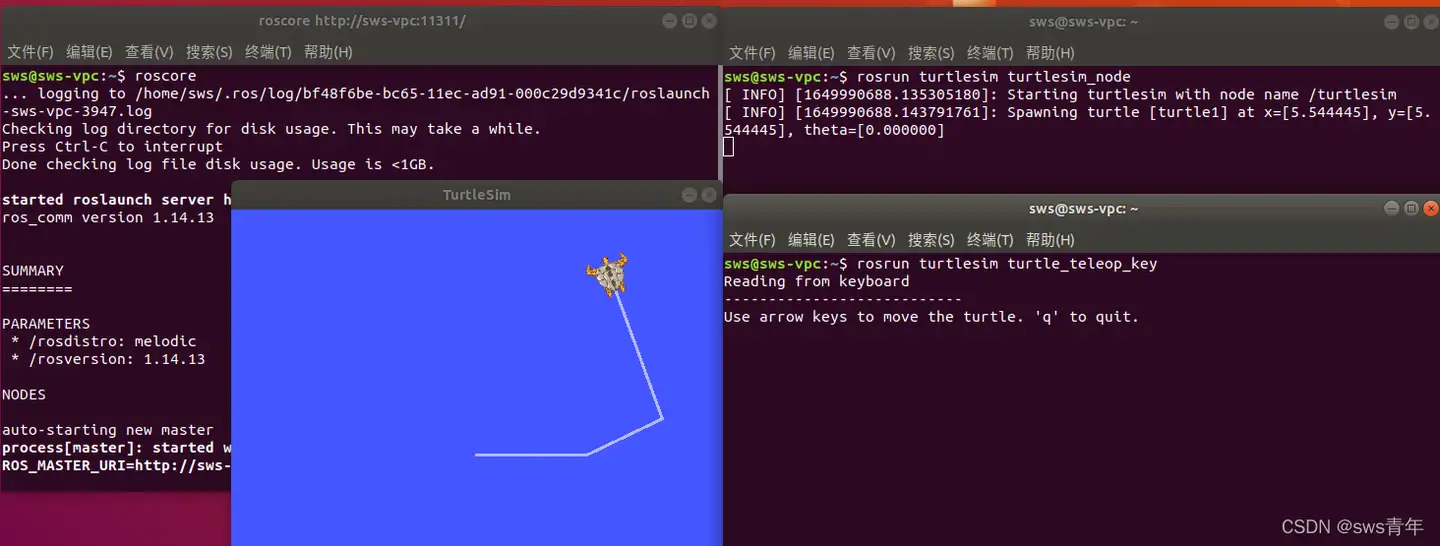
至此,小海龟运行成功,ROS安装成功。
标签:python,sudo,apt,命令,ubuntu18,ros,安装,输入 From: https://www.cnblogs.com/runtimeerror/p/18445589