转载
原文 https://blog.csdn.net/kingpower2018/article/details/134365819
RT-Thread内核-RT-Thread SMP 介绍与移植①
RT-Thread内核-RT-Thread SMP 介绍与移植

RT-Thread SMP 介绍与移植
SMP: 对称多处理(Symmetrical Multi-Processing)简称 SMP,是指在一个计算机上汇集了一组处理器 (多 CPU), 各 CPU 之间共享内存子系统以及总线结构。
RT-Thread 自 v4.0.0 版本开始支持 SMP,在对称多核上可以通过使能 RT_USING_SMP 来开启。该文档主要对 SMP 进行介绍,以及讲解如何移植 RT-Thread SMP 。
多核启动
概述
系统上电后,每个 CPU 都会在 ROM 中的代码控制下独自运行,但是只有主处理器(以下简称 CPU0 )跳转到 RT-Thread 的初始化入口处,而其他的处理器(以下简称次级 CPU )则会暂停在某个状态下,等待 CPU0 将它们唤醒。
CPU0 完成 RT-Thread 的全局初始化过程,包括外设初始化、中断控制器的中断分发部分初始化、全局变量的初始化、全局内核对象的创建等等。它还完成 CPU0 自身硬件初始化,包括 MMU 、中断控制器的 CPU 接口部分,以及中断向量表等。
最终,CPU0 在执行 main 线程之前,唤醒其它的次级 CPU,引导它们执行次级 CPU 的初始化代码,这段代码会让各个次级 CPU 去完成自身相关的硬件初始化,并开启任务调度。
此后,系统进入正常运行阶段。系统启动阶段各个 CPU 的动作如下图所示:
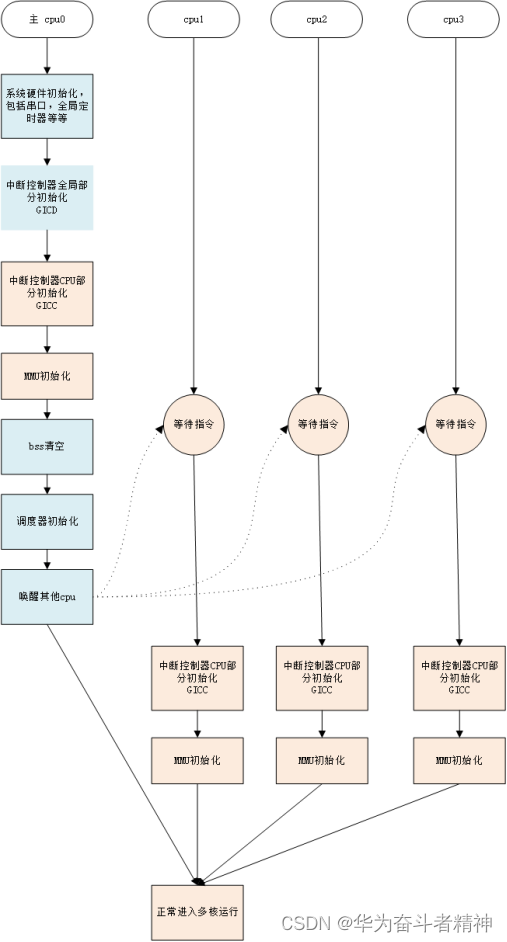
值得注意的是,每个次级 CPU 自身硬件部分的初始化不能由 CPU0 完成,因为其自身硬件不能由其它 CPU 访问。
CPU0 启动流程
在 SMP 平台上,启动核心 CPU0 的启动流程和单核 CPU 上的启动过程相同,主要流程如下图所示:
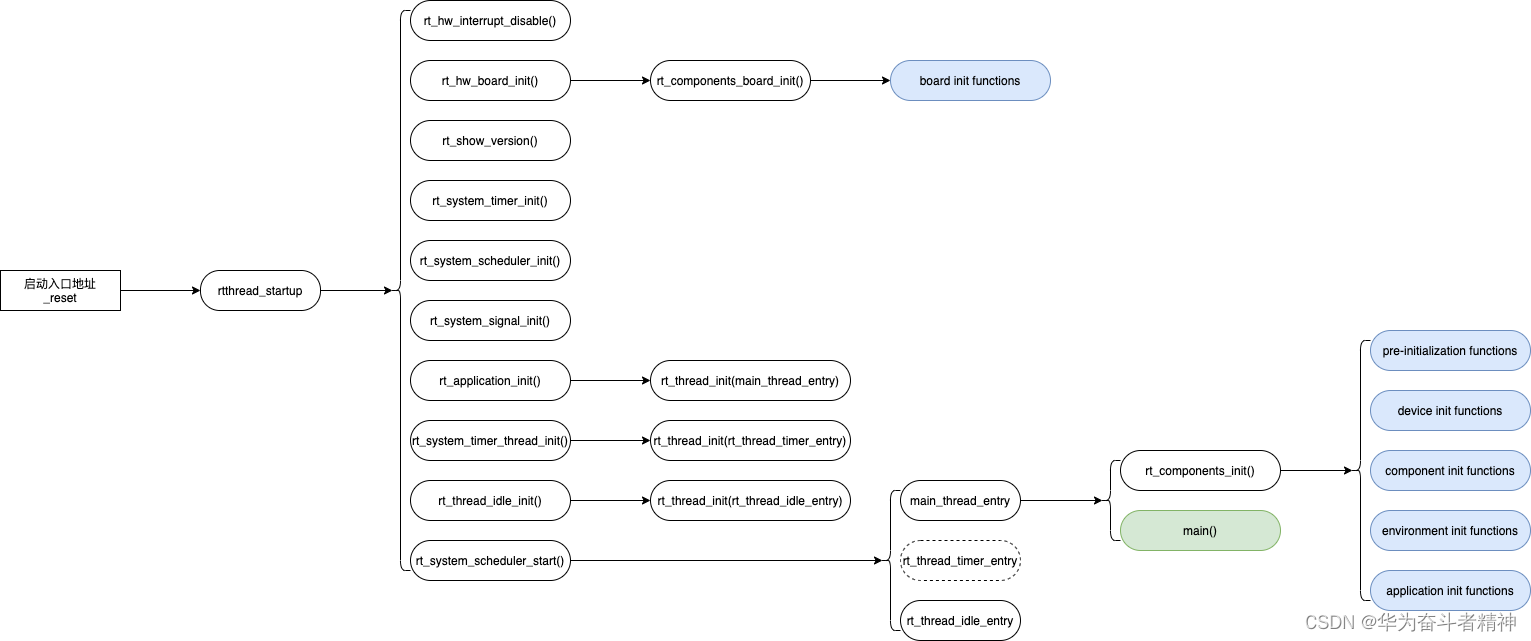
由于硬件平台和编译器的不同,系统上电后执行的初始化代码和启动流程并不相同,但是系统最终统一调用入口函数 rtthread_startup() 来启动 RT-Thread 。该函数设置硬件平台、初始化操作系统各组件、创建用户 main 线程,并最终开启当前 CPU 的任务调度机制,开始正常工作。
当开启了 CPU0 的任务调度器之后,CPU0 上通常存在两个线程:main 线程和 idle 线程,用户可以通过修改配置选项或者通过 RT-Thread 提供的接口创建新的线程,调度器依据优先级和线程状态从中选择就绪线程执行。
次级 CPU 启动流程
如果定义了配置选项 RT_USING_SMP ,CPU0 的 main 线程在运行过程中会执行函数 rt_hw_secondary_cpu_up() 以启动其它 CPU 核心。该函数由移植内核的开发人员提供,完成以下两个操作:
设置次级 CPU 的启动入口地址;
加电启动次级 CPU 。
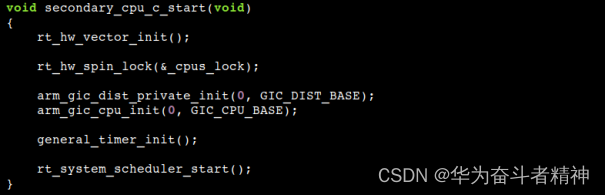
在 ARMv7-A 中,次级 CPU 的启动入口地址固定设置为 secondary_cpu_start ,该标号定义在文件 libcpu/arm/cortex-a/start_gcc.S 中,主要步骤包括设置当前 CPU 的内核栈,建立 MMU 内存映射表,然后跳转到函数 secondary_cpu_c_start() 执行。 函数 secondary_cpu_c_start() 是所有次级 CPU 的初始化函数,它同样与硬件平台密切相关,由移植系统的开发者提供,需要完成以下步骤:
初始化当前 CPU 的中断控制器,设置中断向量表;
设置定时器为当前 CPU 产生 tick 中断;
获取内核自旋锁 _cpus_lock 以保护全局任务表,调用函数 rt_system_scheduler_start() 开启当前 CPU 的任务调度器。
全志 T3 芯片采用 GIC 中断控制器,系统通过 Generic Timer 定时器提供 tick 中断计数,函数 secondary_cpu_c_start() 代码如下:
每个次级 CPU 启动之后,从全局任务表和当前 CPU 的局部任务表中选取优先级最高的任务执行,在优先级相同的情况下,优先选择当前 CPU 的局部任务表中的任务执行。
在不存在其它任务的情况下,每个 CPU 调度自己的 idle 任务执行。其中,CPU0 的 idle 任务循环执行函数 rt_thread_idle_execute() ,而次级 CPU 的 idle 任务循环执行函数 rt_hw_secondary_cpu_idle_exec() 。后者同样需要移植系统的开发者提供,实例代码如下:

多核调度
任务特性
RT-Thread 中的任务分为以下状态:
- 运行态:任务正在某个 CPU 上执行;
- 就绪态:任务随时可以被执行,但尚未分配到 CPU ,因此等待在某个就绪态任务表中;
- 挂起态:任务因为条件不满足(等待超时或者数据到来等),而不能够被执行;
- 关闭态:任务已经被删除,正在等待被回收。
在进入正常运行阶段后,每个 CPU 都独自地运行中断处理、调度器以及任务的代码。RT-Thread 在多核系统上运行时存在以下特性:
同一时刻,一个任务(线程)只会运行在一个 CPU 上;
每个 CPU 互斥地访问全局调度器数据,以确定将要在当前 CPU 上运行的任务;
支持将任务绑定在某一个 CPU 上运行。
调度策略
为了实现上述目标,RT-Thread 调度器实现了两种就绪任务队列:
- 全局就绪任务表 rt_thread_ready_table[] ,包含没有绑定 CPU 的就绪任务;
- CPU 局部就绪任务表 ready_table[] ,每个 CPU 对应一个,包含绑定到对应 CPU 的就绪任务。典型的 CPU 绑定任务是每个 CPU 自己的 idle 任务。
当 CPU 需要切换任务执行时,任务调度器查找系统中优先级最高的就绪任务执行,即全局就绪任务表和当前 CPU 的局部就绪任务表中优先级最高的任务。在优先级相同的情况下,优先选取局部任务表中的任务。
相对应的是,如果一个任务由其它状态变为就绪态,则进行如下处理:
- 如果它不是 CPU 绑定任务,则把它挂入全局就绪表,并向其它的所有 CPU 发送 IPI 中断,通知它们检查是否需要切换任务,因为其它 CPU 的当前任务的优先级可能低于此就绪态任务,因而会发生优先级抢占;
- 如果它是一个 CPU 绑定任务,检查它是否比对应 CPU 的当前任务优先级高,如果是则发生优先级抢占,否则把它挂入对应 CPU 的局部就绪任务表。整个过程不通知其它 CPU 。
SMP 内核接口
为支持 SMP 平台,RT-Thread 提供以下内核接口,以方便内核开发人员使用多核的功能。
处理器间中断 IPI
当单个 CPU 上运行的任务改变了系统状态,或者触发了某个事件,需要通过处理器间中断(Inter-Processor Interrupt)通知其它 CPU ,其它 CPU 在收到该信号后,调用注册的相应例程进行处理。
RT-Thread 提供如下 IPI 接口:
void rt_hw_ipi_send(int ipi_vector, unsigned int cpu_mask)- 1
该函数用来向 CPU 位图中表示的 CPU 集合发送指定编号的 IPI 信号。
void rt_hw_ipi_handler_install(int ipi_vector, rt_isr_handler_t ipi_isr_handler)- 1
该函数为当前 CPU 设置指定编号 IPI 信号的处理函数。
OS Tick
在 SMP 系统中,每个 CPU 维护自己独立的 tick 值,用作任务运行计时以及时间片统计。除此之外,CPU0 还通过 tick 计数来更新系统时间,并提供系统定时器的功能,次级 CPU 不需要提供这些功能。
在初始化次级 CPU 的过程中,每个 CPU 需要使能各自的 tick 定时器,并注册相应的 tick 中断处理函数。使能 tick 定时器的操作与具体的硬件平台相关,需要移植内核的开发者提供;而 tick 中断处理函数主要完成两个动作:
- 设置 tick 定时器的状态。
- 增加当前 CPU 的 tick 计数。
自旋锁 spinlock
在 SMP 系统中,通过关中断的方式不能阻止多个 CPU 对共享资源的并发访问,需要通过自旋锁机制进行保护。和互斥锁类似,在任何时刻,自旋锁最多只能有一个保持者,也就说,在任何时刻最多只能有一个执行单元获得锁。不同的是,对于互斥锁,如果资源已经被占用,资源申请者只能进入睡眠状态。而自旋锁不会引起调用者睡眠,而是循环查询直到该自旋锁的保持者已经释放了锁。
RT-Thread 提供自旋锁接口:
1、如下函数初始化已分配的 spinlock 变量:
void rt_spin_lock_init(struct rt_spinlock *lock)- 1
2、如下函数获取 spinlock,忙等待直到获取成功:
void rt_spin_lock(struct rt_spinlock *lock)- 1
3、如下函数释放 spinlock :
void rt_spin_unlock(struct rt_spinlock *lock)- 1
4、如下函数禁止当前 CPU 中断后获取 spinlock,忙等待直到获取成功,返回之前的中断状态:
rt_base_t rt_spin_lock_irqsave(struct rt_spinlock *lock)- 1
5、如下函数释放 spinlock ,并恢复之前的中断状态:
void rt_spin_unlock_irqrestore(struct rt_spinlock *lock, rt_base_t level)- 1
任务绑定
通常系统中的就绪任务位于全局就绪任务表中,每个任务在哪个 CPU 上调度运行是随机的。通过将就绪任务放入到某个 CPU 局部就绪任务列表中,RT-Thread 允许将任务与 CPU 绑定,即该任务只能够在指定的 CPU 上。
RT-Thread 提供的任务绑定接口如下:
rt_err_t rt_thread_control (rt_thread_t thread, int cmd, void *arg)- 1
当参数 cmd 的值为 RT_THREAD_CTRL_BIND_CPU 时,函数将线程 thread 绑定到参数 arg 指定的 CPU 上。
移植说明
为了将 RT-Thread 系统移植到其它 SMP 平台上,需要创建相应的 BSP ,编写底层代码。这里我们以全志 T3 芯片(四核 Cortex-A7 )为模版,说明 RT-Thread 在多核 Cortex-A 平台上的移植步骤。内核开发者可参考这些步骤将 RT-Thread 移植到其它多核 Cortex-A 芯片上运行。
编译环境准备
RT-Thread 使用 scons 工具进行编译和配置,以操作系统 Ubuntu 18.04 为例说明编译环境,需要安装以下软件包:
- lib32ncurses5
- lib32z1
- python
- scons
- python-pip
- make
- zlib1g-dev
- binutils-arm-none-eabi
创建 BSP 目录及文件模版
当向其它 SMP 平台移植时,可使用全志 T3 BSP 做为模版,复制文件夹 bsp/allwinner_t3/ ,名字更改为目标平台,例如 bsp/some_cortexa_smp ,保留以下文件:
- Kconfig:BSP 配置说明文件,用来组织 BSP 的配置选项
- link.lds:生成 BSP 可执行文件所使用的链接文件
- .config:BSP 配置结果文件,提供默认的配置选项
- SConscript:scons 配置文件,和子目录的 SConscript 文件一起记录待编译的源文件
- SConstruct:scons 配置文件,用来设置 BSP 编译环境
- applications/main.c:提供用户代码入口 main 函数
- drivers/:
- board.c 和 board.h:包含 PCB 板上的初始化代码
- drv_clock.c 和 drv_clock.h:包含时钟树设置代码
- platsmp.c 和 platsmp.h:包含 SMP 启动代码
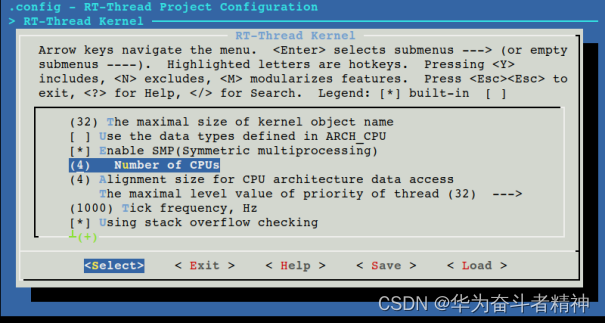
配置 SMP 核心数量
进入 BSP 目录 bsp/allwinner_t3 运行命令 scons --menuconfig 配置 BSP 的核心数量,修改配置选项 RT_CPUS_NR ,将该值修改为实际的 SMP 核心数量,如下图所示:
配置 MMU 映射的地址范围
RT-Thead 采用直接映射的方式,内核和所有任务共享同一个地址空间,物理内存地址和设备寄存器地址空间采用不同的映射属性,但是映射的虚拟地址和物理地址相一致。
系统在初始化过程中,参照数组 platform_mem_desc[] 的设置建立系统唯一的 MMU 映射表。数组中每一项对应一个地址映射范围的描述,其中的元素依次为起始物理地址、结束物理地址、起始虚拟地址和映射属性。
该 MMU 映射配置数组定义在文件 drivers/board.c 中。以全志 T3 为例,其 DDR 内存起始地址为 0x40000000 ,结束地址为 0xC0000000;而设备地址范围从 0x01000000 到 0x40000000 ,因此数组 platform_mem_desc[] 的内容如下:

设置内核加载地址
编译生成的内核镜像通常加载到内存的起始地址执行,内核链接时所使用的起始地址要和该值保持一致,该地址由链接脚本 link.lds 决定。以全志 T3 为例,DDR 内存起始地址为 0x40000000 ,因此内核镜像的加载地址也设置为 0x40000000 ,内容如下:
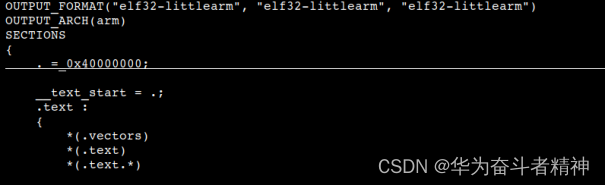
移植时,将该值修改为内核镜像的实际加载地址,通常为物理内存的起始地址。
实现次级 CPU 的启动代码
按照上面次级 CPU 启动过程的描述,在将 RT-Thread 移植到其它 ARMv7-A SMP 芯片的过程中,内核开发者需要提供以下三个函数:
-
rt_hw_secondary_cpu_up(), 该函数设置次级 CPU 的启动入口地址为 secondary_cpu_start ,加电启动其它 CPU 核心;
-
secondary_cpu_c_start(), 该函数用来初始化单个次级 CPU ,主要包括初始化中断控制器接口,设置中断向量表,以及当前 CPU 的 tick 中断。最后获取内核自旋锁 _cpus_lock ,并调用函数 rt_system_scheduler_start() 开启当前 CPU 的任务调度器;
-
rt_hw_secondary_cpu_idle_exec(), 该函数被次级 CPU 的 idle 线程循环调用,可用来做功耗相关的处理。
上述三个函数定义在文件 drivers/platsmp.c 中。其中,只有函数 rt_hw_secondary_cpu_up() 的功能实现与芯片密切相关,需要移植者根据芯片特性提供。如果芯片使用的不是 GIC 中断控制器和 Generic Timer 定时器,那么同样需要重新实现函数 secondary_cpu_c_start() 。
需要注意的是,在全志 T3 平台上,Generic Timer 的工作频率为 24 MHZ ,tick 的频率为 1000 ,所以中断间隔寄存器 CNTP_TVAL 设置为 24M / 1000 = 24000 。在 tick 的中断处理代码中需要重新设置间隔寄存器,代码如下:
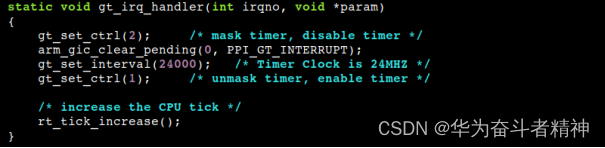
该值在每次 tick 中断被触发时重新设置,中断处理代码见上面 OS tick 的说明。如果目标平台的工作频率与上述值不一致,修改函数 gt_set_interval() 的参数进行设置。
我有疑问: 1992152446@qq.com
文章知识点与官方知识档案匹配,可进一步学习相关知识 Java技能树首页概览140088 人正在系统学习中 标签:RT,rt,Thread,SMP,任务,CPU From: https://www.cnblogs.com/zxdplay/p/18009623