Robot Breakout(CF1196C)
思路
这道题因为平面极大,暴力枚举每个点肯定会超时。所以,我们不妨从机器人出发。
我们可以枚举每个机器人可以执行的操作:
-
位置从 \((X_i,Y_i)\) 变为 \((X_i-1,Y_i)\),即向左走。
-
位置从 \((X_i,Y_i)\) 变为 \((X_i,Y_i+1)\),即向上走。
-
位置从 \((X_i,Y_i)\) 变为 \((X_i+1,Y_i)\),即向右走。
-
位置从 \((X_i,Y_i)\) 变为 \((X_i,Y_i-1)\),即向下走。
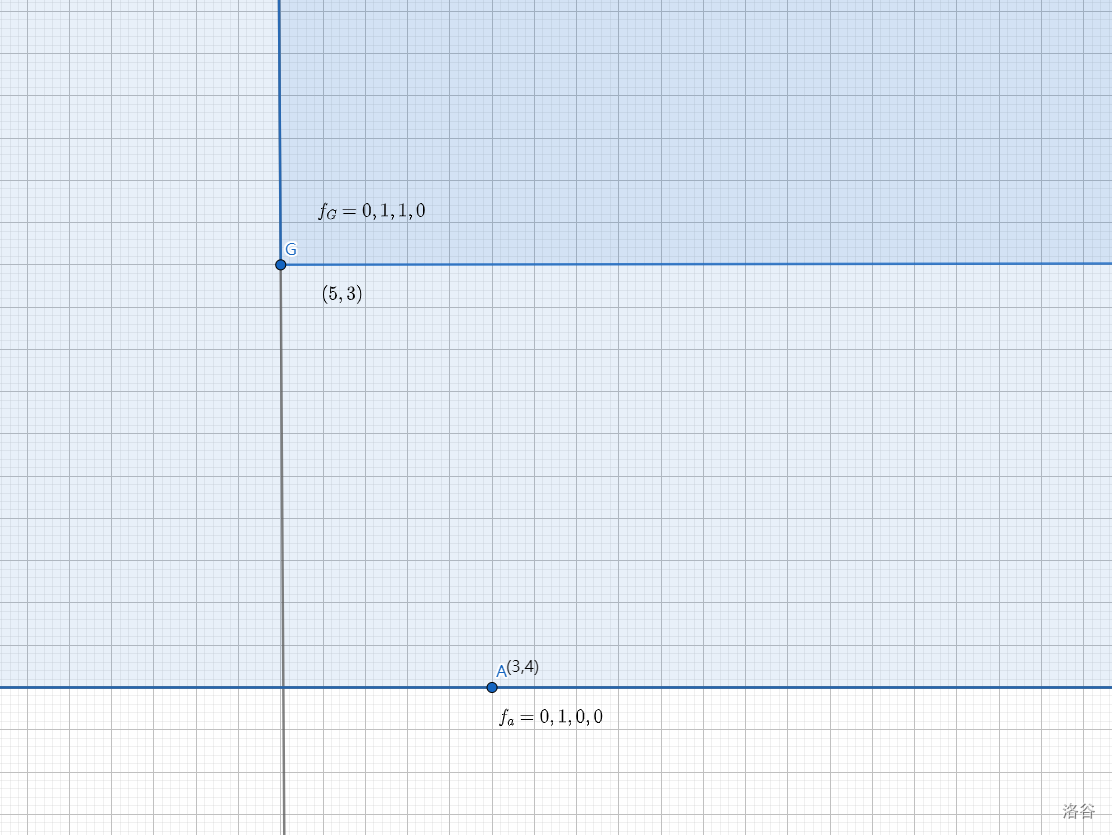
如果一个机器人执行不能执行操作 \(4\),那么下图的蓝色区域为该机器人的行动范围:

那么很多个机器人,它们的集合点就应该是这些区域的相交处:
我们便可以用变量 \(up,down\) 储存集合点 \(y\) 坐标的上下界,\(left,right\) 储存集合点 \(x\) 坐标的上下界。
如果当前机器人,无法下行,则 \(down=\max(down,a_iy)\);
如果当前机器人,无法左行,则 \(left=\max(left,a_ix)\);
如果当前机器人,无法下行,则 \(up=\min(up,a_iy)\);
如果当前机器人,无法左行,则 \(right=\min(up,a_ix)\);
Code
#include<bits/stdc++.h>
#define int long long
using namespace std;
const int MAXN = 1e5 + 5;
int n;
struct bot {
int x, y;
int f[5];
} a[MAXN];
int r=1e5, up=1e5, l=-1e5, down=-1e5;
void work(){
r=1e5, up=1e5, l=-1e5, down=-1e5;
scanf("%lld", &n);
for (int i = 1; i <= n; i++) {
scanf("%lld", &a[i].x);
scanf("%lld", &a[i].y);
for (int j = 1; j <= 4; j++) {
scanf("%lld", &a[i].f[j]);
}
if(a[i].f[1]==0){//不能向左走
l=max(l,a[i].x);
}
if(a[i].f[2]==0){//不能向上走
up=min(up,a[i].y);
}
if(a[i].f[3]==0){//不能向右走
r=min(r,a[i].x);
}
if(a[i].f[4]==0){//不能向下走
down=max(down,a[i].y);
}
}
if(l<=r&&down<=up) printf("1 %lld %lld\n",l,down);
else printf("0\n");
}
signed main() {
int q;
scanf("%lld",&q);
while(q--){
work();
}
return 0;
}