2.1 更新固件
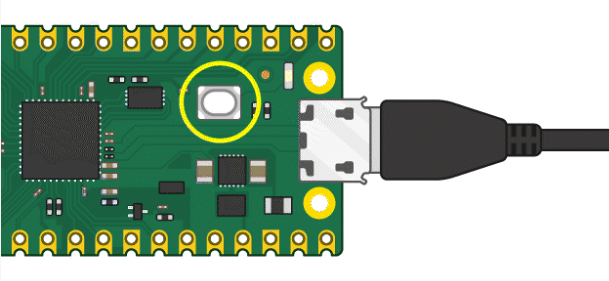
1、按住Pico板上的按键,将pico通过Micro USB线接到电脑的USB接口,然后松开按键。接入之后,电脑会自动识别到一个可移动盘(RPI-RP2)。
2、将 Pico Robot配套资料 -> 附件 -> 固件 -> pico_micropython_20210121.uf2 固件文件,复制拖拽到RPi-RP2移动盘上。
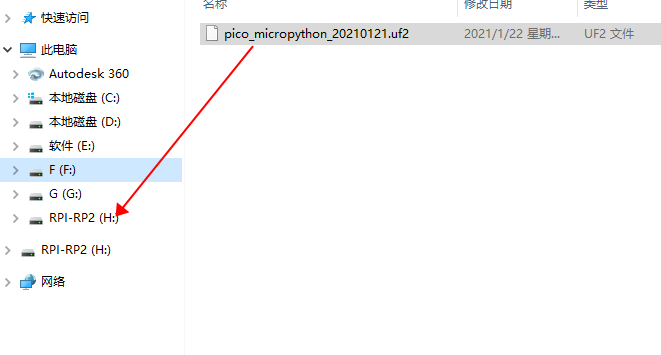
3、复制完成之后,Pico会自动重启, 自动重启之后,pico会被识别为一个串口,此时固件刷入成功。
注意事项:
-
如果在接入pico之后没有自动识别到移动盘?
- 检查是否没有按住BOOTSEL按键,或者中间松开过。
- 使用的Micro USB线必须是数据线,只能供电的USB线不可以用。
-
WIN7系统的用户设备管理器显示Board CDC:
-
1、在Board CDC上右键,选择 更新驱动程序。

2、选择 浏览我的计算机以查找驱动程序软件。
3、选择 Pico Robot配套资料 -> 附件 -> win7出现BOARDCDC所用驱动 文件夹 。
4、点击 下一步 ,等待自动更新结束后就会显示串口。
-
2.2 搭建开发环境
1. Windows软件环境配置
为了方便在电脑上使用MicroPython开发Pico板,建议下载Thonny IDE,可以到官方网址参考官网说讲解的方法安装https://thonny.org/,这里我们直接到 Pico Robot配套资料 -> 附件 -> thonny-window安装包 获取安装包文件 thonny-3.3.3.exe 直接双击安装即可,以下为安装步骤。
1、打开安装包,点击下一步。
2、同意协议,点击下一步。
3、这里根据自己要安装的路径选择。
4、这里打钩是为了安装桌面图标,不要可以不勾选。
5、安装完毕,点击完成。
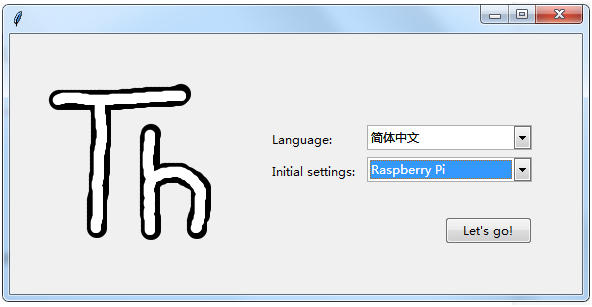
6、打开软件,选择自己需要的语言。
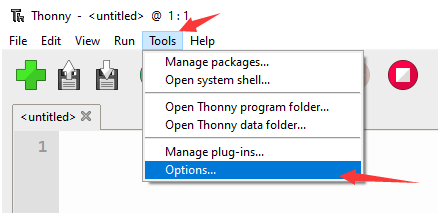
7、将Pico接入电脑(不要按按键),选择Tools -> Options... -> Interpreter。
注意,如果之前没有刷过MicroPython,请先按照 2.1章节 刷入固件
8、在解释器选项中选择Raspberry Pi Pico (注意Thonny的版本, 旧版本没有该选项),并选择对应的端口,然后点击确定。
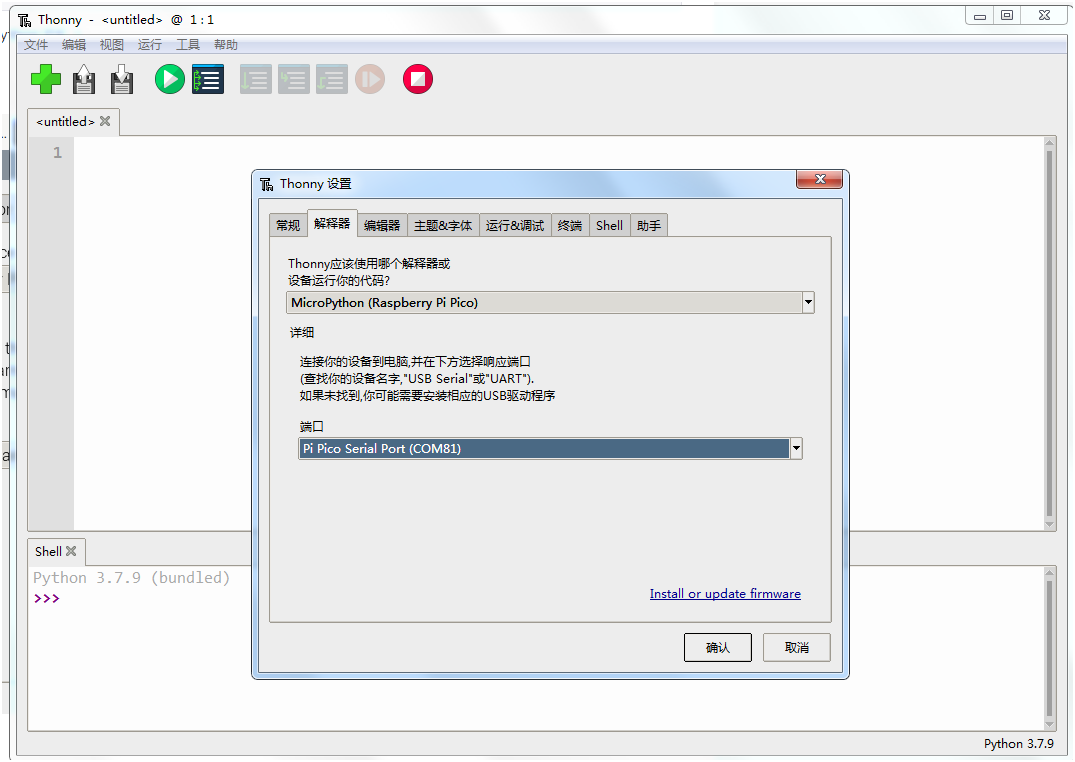
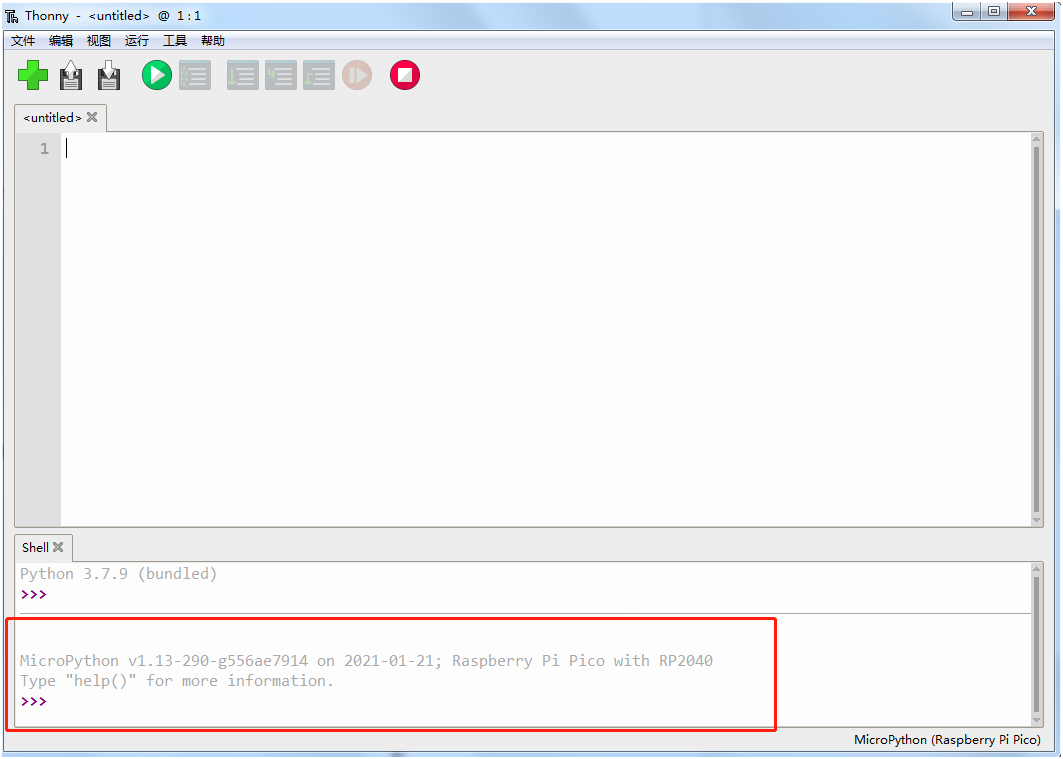
9、确定之后,可以看到在命令行界面会显示Pico的信息,现在就可以在这里输入MicroPython程序控制pico了。
2. 树莓派软件环境配置
如果你要在树莓派上控制Pico,请参考这个配置步骤。当前的Raspberry Pi系统自带Thonny IDE,但是Thonny没有更新到最新版本的话,是没有Pico支持包的,如果是这种情况,需要将Thonny更新最新的v3.3.3版本。
打开终端,输入以下指令更新thonny。
sudo apt upgrade thonny
更新之后即可按照以下步骤使用。
1、接着打开Thonny IDE (点击树莓logo -> Programming -> Thonny Python IDE )。
2、选择Tools -> Options... -> Interpreter。
3、选择MicroPython(Raspberry Pi Pico) 和ttyACM0端口。
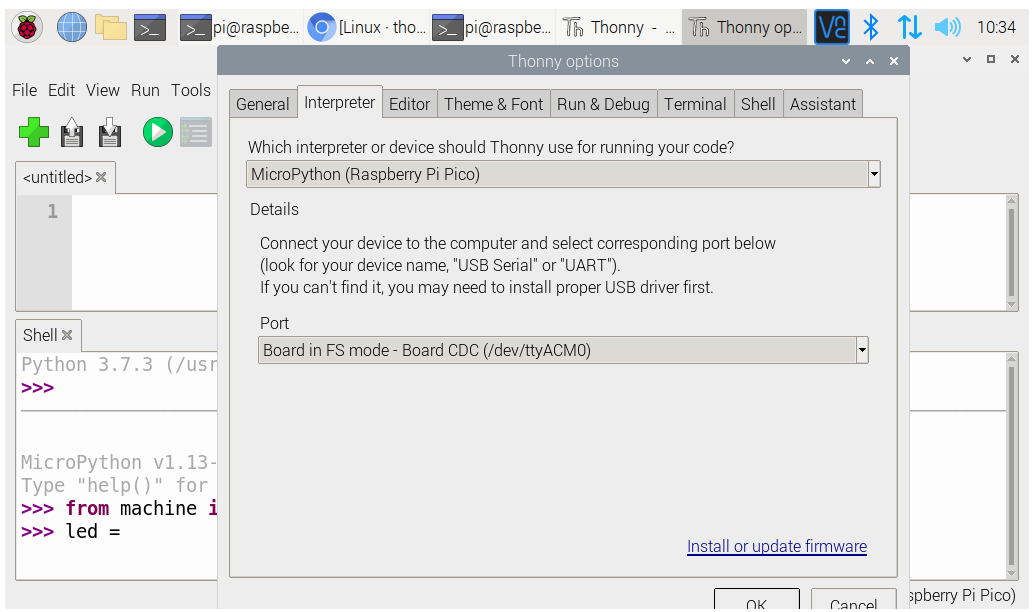
4、点击 OK ,和Windows环境下相同,可以看到在命令行界面会显示Pico的信息,现在就可以在这里输入MicroPython程序控制pico了。
2.3 下载例程和开机自启动
1. 下载例程
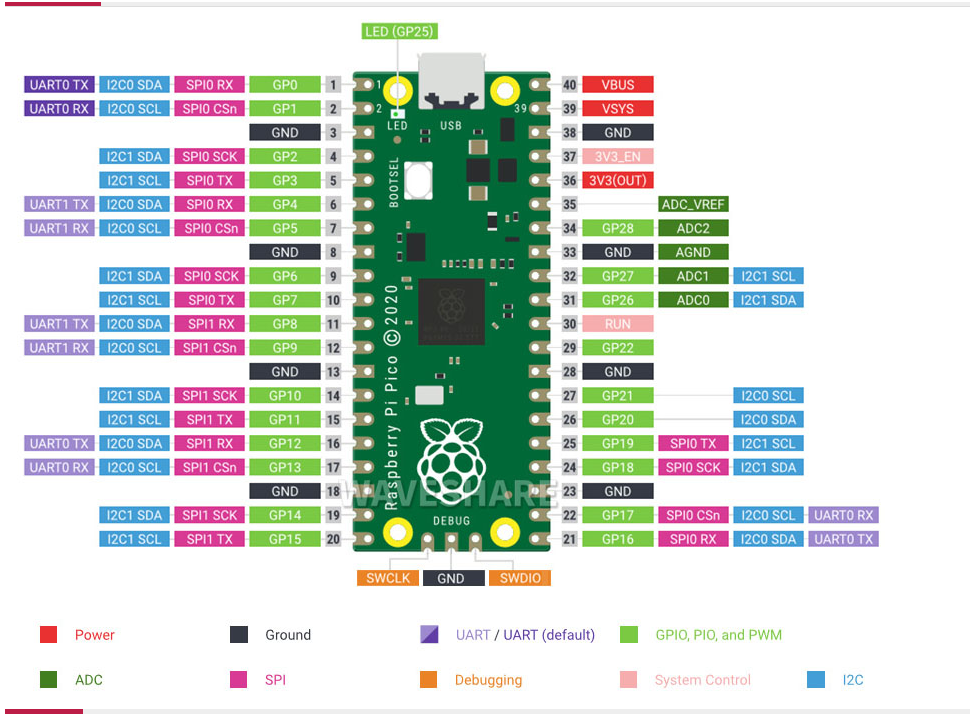
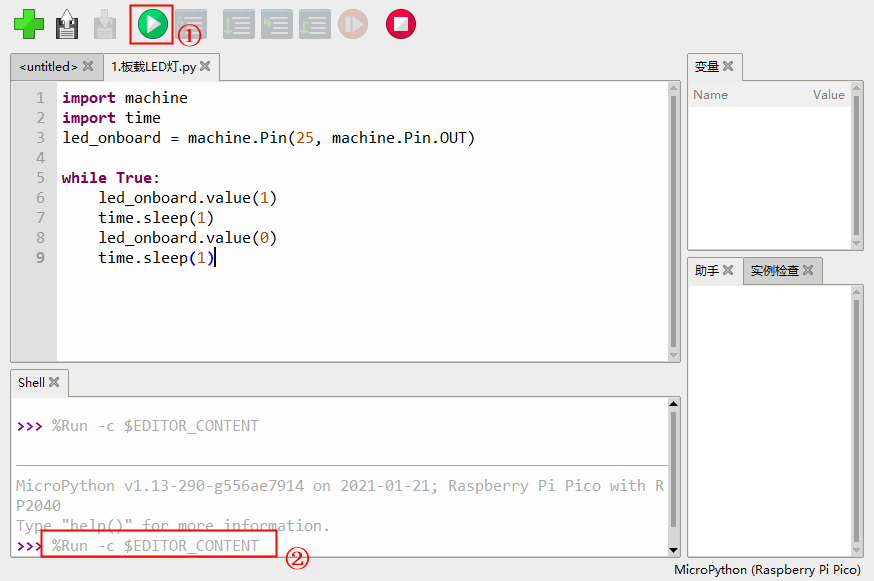
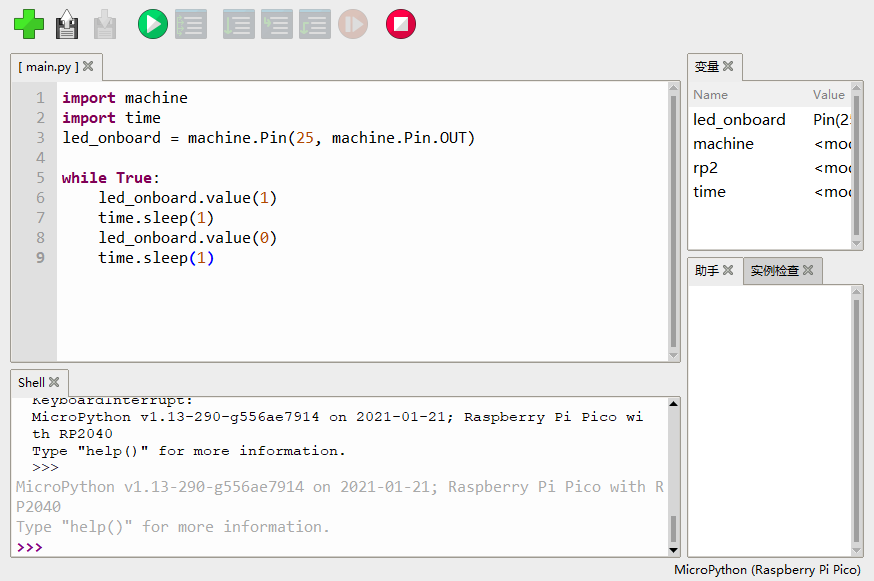
查看Pico的引脚图我们知道Pico的板载LED的控制引脚是GPIO25,这里我们试着控制板载LED。
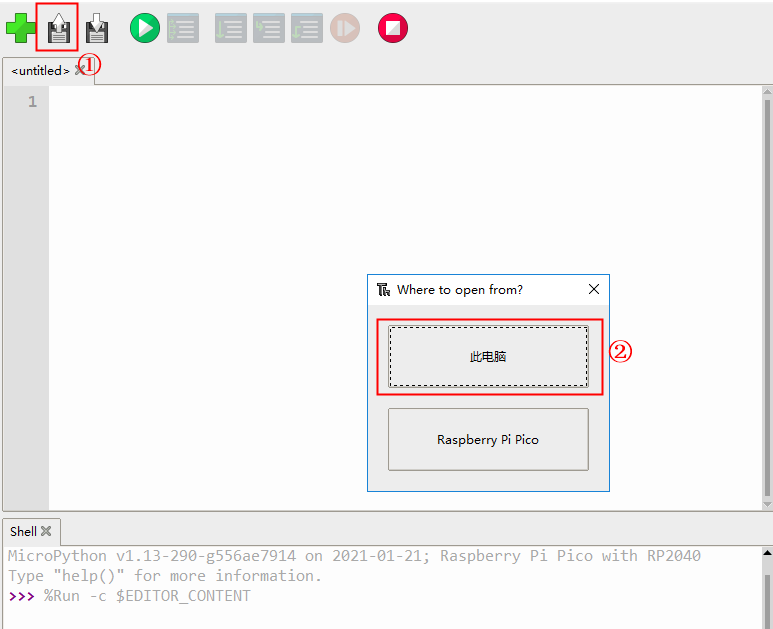
在上一节我们成功连上PICO之后,选择 打开 -- 此电脑。
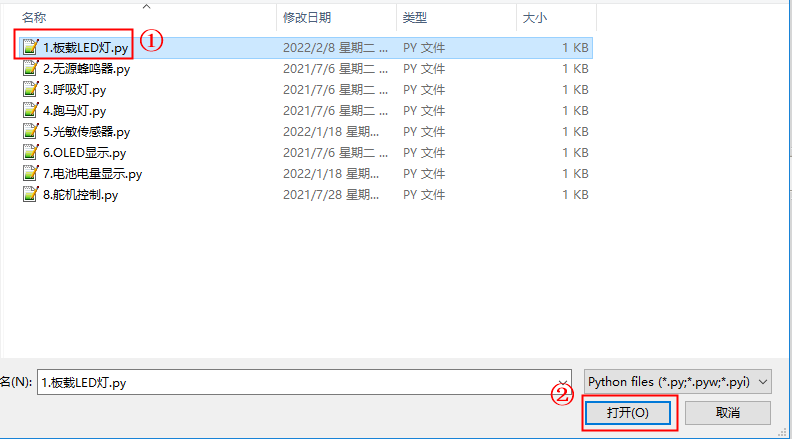
打开 Pico Robot配套资料 -> 附件 -> 课程程序源码 -> 1.基础课程 -> 1.板载LED灯.py。
点击绿色的 运行 按钮,程序开始运行,Shell窗口会显示 %Run -c $EDITOR_CONTENT
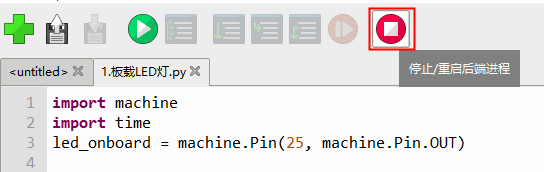
此时,PICO板上的LED会不断循环亮一秒、停一秒。如果点击菜单上的 停止 按钮,或者拔掉与电脑连接的数据线,LED会停止闪烁。
2. 开机启动
上述的程序必须在和电脑相连接的时候才能运行,如果要拔掉数据线运行,就必须把程序文件写入PICO。
提供的例程都可以通过下面的方法设置成开机启动。
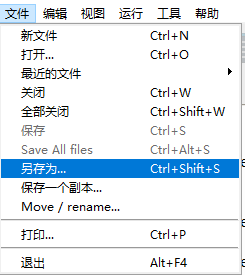
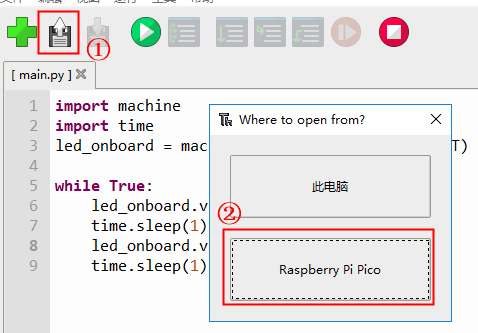
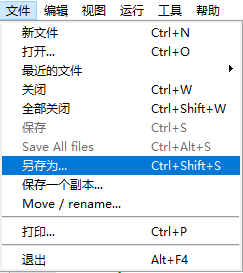
1、继续上一步,在打开的 1.板载LED灯.py 文件中,选择 文件--另存为。
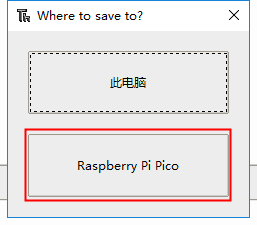
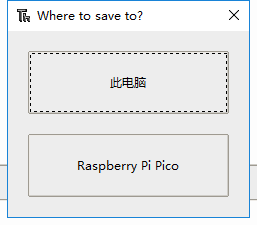
2、选择 Raspberry Pi Pico。
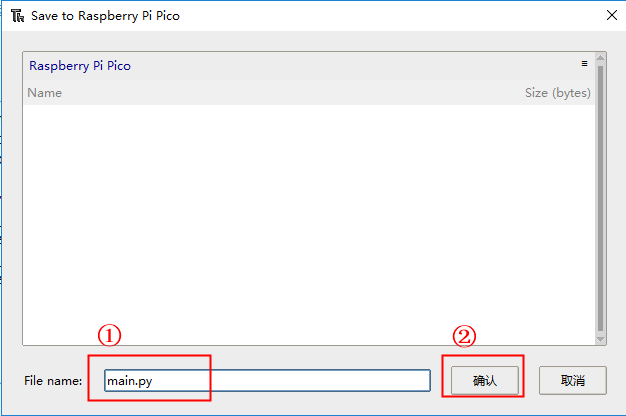
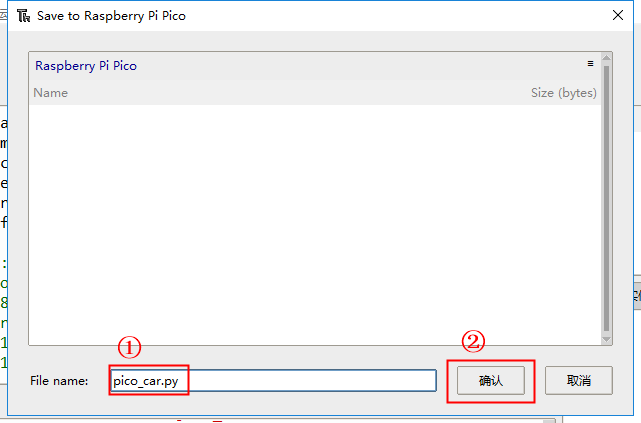
3、File name 里输入 main.py,注意这里必须是main.py的文件名才能启动,然后点击 确认。
4、此时,1.板载LED灯.py 文件就变成了 [main.py],这里的[ ] 是代表文件存在PICO内部。
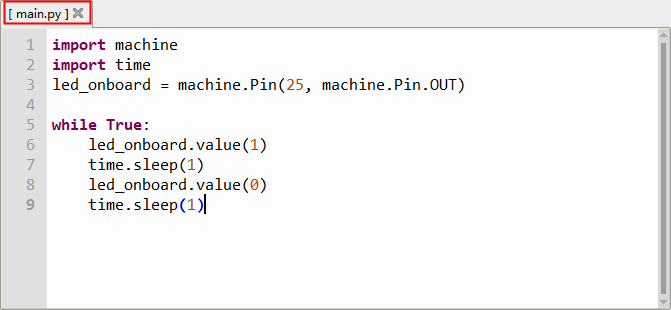
5、此时按下复位键,或者重启一下PICO开发版,板上的LED就会自己闪烁,不需要通过电脑去运行程序。
- 注意,PICO执行开机自启动程序的话,使用电脑连接运行程序会提示开发版正在运行,需要执行以下步骤:
1、连上数据线后,选择 Raspberry Pi Pico

2、此时显示开发版繁忙,根据提示,按下Ctrl+C
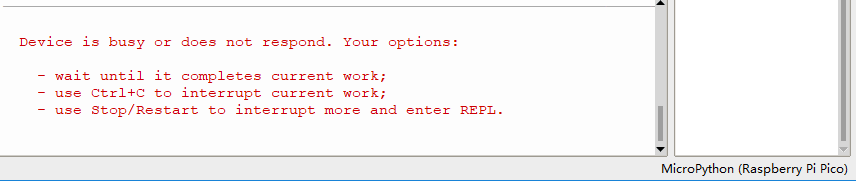
3、此时 main.py 文件不再执行,可以通过thonny去运行程序
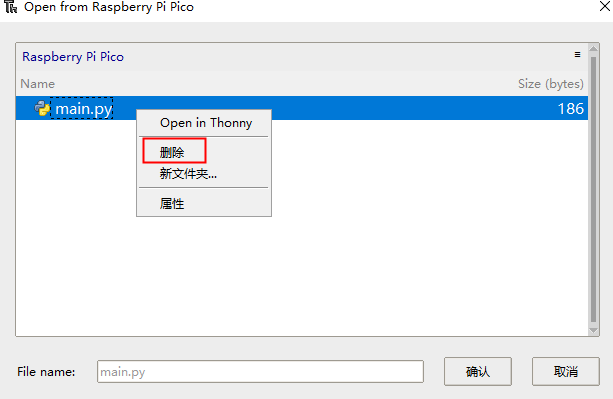
- 如果要去掉开机自启动程序,在按下Ctrl+C之后,点击 打开--Raspberry Pi Pico--在main.py文件上右键--删除 即可。
注意,无法设置请多试几次,或者按照2.1节重刷库文件解决。
2.4 导入库文件
为了方便调用控制板上各种硬件,我们把各种功能封装成库文件,使用的时候只需要调用对应的函数,就可以快速实现对应的功能,下面我们介绍如何把库文件导入到PICO内部。
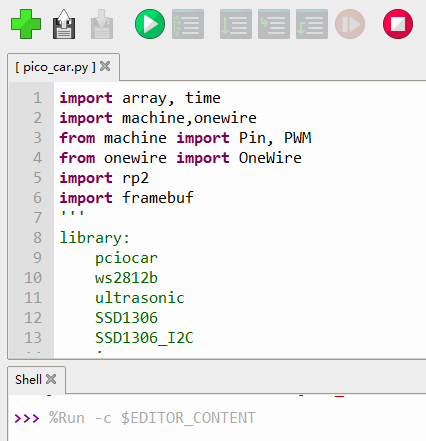
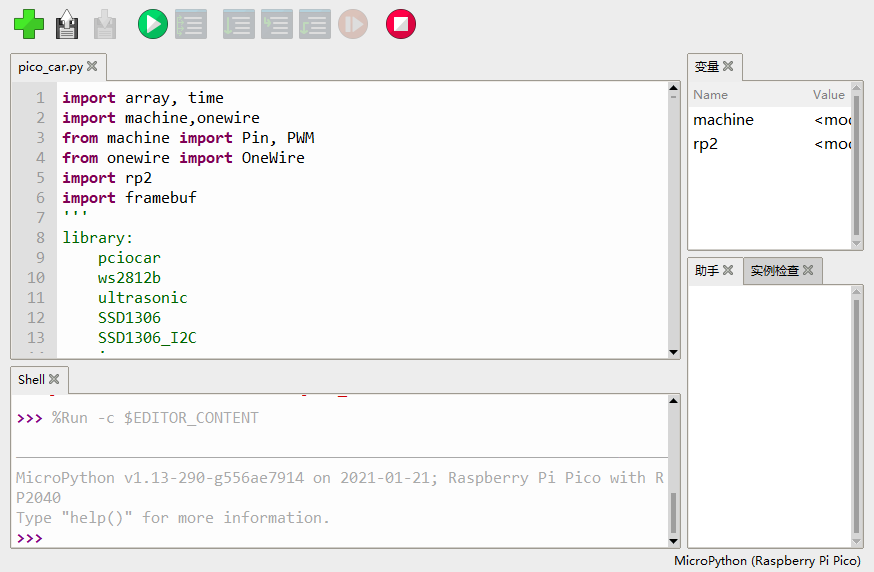
1、库文件导入和上一节建立自启动文件类似,首先打开小车库文件 Pico Robot配套资料 -> 附件 -> 库文件 -> pico_car.py。
2、选择 文件--另存为。
3、选择 Raspberry Pi Pico。
4、File name 里输入 pico_car.py,注意这里必须是pico_car.py的文件名才能被调用,然后点击 确认。
5、此时,pico_car.py 文件就变成了 [pico_car.py],这里的[ ] 是代表文件存在PICO内部,库文件导入成功。