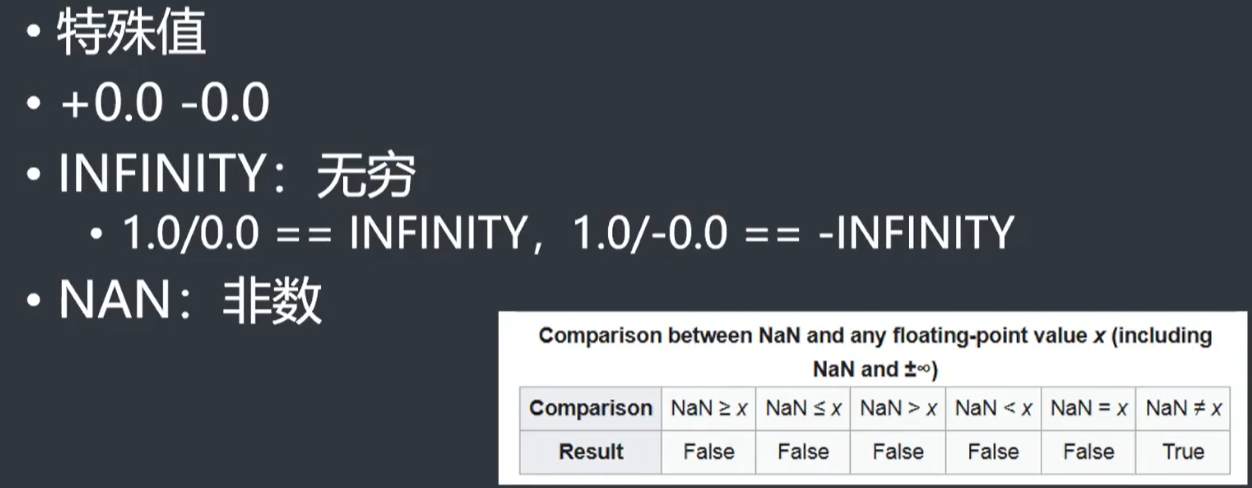
前置知识
- 浮点数与精度问题
- 若问题能用整数解决则不用浮点数
- 别用\(float\),视情况用\(long\ double\)
- 减少数学函数的使用(开方、三角函数)
- 比较时加入容限,即\(eps\)
点
const double PI = acos(-1.0);
const double eps = 1e-9;
struct Point
{
double x, y;
Point(double x = 0, double y = 0) : x(x), y(y){};
Point operator+(Point t)
{
return Point(x + t.x, y + t.y);
}
Point operator-(Point t)
{
return Point(x - t.x, y - t.y);
}
Point operator*(double k)
{
return Point(x * k, y * k);
}
Point operator/(double k)
{
return Point(x / k, y / k);
}
bool operator==(Point t)
{
return sgn(x - t.x) == 0 && sgn(y - t.y) == 0;
}
};
typedef Point Vector;
int sgn(double x)
{
if (fabs(x) < eps)
return 0;
else
return x < 0 ? -1 : 1;
}
int dcmp(double x, double y)
{
if (fabs(x - y) < eps)
return 0;
else
return x < y ? -1 : 1;
}
向量
- 直接用\(Point\)表示即可
typedef Point Vector;
点积
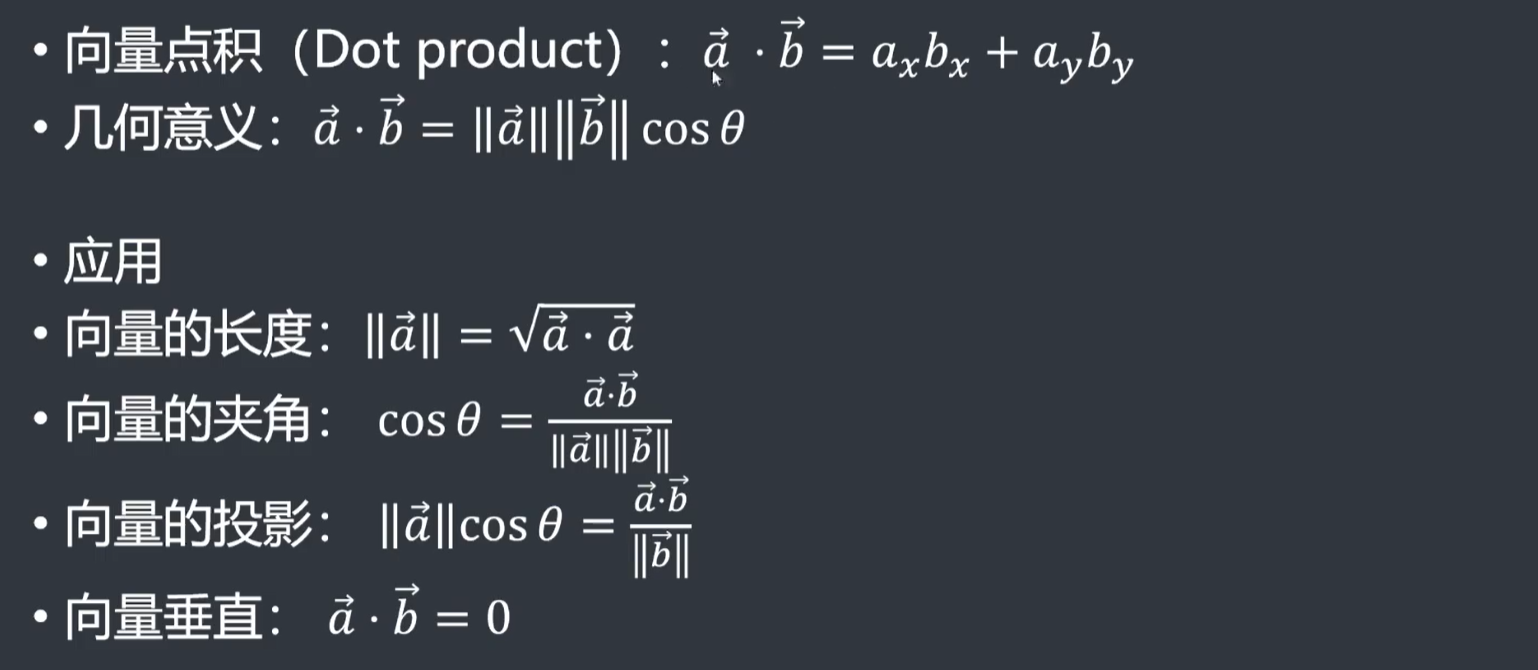
double dot(Vector &a, Vector &b)
{
return a.x * b.x + a.y * b.y;
}
叉积
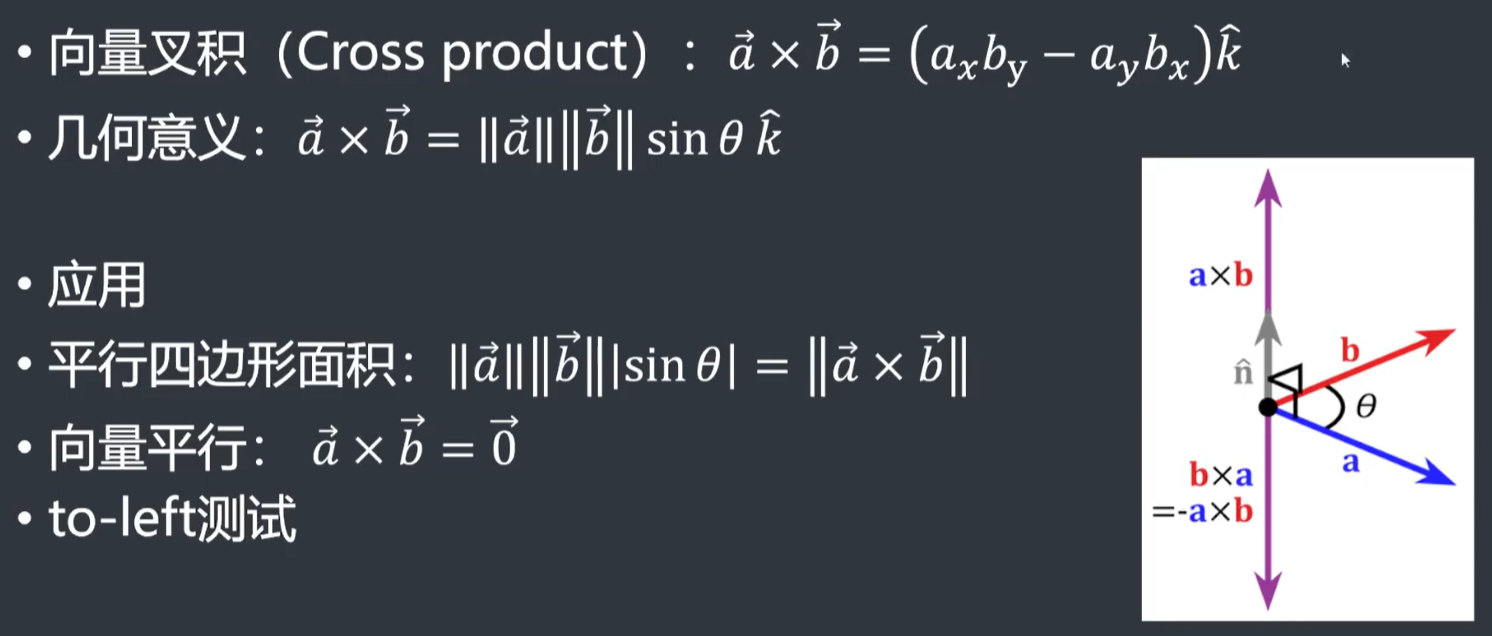
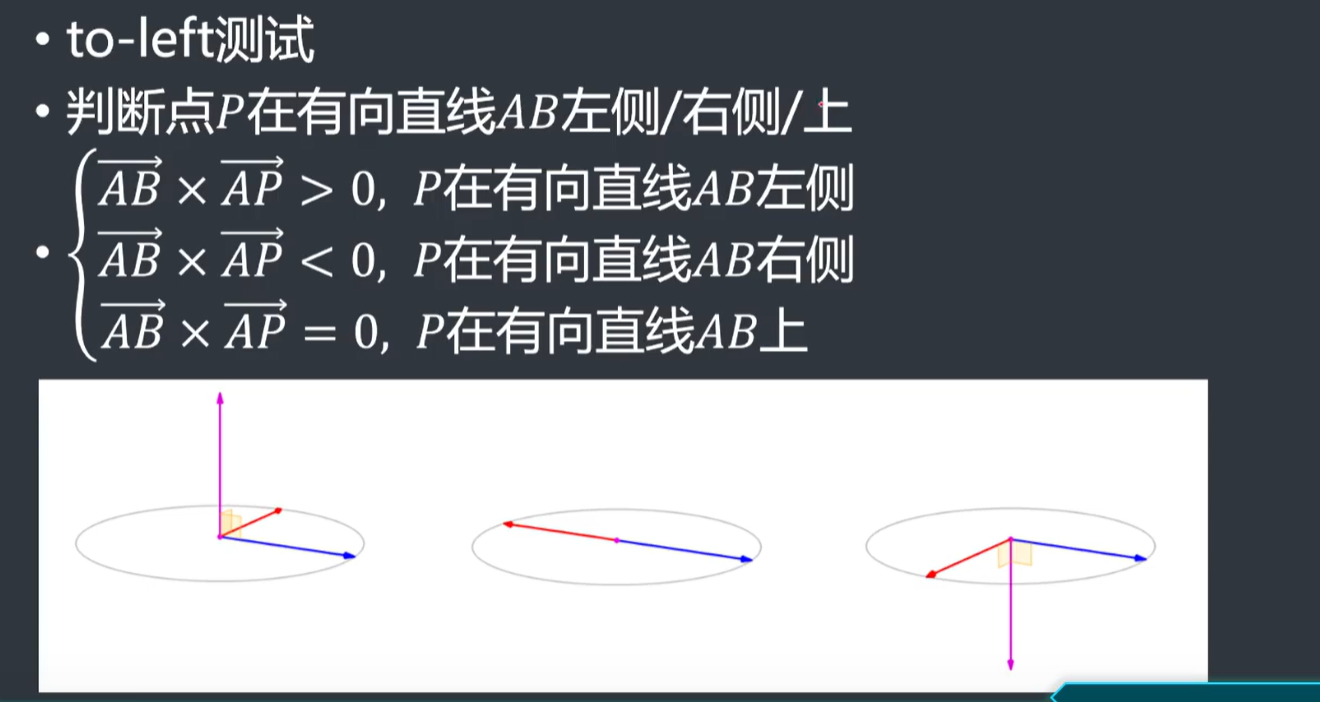
\(to\_left\)测试
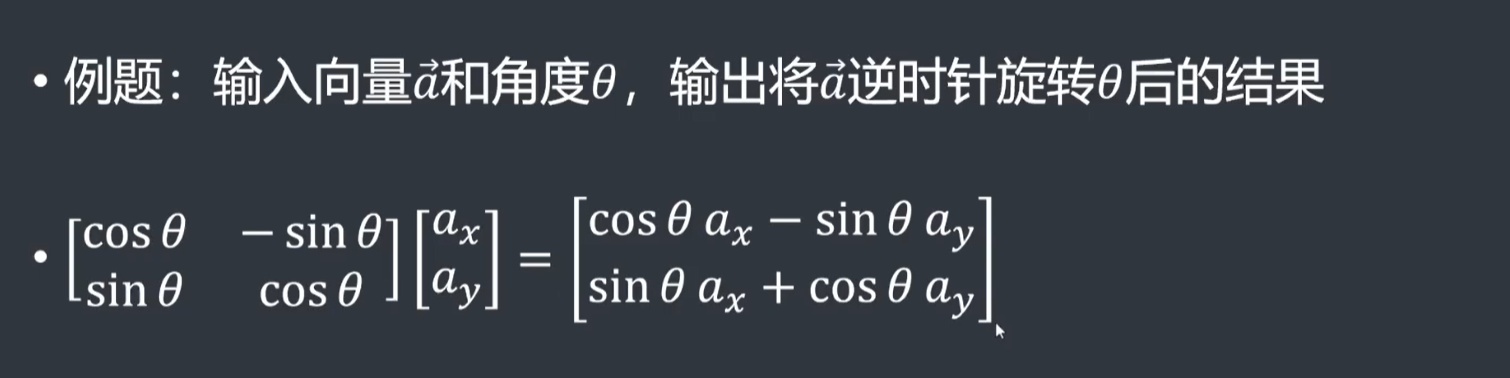
向量旋转
线段
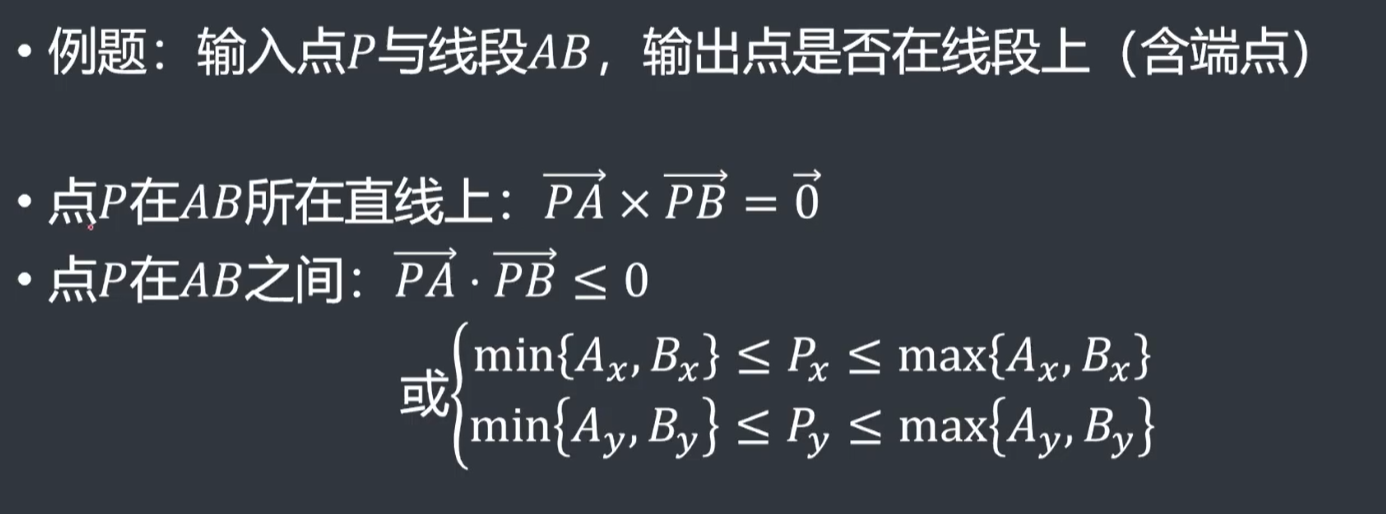
判断点是否在线段上
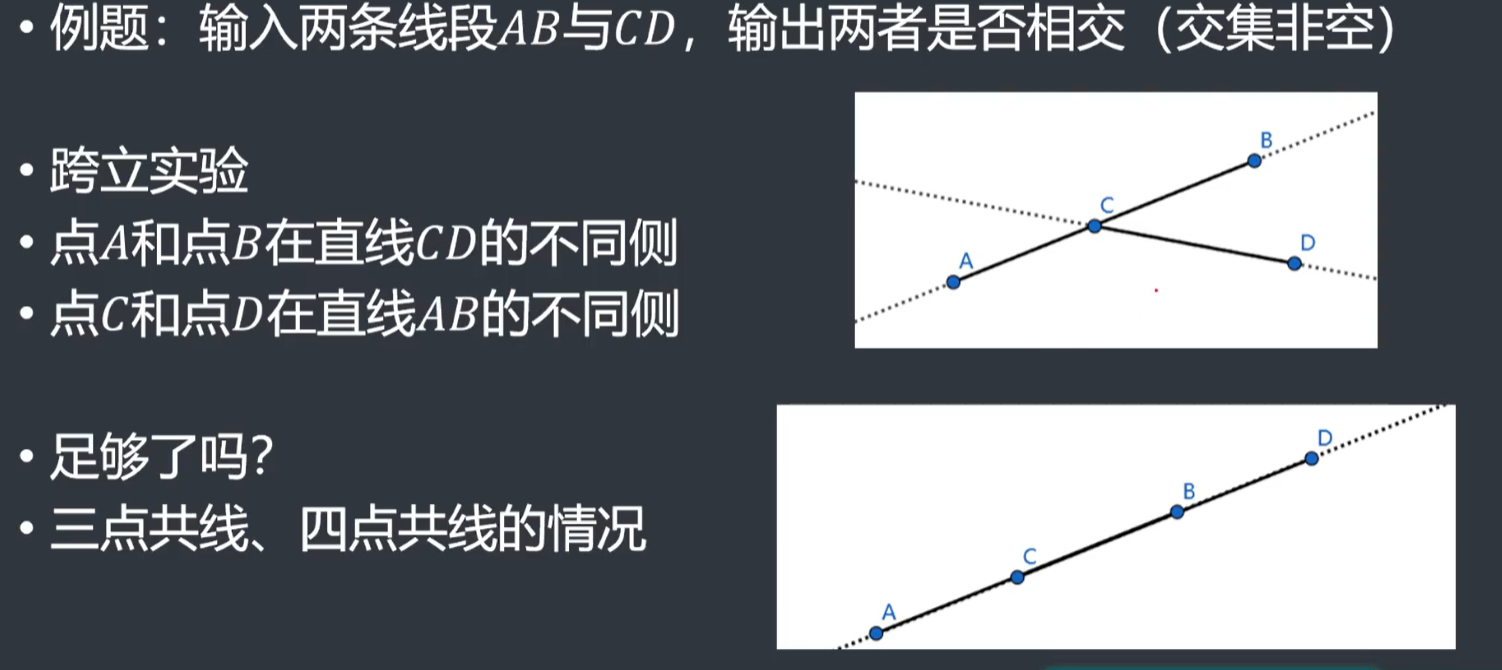
判断两个线段是否相交
直线
- 斜截式:\(y = kx + b\)
- 截距式:\(\frac{x}{a} + \frac{x}{b} = 1\)
- 一般式:\(Ax + By + C = 0\)
- 点斜式:\(y - y_1 = k(x - x_1)\)
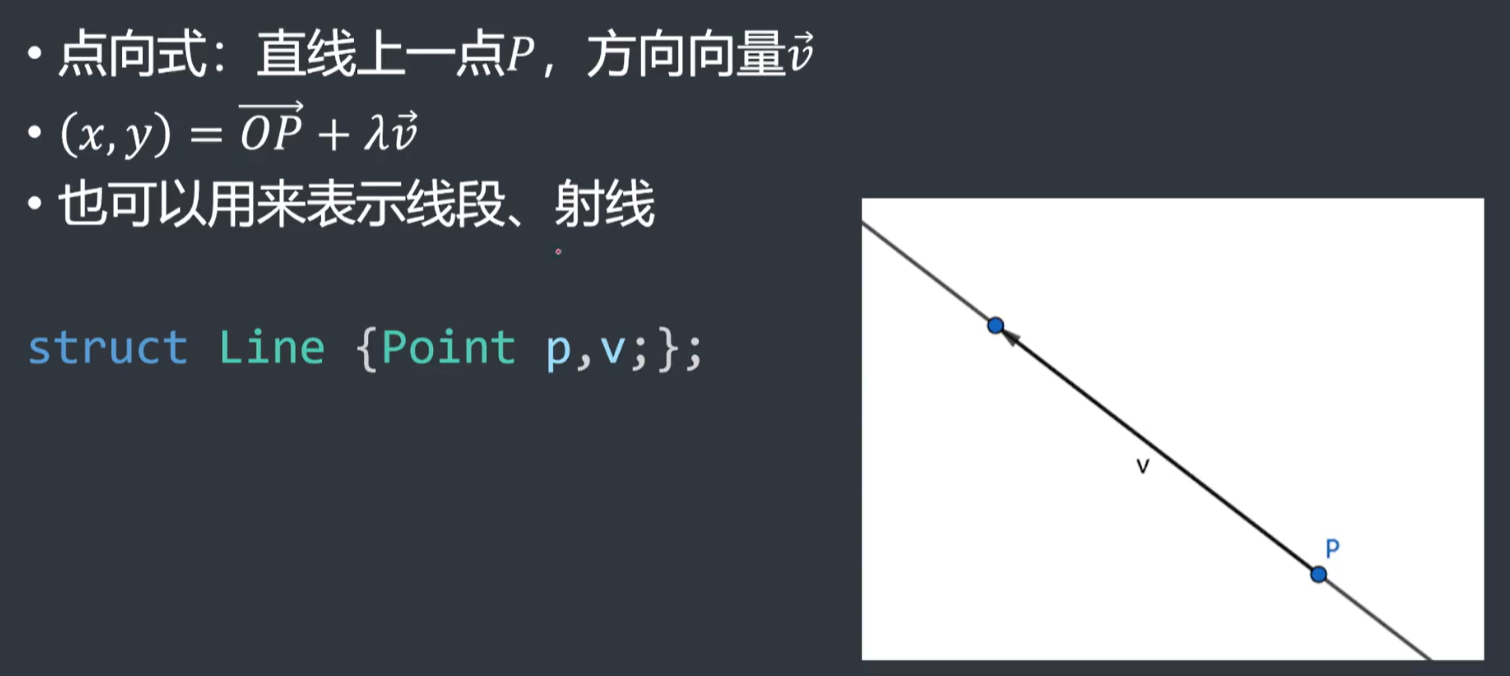
但是上面的我们不推荐使用,我们考虑使用点向式
- 点向式:直线上一点\(P\),以及方向向量\(\vec{v}\)
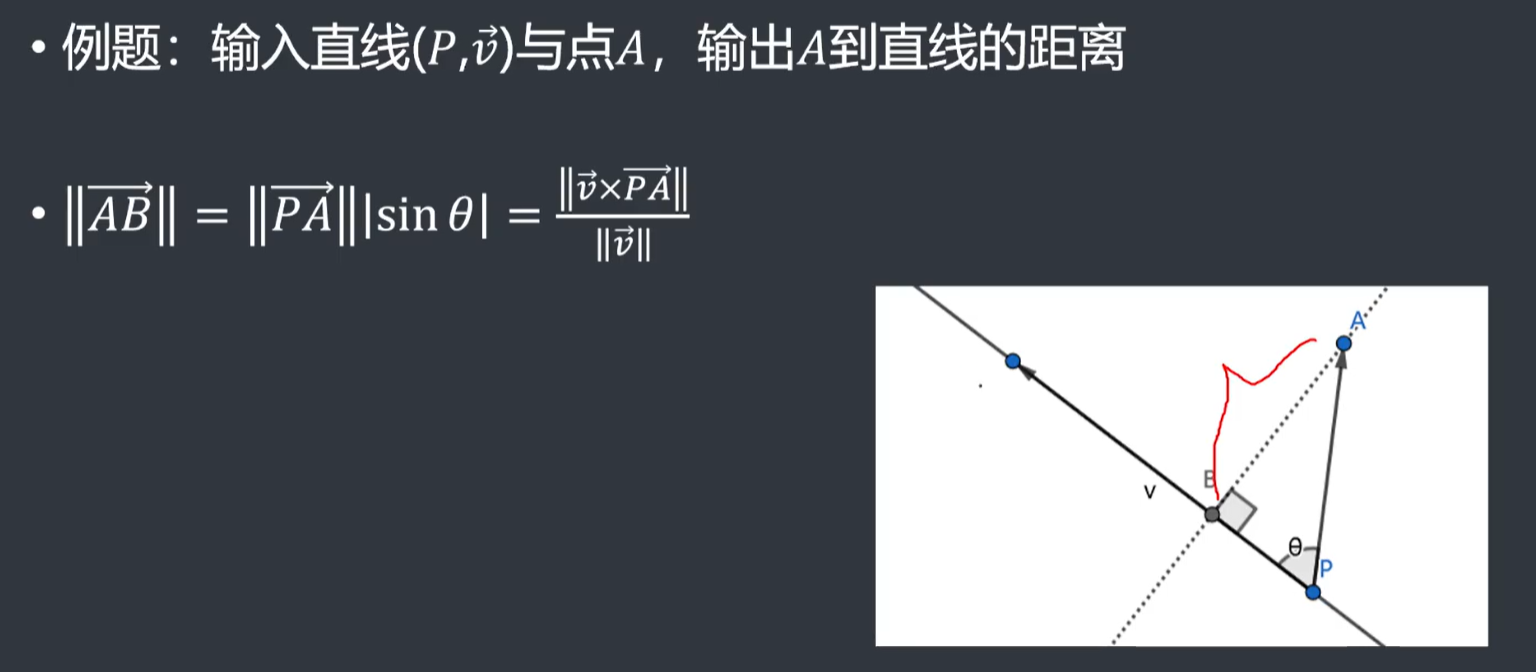
点到直线的距离
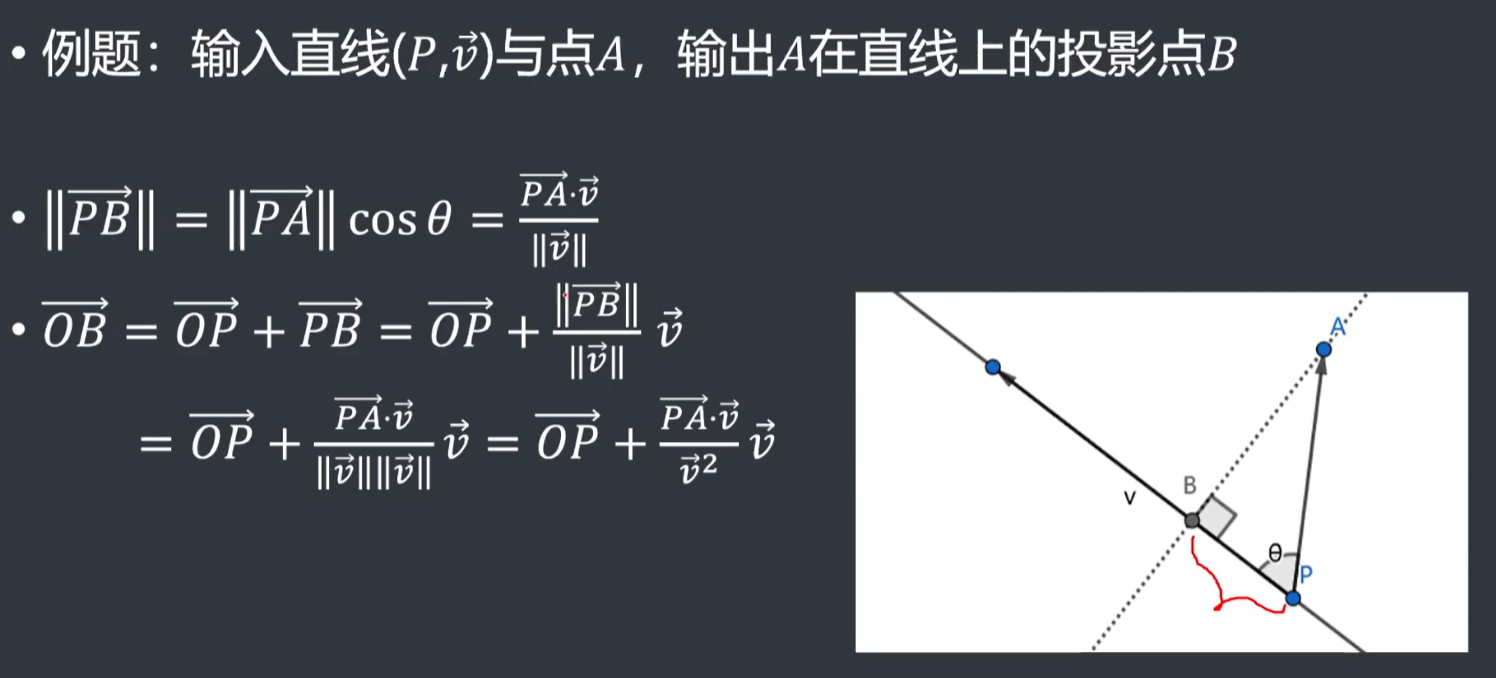
点在直线上的投影
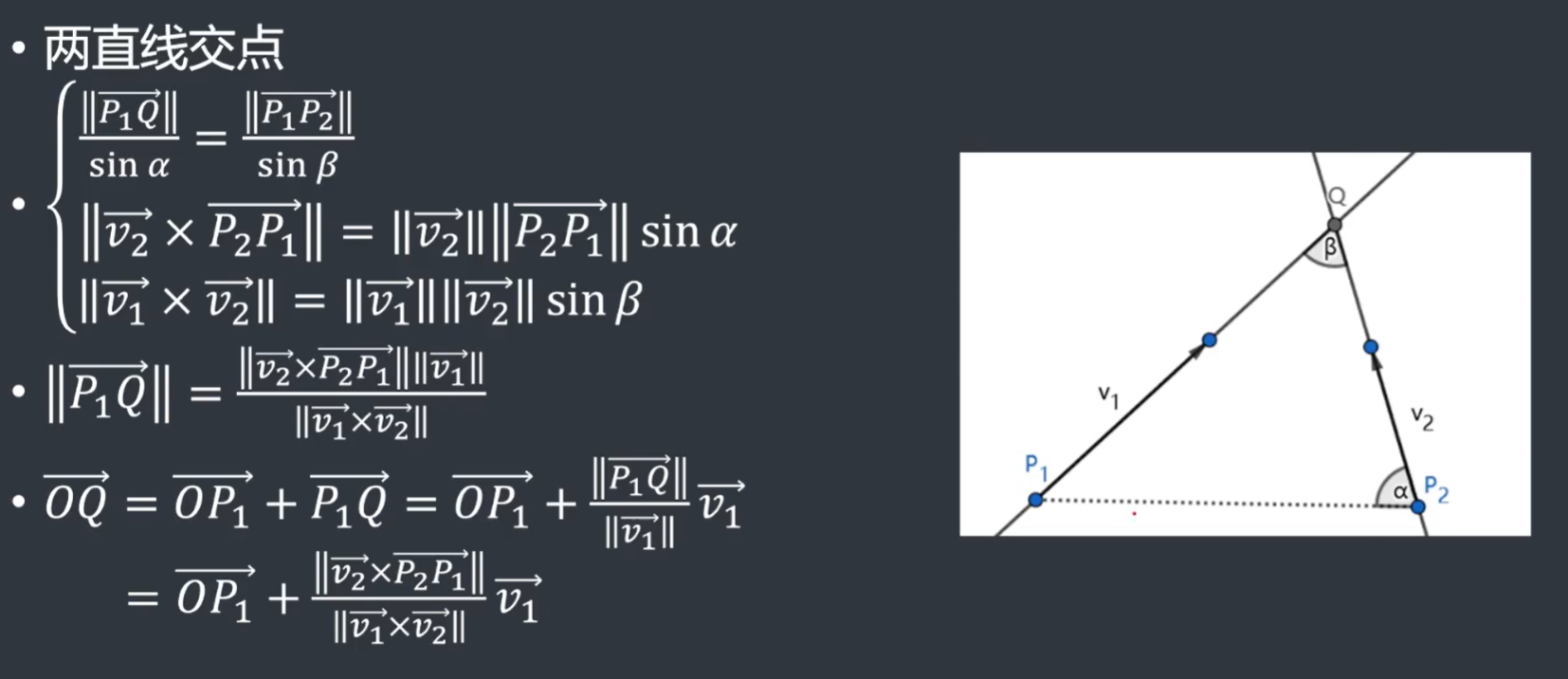
两直线的交点
- 运用了正弦定理和叉积来求交点
- 然后我们可以通过点向式求出交点的坐标
多边形
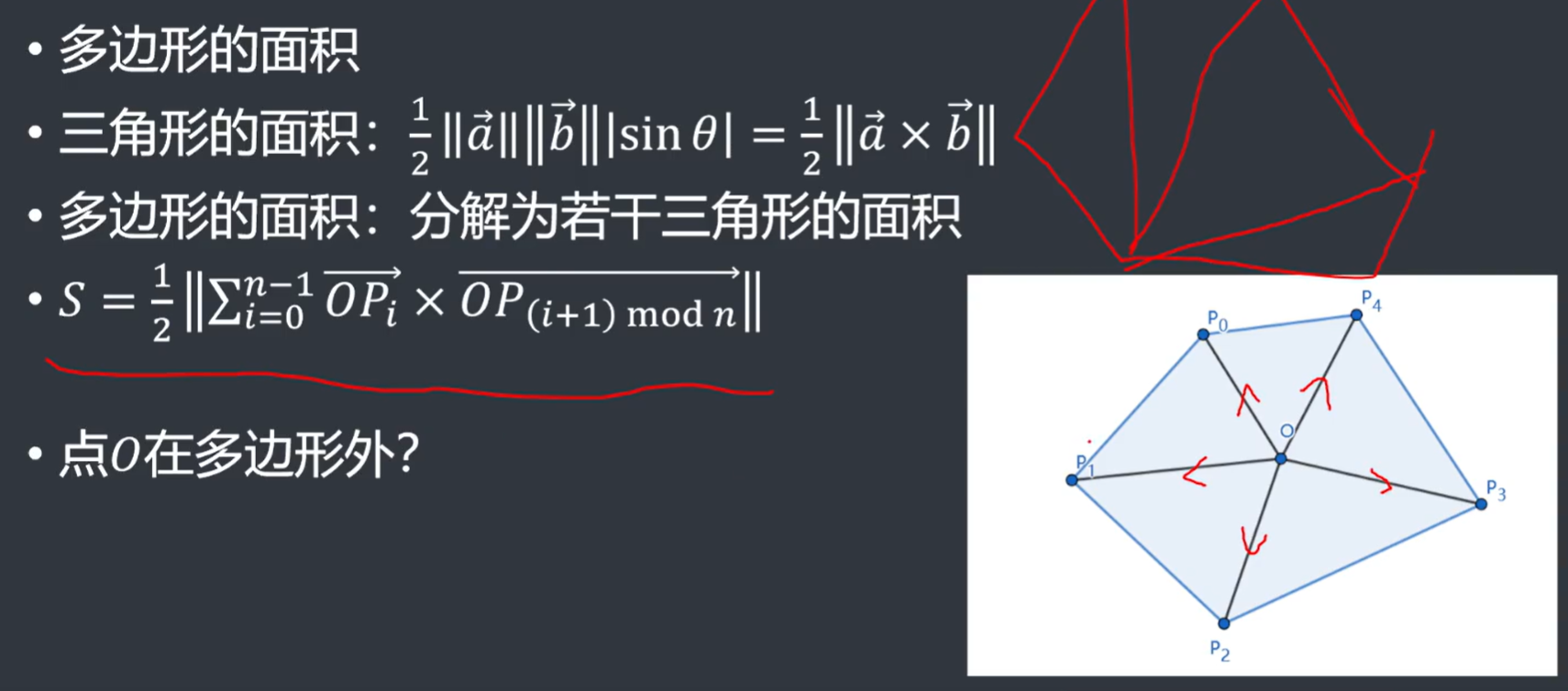
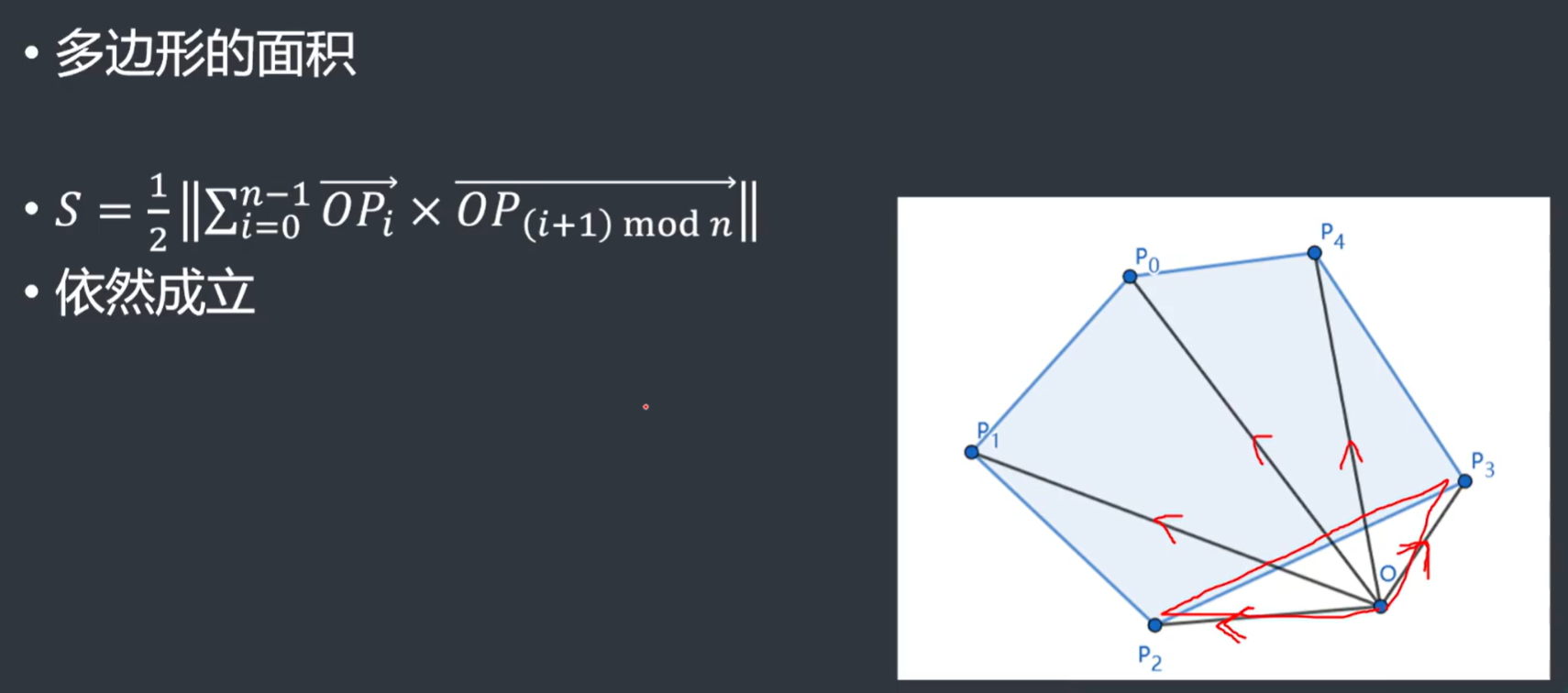
多边形的面积
- 原点\(O\)在多边形外结论同样成立的原因在于:
- 我们发现我们需要容斥删掉一个三角形的面积
- 但是叉积是有正负的
- 我们惊喜的发现需要删掉的三角形的叉积恰好是负数,而其余三角形都为正数
- 注意:计算面积时应该所有叉积累加之后再取模
- 对于非凸多边形来说结论也同样成立
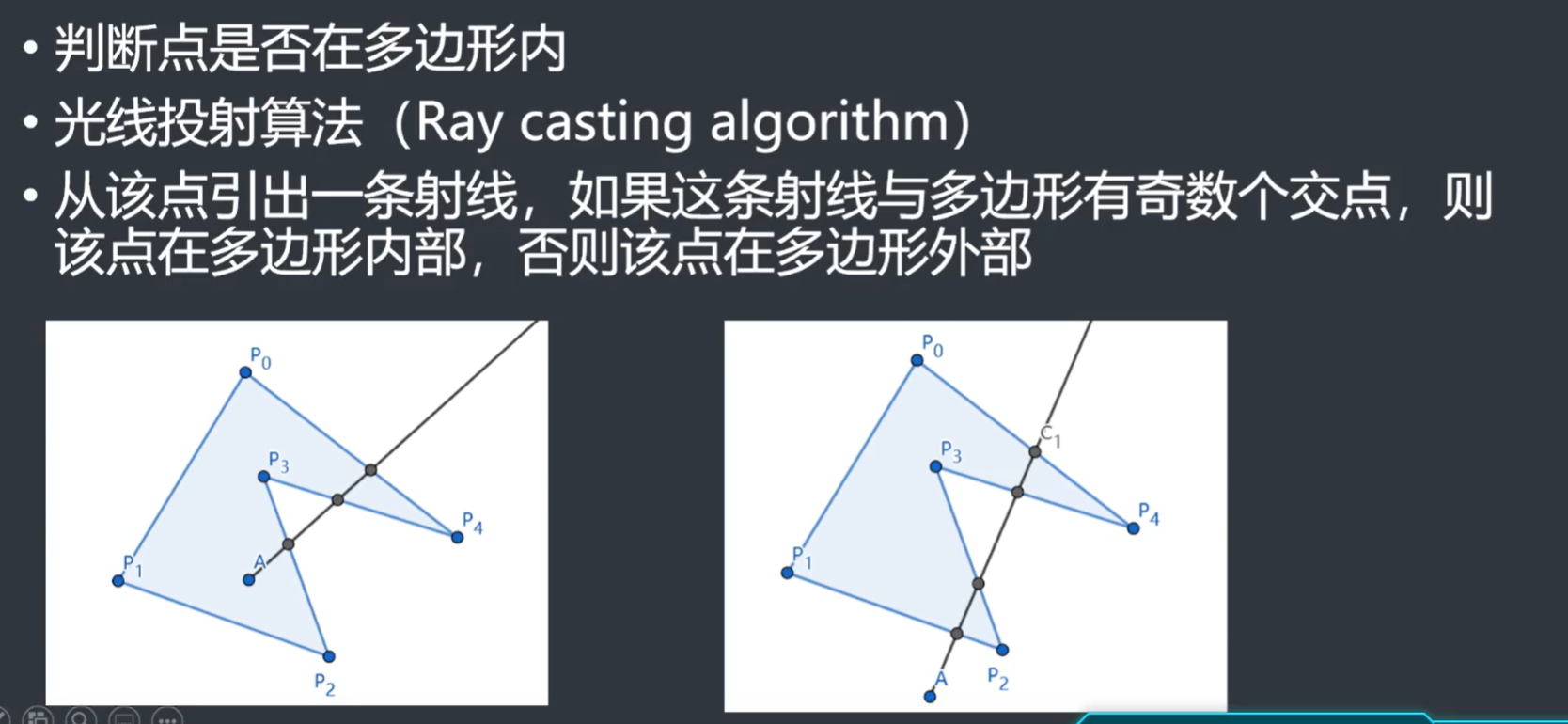
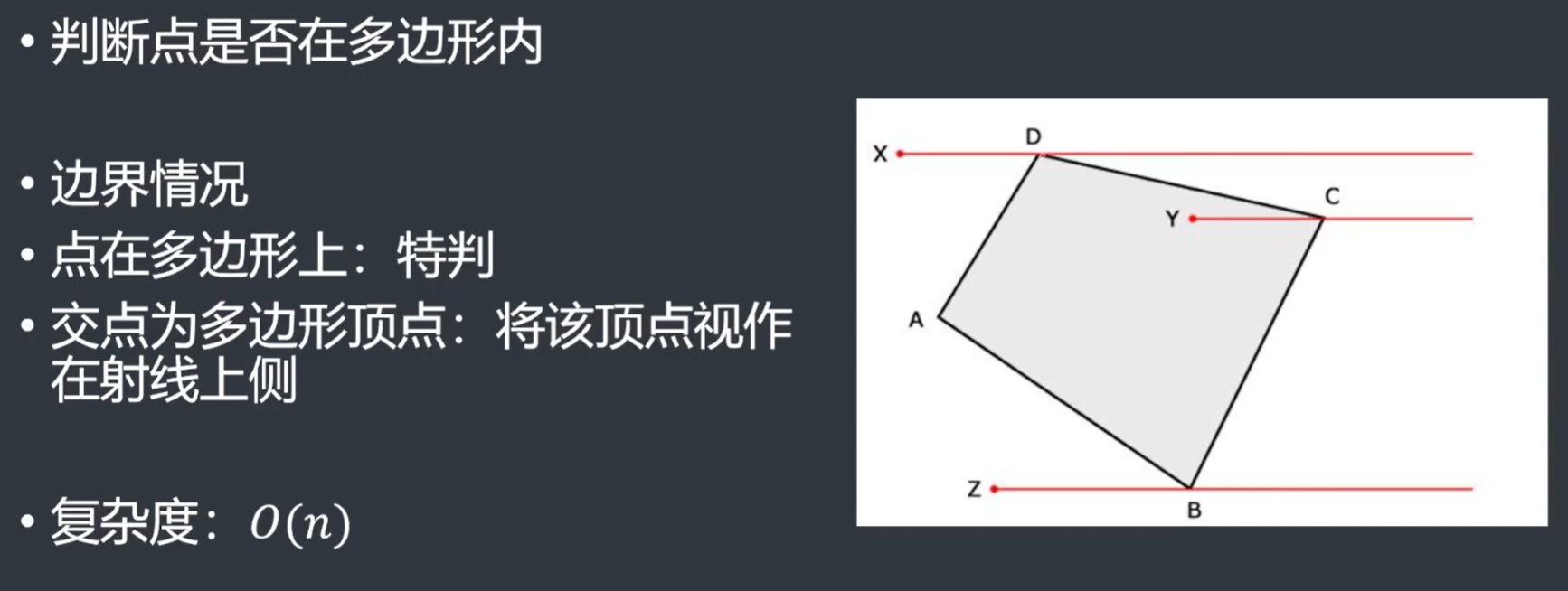
判断点是否在多边形内部
- 光线投射法
- 但是存在退化现象,即存在很多边界条件,需要特判
- 并且射线的方向是自己定的,并不方便
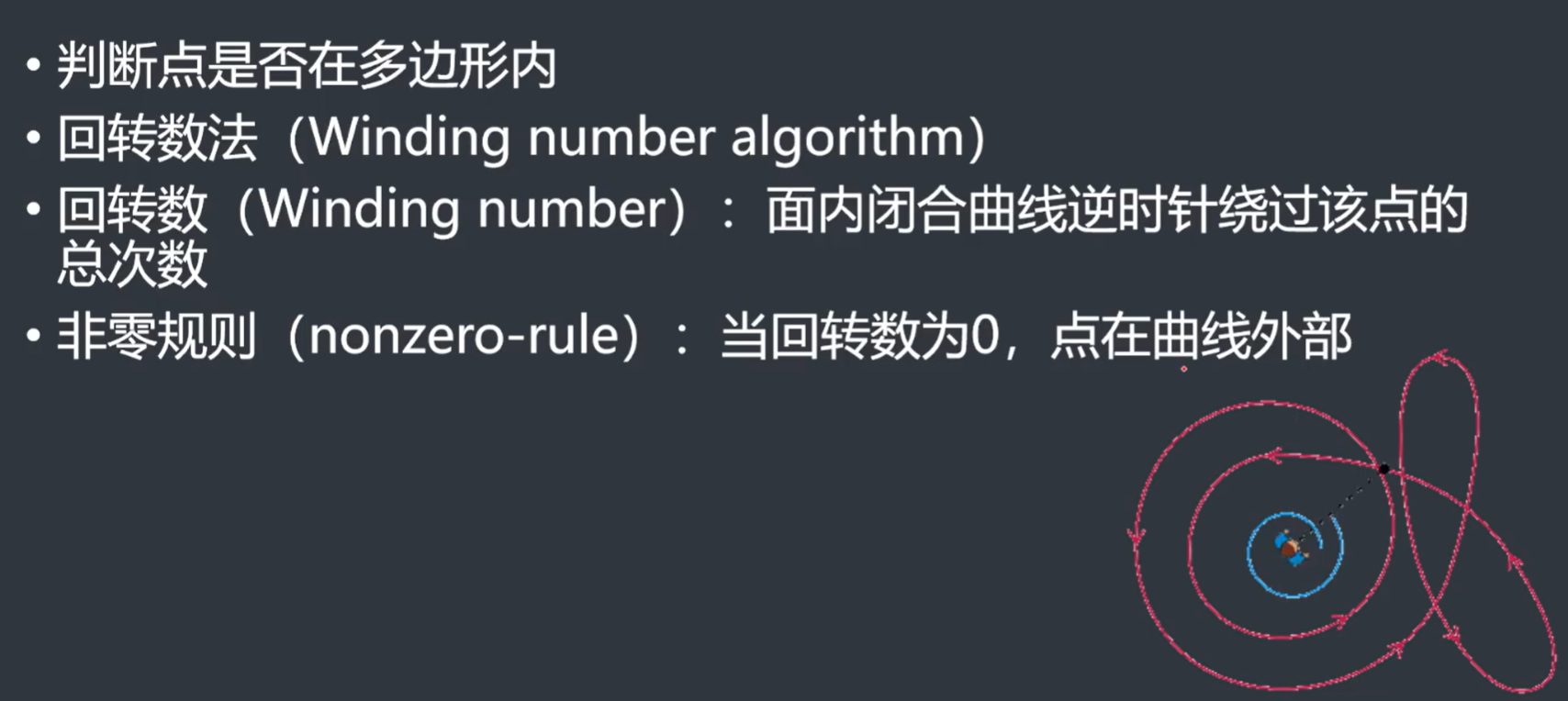
- 回转数法
- 我们算出所有角度之和,如果顺时针就加上该角度,如果逆时针就减去该角度
- 如果最后角度之和为\(0\),代表点在多边形外,否则在多边形内
- 但是该方法需要用到反三角函数求角度,存在效率和精度的问题
- 那有没有更加精确且快速的方法呢?
- 我们可以将光线投射法推广到回转数法中

- 光线投射法在回转数法上的推广
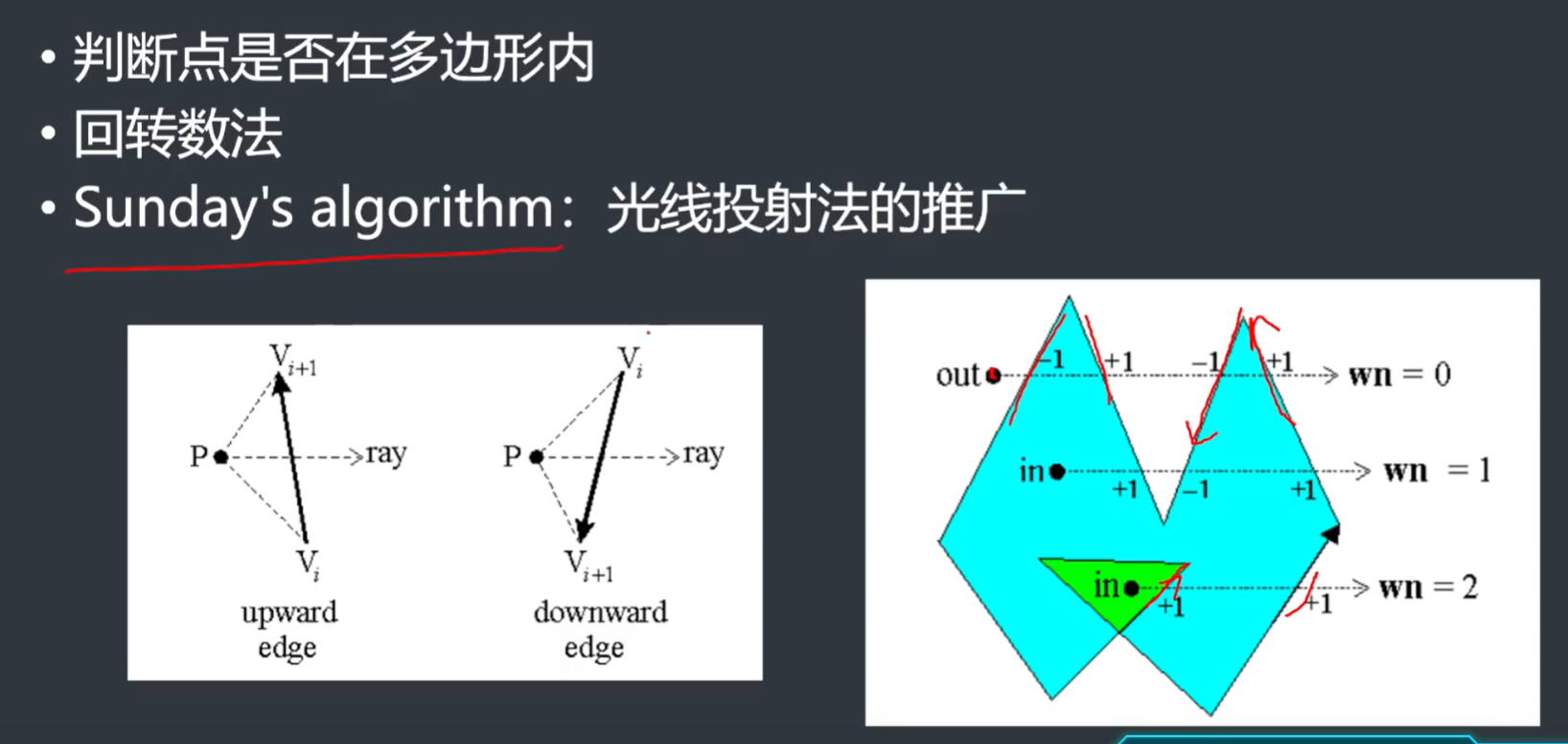
- 但是还存在一些边界情况我们需要特判,或者说需要特殊处理
- 重点是如果交点为多边形顶点,我们需要将该顶点视作在射线上侧
- 我们分析复杂度:
- 因为要遍历每一条边
- 所以复杂度为\(O(n)\)
- 对于一个凸多边形来说,我们存在其他的方法来判断一个点是否在凸多边形内部
- 我们可以考虑\(n\)次\(to\_left\)测试
模板
const double eps = 1e-9;
using point_type = long double;
// 点与向量
template <typename T>
struct point
{
T x, y;
bool operator==(const point &a) const
{
return (fabs(x - a.x) <= eps && fabs(y - a.y) <= eps);
}
bool operator<(const point &a) const
{
if (fabs(x - a.x) <= eps)
return y < a.y - eps;
return x < a.x - eps;
}
bool operator>(const point &a) const
{
return !(*this < a || *this == a);
}
point operator+(const point &a) const
{
return {x + a.x, y + a.y};
}
point operator-(const point &a) const
{
return {x - a.x, y - a.y};
}
point operator-() const
{
return {-x, -y};
}
point operator*(const T k) const
{
return {k * x, k * y};
}
point operator/(const T k) const
{
return {x / k, y / k};
}
// 点积
T operator*(const point &a) const
{
return x * a.x + y * a.y;
}
// 叉积
T operator^(const point &a) const
{
return x * a.y - y * a.x;
}
// to_left 测试
int to_left(const point &a) const
{
auto t = (*this) ^ a;
return (t > eps) - (t < -eps);
}
// 模长的平方
T quad_len() const
{
return (*this) * (*this);
}
// 两点距离的平方
T quad_dis(const point &a) const
{
return (a - (*this)).quad_len();
}
// 向量模长
long double len() const
{
return sqrtl(quad_len());
}
// 两点距离
long double dis(const point &a) const
{
return sqrtl(quad_dis(a));
}
// 向量旋转
point rotate(const long double rad) const
{
return {x * cos(rad) - y * sin(rad), x * sin(rad) + y * cos(rad)};
}
};
using Point = point<point_type>;
// 直线
template <typename T>
struct line
{
// p 为直线上的一点, v 是方向向量
point<T> p, v;
bool operator==(const line &a) const
{
return v.to_left(a.v) == 0 && v.to_left(a.p) == 0;
}
int to_left(const point<T> &a) const
{
return v.to_left(a - p);
}
// 直线交点
point<T> inter(const line &a) const
{
return p + v * ((a.v ^ (p - a.p)) / (v ^ a.v));
}
// 点到直线的距离
long double dis(const point<T> &a) const
{
return abs(v ^ (a - p)) / v.len();
}
// 点在直线上的投影
point<T> project(const point<T> &a) const
{
return p + v * ((a - p) * v / (v * v));
}
};
using Line = line<point_type>;
// 线段
template <typename T>
struct segment
{
point<T> a, b;
// 判断点是否在线段上
// -1 代表点在线段端点处, 0 代表点不在线段上, 1 代表点严格在线段上
int is_on(const point<T> &p) const
{
// 点在端点处
if (p == a || p == b)
return -1;
return (p - a).to_left(p - b) == 0 && (p - a) * (p - b) < -eps;
}
// 判断线段和直线是否相交
// -1 直线经过线段端点, 0 线段和直线不相交, 1 线段和直线严格相交
int is_inter(const line<T> &l) const
{
if (l.toleft(a) == 0 || l.toleft(b) == 0)
return -1;
return l.toleft(a) != l.toleft(b);
}
// 判断两线段是否相交
// -1 在某一线段端点处相交, 0 两线段不相交, 1 两线段严格相交
int is_inter(const segment<T> &s) const
{
if (is_on(s.a) || is_on(s.b) || s.is_on(a) || s.is_on(b))
return -1;
// 跨立实验
const line<T> l{a, b - a}, ls{s.a, s.b - s.a};
return l.toleft(s.a) * l.toleft(s.b) == -1 && ls.toleft(a) * ls.toleft(b) == -1;
}
};
using Segment = segment<point_type>;
// 多边形
template <typename T>
struct polygon
{
vector<point<T>> p; // 以逆时针顺序存储
size_t nxt(const size_t i) const { return i == p.size() - 1 ? 0 : i + 1; }
size_t pre(const size_t i) const { return i == 0 ? p.size() - 1 : i - 1; }
// 回转数
// 返回值第一项表示点是否在多边形边上
// 对于狭义多边形,回转数为 0 表示点在多边形外,否则点在多边形内
pair<bool, int> winding(const point<T> &a) const
{
int cnt = 0;
for (size_t i = 0; i < p.size(); i++)
{
const point<T> u = p[i], v = p[nxt(i)];
// 点在多边形上
if (abs((a - u) ^ (a - v)) <= eps && (a - u) * (a - v) <= eps)
return {true, 0};
if (abs(u.y - v.y) <= eps)
continue;
const line<T> uv = {u, v - u};
// 保证 u 和 v 所连成的线段能被从点a 射出的射线击中
if (u.y < v.y - eps && uv.to_left(a) <= 0)
continue;
if (u.y > v.y + eps && uv.to_left(a) >= 0)
continue;
if (u.y < a.y - eps && v.y >= a.y - eps)
cnt++;
if (u.y >= a.y - eps && v.y < a.y - eps)
cnt--;
}
return {false, cnt};
}
// 多边形面积的两倍
// 可用于判断点的存储顺序是顺时针或逆时针
T area() const
{
T sum = 0;
for (size_t i = 0; i < p.size(); i++)
sum += p[i] ^ p[nxt(i)];
return sum;
}
// 多边形的周长
long double circle() const
{
long double sum = 0;
for (size_t i = 0; i < p.size(); i++)
sum += p[i].dis(p[nxt(i)]);
return sum;
}
};
using Polygon = polygon<point_type>;
例题
计算几何spj hacker
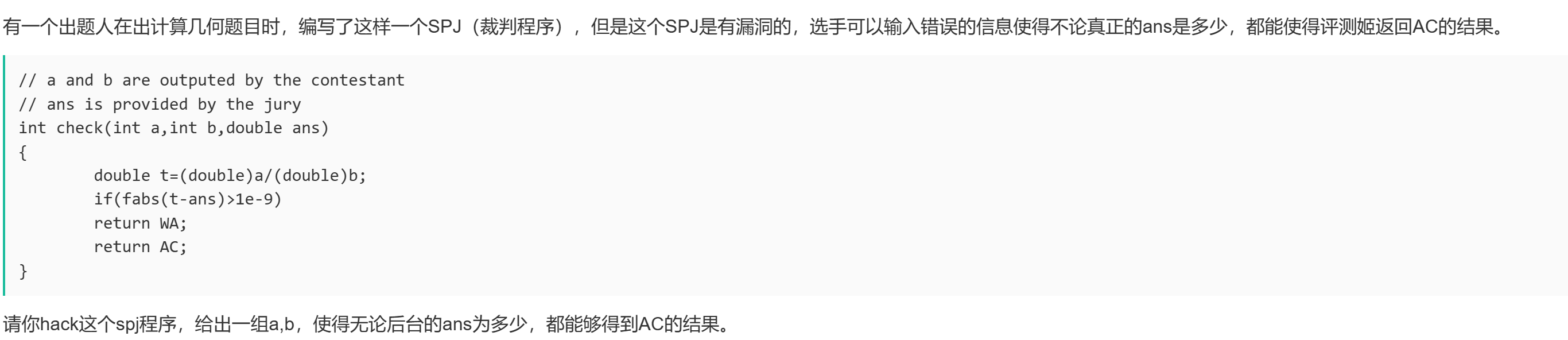
题解
- 考察\(NAN\)的性质
- 显然我们构造出\(a / b=NAN\)即可,因为\(NAN > x,x为任何数=false\)
- 直接构造\(a = 0,b = 0\)即可
void solve()
{
cout << 0 << " " << 0 << endl;
}
Winding Number
\(3 \leq n \leq 5000,1 \leq m \leq 5000\)

题解
- 如果把给你的点看作是多边形的顶点
- 那么每次询问就可以转化为:询问一个点是否在多边形内部
- 运用光线投射法在回转数法上的拓展即可
- 复杂度:\(O(nm)\)
const int N = 2e5 + 10, M = 4e5 + 10;
const double eps = 1e-9;
// 点与向量
template <typename T>
struct Point
{
T x, y;
bool operator==(const Point &a) const
{
return (fabs(x - a.x) <= eps && fabs(y - a.y) <= eps);
}
bool operator<(const Point &a) const
{
if (fabs(x - a.x) <= eps)
return y < a.y - eps;
return x < a.x - eps;
}
bool operator>(const Point &a) const
{
return !(*this < a || *this == a);
}
Point operator+(const Point &a) const
{
return {x + a.x, y + a.y};
}
Point operator-(const Point &a) const
{
return {x - a.x, y - a.y};
}
Point operator-() const
{
return {-x, -y};
}
Point operator*(const T k) const
{
return {k * x, k * y};
}
Point operator/(const T k) const
{
return {x / k, y / k};
}
// 点积
T operator*(const Point &a) const
{
return x * a.x + y * a.y;
}
// 叉积
T operator^(const Point &a) const
{
return x * a.y - y * a.x;
}
// to_left 测试
int to_left(const Point &a) const
{
auto t = (*this) ^ a;
return (t > eps) - (t < -eps);
}
// 模长的平方
T quad_len() const
{
return (*this) * (*this);
}
// 两点距离的平方
T quad_dis(const Point &a) const
{
return (a - (*this)).quad_len();
}
// 向量模长
long double len() const
{
return sqrtl(quad_len());
}
// 两点距离
long double dis(const Point &a) const
{
return sqrtl(quad_dis(a));
}
// 向量旋转
Point rot(const long double rad) const
{
return {x * cos(rad) - y * sin(rad), x * sin(rad) + y * cos(rad)};
}
};
// 直线
template <typename T>
struct Line
{
// p 为直线上的一点, v 是方向向量
Point<T> p, v;
bool operator==(const Line &a) const
{
return v.to_left(a.v) == 0 && v.to_left(a.p) == 0;
}
int to_left(const Point<T> &a) const
{
return v.to_left(a - p);
}
// 直线交点
Point<T> inter(const Line &a) const
{
return p + ((a.v ^ (p - a.p)) / (v ^ a.v)) * v;
}
// 点到直线的距离
long double dis(const Point<T> &a) const
{
return abs(v ^ (a - p)) / v.len();
}
// 点在直线上的投影
Point<T> project(const Point<T> &a) const
{
return p + ((a - p) * v / (v * v)) * v;
}
};
// 线段
template <typename T>
struct Segment
{
Point<T> a, b;
// 判断点是否在线段上
// -1 代表点在线段端点处, 0 代表点不在线段上, 1 代表点严格在线段上
int is_on(const Point<T> &p) const
{
// 点在端点处
if (p == a || p == b)
return -1;
return (p - a).to_left(p - b) == 0 && (p - a) * (p - b) < -eps;
}
// 判断线段和直线是否相交
// -1 直线经过线段端点, 0 线段和直线不相交, 1 线段和直线严格相交
int is_inter(const Line<T> &line) const
{
if (line.toleft(a) == 0 || line.toleft(b) == 0)
return -1;
return line.toleft(a) != line.toleft(b);
}
// 判断两线段是否相交
// -1 在某一线段端点处相交, 0 两线段不相交, 1 两线段严格相交
int is_inter(const Segment<T> &s) const
{
if (is_on(s.a) || is_on(s.b) || s.is_on(a) || s.is_on(b))
return -1;
// 跨立实验
const Line<T> l{a, b - a}, ls{s.a, s.b - s.a};
return l.toleft(s.a) * l.toleft(s.b) == -1 && ls.toleft(a) * ls.toleft(b) == -1;
}
};
// 多边形
template <typename T>
struct Polygon
{
vector<Point<T>> p; // 以逆时针顺序存储
size_t nxt(const size_t i) const { return i == p.size() - 1 ? 0 : i + 1; }
size_t pre(const size_t i) const { return i == 0 ? p.size() - 1 : i - 1; }
// 回转数
// 返回值第一项表示点是否在多边形边上
// 对于狭义多边形,回转数为 0 表示点在多边形外,否则点在多边形内
pair<bool, int> winding(const Point<T> &a) const
{
int cnt = 0;
for (size_t i = 0; i < p.size(); i++)
{
const Point<T> u = p[i], v = p[nxt(i)];
// 点在多边形上
if (abs((a - u) ^ (a - v)) <= eps && (a - u) * (a - v) <= eps)
return {true, 0};
if (abs(u.y - v.y) <= eps)
continue;
const Line<T> uv = {u, v - u};
// 保证 u 和 v 所连成的线段能被从点a 射出的射线击中
if (u.y < v.y - eps && uv.to_left(a) <= 0)
continue;
if (u.y > v.y + eps && uv.to_left(a) >= 0)
continue;
if (u.y < a.y - eps && v.y >= a.y - eps)
cnt++;
if (u.y >= a.y - eps && v.y < a.y - eps)
cnt--;
}
return {false, cnt};
}
// 多边形面积的两倍
// 可用于判断点的存储顺序是顺时针或逆时针
T area() const
{
T sum = 0;
for (size_t i = 0; i < p.size(); i++)
sum += p[i] ^ p[nxt(i)];
return sum;
}
// 多边形的周长
long double circle() const
{
long double sum = 0;
for (size_t i = 0; i < p.size(); i++)
sum += p[i].dis(p[nxt(i)]);
return sum;
}
};
int n, q;
vector<Point<int>> vec;
void solve()
{
cin >> n;
for (int i = 1; i <= n; ++i)
{
int x, y;
cin >> x >> y;
vec.push_back({x, y});
}
Polygon<int> poly;
poly.p = vec;
cin >> q;
while (q--)
{
int x, y;
cin >> x >> y;
auto [flag, cnt] = poly.winding({x, y});
if (flag)
cout << "EDGE" << endl;
else
cout << cnt << endl;
}
}
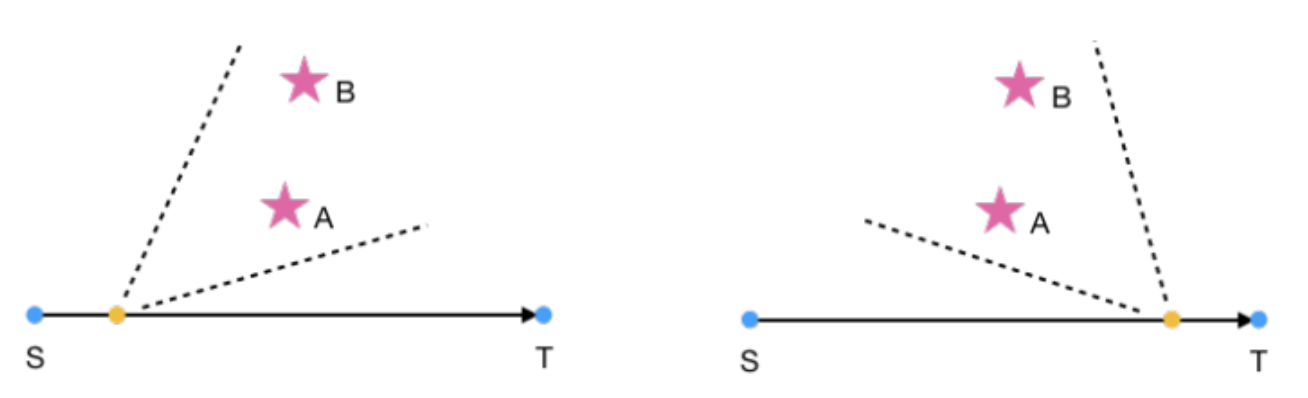
Mr. Main and Windmills
梅因先生乘火车从一个城市到另一个城市,经过一片到处是风车的平原。火车沿直线行驶。风车是用于风力发电的机器。它的风扇叶片在风吹的时候旋转。从他的角度看,五颜六色的风车从左到右排列在地平线上。
随着火车的行驶,从他的视角看,风车的排列顺序也在不断变化。风车原来在另一个的左边/右边,后来移到了右边/左边;根据风车的坐标,请找出他在观察第\(h\)个风车与其他风车交换顺序的第\(k\)次时的坐标。
可以保证,给定的任何三个点,即城市和风车,都不是共线的,而且所有的风车都在火车行驶路线的同一侧。
题解
- 容易发现第\(h\)个风车与其他风车交换顺序的位置一定是线段\(ST\)和直线\(AB\)的交点
- 所以一个朴素的想法就是求出所有交点后排序即可
- 但是由于直接求交点会存在精度误差,所以我们应该先判断直线和线段有无交点,判断方法:两次\(to\_left\)测试
- 然后排序的话需要按照距离起点\(S\)的距离大小进行升序排列
const int N = 1e3 + 10, M = 4e5 + 10;
const double eps = 1e-8;
// 点与向量
template <typename T>
struct Point
{
T x, y;
bool operator==(const Point &a) const
{
return (fabs(x - a.x) <= eps && fabs(y - a.y) <= eps);
}
bool operator<(const Point &a) const
{
if (fabs(x - a.x) <= eps)
return y < a.y - eps;
return x < a.x - eps;
}
bool operator>(const Point &a) const
{
return !(*this < a || *this == a);
}
Point operator+(const Point &a) const
{
return {x + a.x, y + a.y};
}
Point operator-(const Point &a) const
{
return {x - a.x, y - a.y};
}
Point operator-() const
{
return {-x, -y};
}
Point operator*(const T k) const
{
return {k * x, k * y};
}
Point operator/(const T k) const
{
return {x / k, y / k};
}
// 点积
T operator*(const Point &a) const
{
return x * a.x + y * a.y;
}
// 叉积
T operator^(const Point &a) const
{
return x * a.y - y * a.x;
}
// to_left 测试
int to_left(const Point &a) const
{
auto t = (*this) ^ a;
return (t > eps) - (t < -eps);
}
// 模长的平方
T quad_len() const
{
return (*this) * (*this);
}
// 两点距离的平方
T quad_dis(const Point &a) const
{
return (a - (*this)).quad_len();
}
// 向量模长
long double len() const
{
return sqrtl(quad_len());
}
// 两点距离
long double dis(const Point &a) const
{
return sqrtl(quad_dis(a));
}
// 向量旋转
Point rot(const long double rad) const
{
return {x * cos(rad) - y * sin(rad), x * sin(rad) + y * cos(rad)};
}
};
// 直线
template <typename T>
struct Line
{
// p 为直线上的一点, v 是方向向量
Point<T> p, v;
bool operator==(const Line &a) const
{
return v.to_left(a.v) == 0 && v.to_left(a.p) == 0;
}
int to_left(const Point<T> &a) const
{
return v.to_left(a - p);
}
// 直线交点
Point<T> inter(const Line &a) const
{
return p + v * ((a.v ^ (p - a.p)) / (v ^ a.v));
}
// 点到直线的距离
long double dis(const Point<T> &a) const
{
return abs(v ^ (a - p)) / v.len();
}
// 点在直线上的投影
Point<T> project(const Point<T> &a) const
{
return p + v * ((a - p) * v / (v * v));
}
};
#define double long double
int n, q;
Point<double> st, ed;
Point<double> p[N];
void solve()
{
cin >> n >> q;
cin >> st.x >> st.y >> ed.x >> ed.y;
// Segment<double> seg = {st, ed};
for (int i = 1; i <= n; ++i)
cin >> p[i].x >> p[i].y;
while (q--)
{
int h, k;
cin >> h >> k;
vector<Point<double>> vec;
for (int i = 1; i <= n; ++i)
{
if (i == h)
continue;
Line<double> line = {p[h], p[i] - p[h]};
// 先通过to_left测试判断直线和线段有无交点,如果有交点的话求交点
if (line.to_left(st) * line.to_left(ed) <= 0)
{
Point<double> inter = line.inter({st, st - ed});
vec.push_back(inter);
}
}
sort(all(vec), [](Point<double> a, Point<double> b)
{ return st.dis(a) < st.dis(b); });
if (vec.size() < k)
cout << -1 << endl;
else
cout << fixed << setprecision(9) << vec[k - 1].x << " " << vec[k - 1].y << endl;
}
}
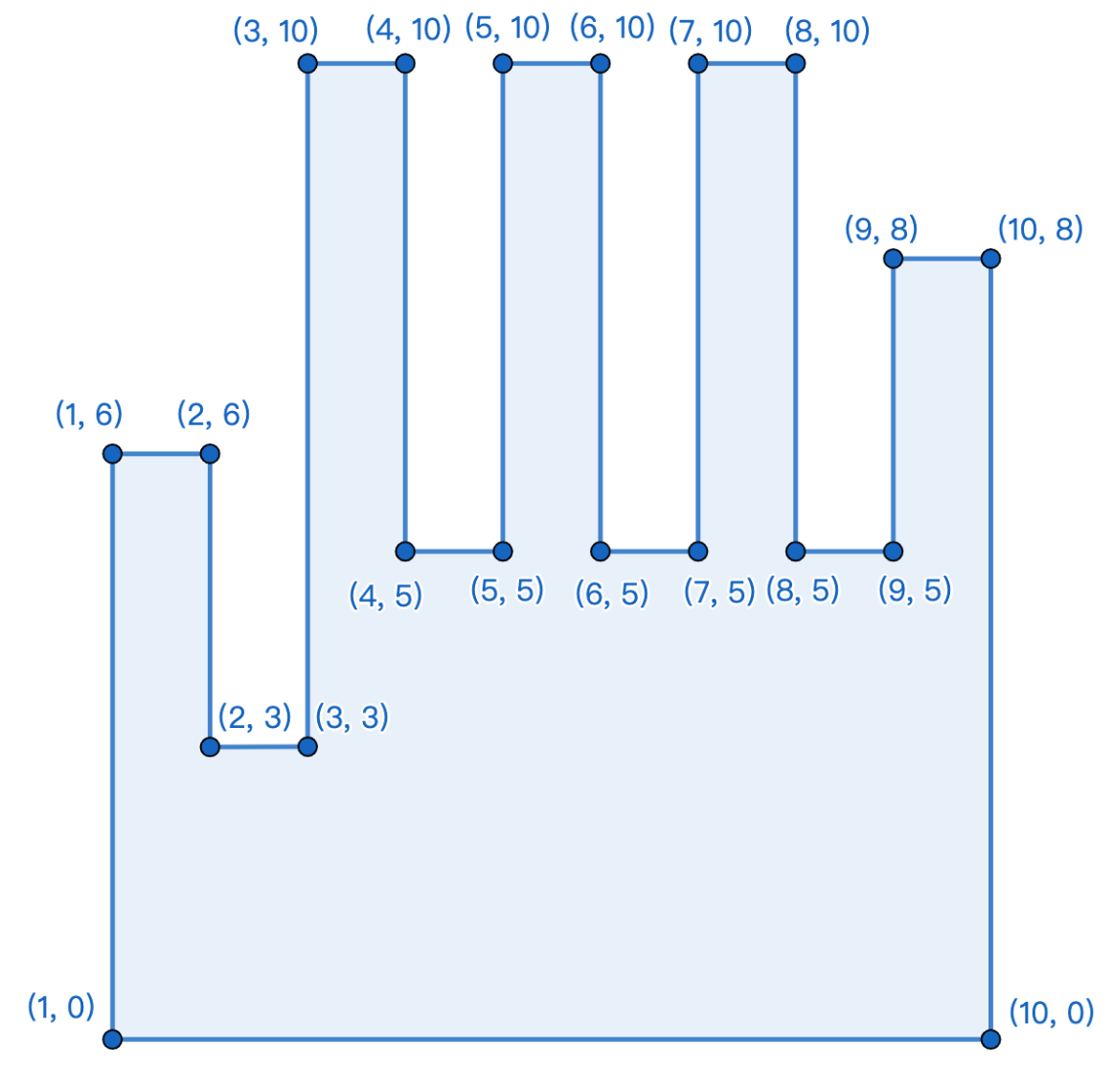
Operation Love
给定一只右手的样子,规定左手与右手对称,逆时针或顺时针给定\(20\)个点组成手,判断这是左手还是右手
题解
- 遍历每条边,找到长度为\(9\)的边
- 利用\(to\_left\)测试判断逆时针或顺时针
- 比较该边的两条邻边大小即可
const int N = 2e5 + 10, M = 4e5 + 10;
int n = 20;
using point_type = long double;
// 点与向量
template <typename T>
struct point
{
T x, y;
bool operator==(const point &a) const
{
return (fabs(x - a.x) <= eps && fabs(y - a.y) <= eps);
}
bool operator<(const point &a) const
{
if (fabs(x - a.x) <= eps)
return y < a.y - eps;
return x < a.x - eps;
}
bool operator>(const point &a) const
{
return !(*this < a || *this == a);
}
point operator+(const point &a) const
{
return {x + a.x, y + a.y};
}
point operator-(const point &a) const
{
return {x - a.x, y - a.y};
}
point operator-() const
{
return {-x, -y};
}
point operator*(const T k) const
{
return {k * x, k * y};
}
point operator/(const T k) const
{
return {x / k, y / k};
}
// 点积
T operator*(const point &a) const
{
return x * a.x + y * a.y;
}
// 叉积
T operator^(const point &a) const
{
return x * a.y - y * a.x;
}
// to_left 测试
int to_left(const point &a) const
{
auto t = (*this) ^ a;
return (t > eps) - (t < -eps);
}
// 模长的平方
T quad_len() const
{
return (*this) * (*this);
}
// 两点距离的平方
T quad_dis(const point &a) const
{
return (a - (*this)).quad_len();
}
// 向量模长
long double len() const
{
return sqrtl(quad_len());
}
// 两点距离
long double dis(const point &a) const
{
return sqrtl(quad_dis(a));
}
// 向量旋转
point rot(const long double rad) const
{
return {x * cos(rad) - y * sin(rad), x * sin(rad) + y * cos(rad)};
}
};
using Point = point<point_type>;
// 直线
template <typename T>
struct line
{
// p 为直线上的一点, v 是方向向量
point<T> p, v;
bool operator==(const line &a) const
{
return v.to_left(a.v) == 0 && v.to_left(a.p) == 0;
}
int to_left(const point<T> &a) const
{
return v.to_left(a - p);
}
// 直线交点
point<T> inter(const line &a) const
{
return p + v * ((a.v ^ (p - a.p)) / (v ^ a.v));
}
// 点到直线的距离
long double dis(const point<T> &a) const
{
return abs(v ^ (a - p)) / v.len();
}
// 点在直线上的投影
point<T> project(const point<T> &a) const
{
return p + v * ((a - p) * v / (v * v));
}
};
using Line = line<point_type>;
Point p[25];
void solve()
{
for (int i = 1; i <= n; ++i)
cin >> p[i].x >> p[i].y;
for (int i = 1; i <= n; ++i)
{
int nxt = i + 1;
if (nxt == n + 1)
nxt = 1;
if (p[i].dis(p[nxt]) >= 9 - eps && p[i].dis(p[nxt]) <= 9 + eps)
{
int cnt0 = 0, cnt1 = 0;
for (int j = 1; j <= n; ++j)
{
if (i == j || nxt == j)
continue;
int tmp = (p[nxt] - p[i]).to_left(p[j] - p[i]);
if (tmp < 0)
cnt0++;
else if (tmp > 0)
cnt1++;
}
if (cnt0 == 18) // 顺时针给出
{
int j = nxt + 1;
if (j == n + 1)
j = 1;
int pre = i - 1;
if (pre == 0)
pre = n;
if (p[pre].quad_dis(p[i]) > p[nxt].quad_dis(p[j]))
cout << "right" << endl;
else
cout << "left" << endl;
return;
}
else if (cnt1 == 18) // 逆时针给出
{
int j = nxt + 1;
if (j == n + 1)
j = 1;
int pre = i - 1;
if (pre == 0)
pre = n;
if (p[pre].quad_dis(p[i]) > p[nxt].quad_dis(p[j]))
cout << "left" << endl;
else
cout << "right" << endl;
return;
}
}
}
}
Magic Rabbit
给定\(3\)瓶溶液,每瓶溶液中物质\(A、B\)的比例分别为\((a_1,b_1),(a_2,b_2),(a_3,b_3)\)
\(q\)次询问,每次询问给定物质\(A、B\)的比例\((x,y)\),询问是否能用上述三瓶溶液配制出\((x,y)\)的溶液
题解
\[\frac{\lambda_1a_1 + \lambda_2a_2}{\lambda_1+\lambda_2} = \lambda a_1 + (1 - \lambda)a_2\\ \frac{\lambda_1b_1 + \lambda_2b_2}{\lambda_1+\lambda_2} = \lambda b_1 + (1 - \lambda)b_2\\ \lambda (\left[ \matrix{ a_1\\ b_1\\ } \right] - \left[ \matrix{ a_2\\ b_2\\ } \right]) + \left[ \matrix{ a_2\\ b_2\\ } \right] \]
我们考虑将问题转化一下
首先我们想知道\((a_1,b_1)\)和\((a_2,b_2)\)能够配制出什么比例的溶液
令\(\lambda_1\)为\(1\)号瓶使用的量,\(\lambda_2\)为\(2\)号瓶使用的量
则混合溶液中物质\(A\)的含量为\(\lambda_1a_1 + \lambda_2a_2\),物质\(B\)的含量为\(\lambda_1b_1 + \lambda_2b_2\)
混合溶液中物质\(A\)的比例为\(\frac{\lambda_1a_1 + \lambda_2a_2}{\lambda_1+\lambda_2}\),物质\(B\)的比例为\(\frac{\lambda_1b_1 + \lambda_2b_2}{\lambda_1+\lambda_2}\)
令\(\lambda = \frac{\lambda_1}{\lambda_1+\lambda_2},\lambda \in[0,1]\),则:
显然\((a_1,b_1)\)和\((a_2,b_2)\)能够配制出的溶液一定是两个点所连成的线段中的所有点
那么对于加入第三瓶溶液来说,可以配制的溶液在二维平面上形成了一个三角形区域
只要\((x,y)\)位于三角形的内部或边界,则一定可以配制成功
那么只要进行\(3\)次\(to\_left\)测试即可
注意:三角形有可能退化成三点共线,用叉积特判该情况即可
using point_type = long long;
// 点与向量
template <typename T>
struct point
{
T x, y;
bool operator==(const point &a) const
{
return (fabs(x - a.x) <= eps && fabs(y - a.y) <= eps);
}
bool operator<(const point &a) const
{
if (fabs(x - a.x) <= eps)
return y < a.y - eps;
return x < a.x - eps;
}
bool operator>(const point &a) const
{
return !(*this < a || *this == a);
}
point operator+(const point &a) const
{
return {x + a.x, y + a.y};
}
point operator-(const point &a) const
{
return {x - a.x, y - a.y};
}
point operator-() const
{
return {-x, -y};
}
point operator*(const T k) const
{
return {k * x, k * y};
}
point operator/(const T k) const
{
return {x / k, y / k};
}
// 点积
T operator*(const point &a) const
{
return x * a.x + y * a.y;
}
// 叉积
T operator^(const point &a) const
{
return x * a.y - y * a.x;
}
// to_left 测试
int to_left(const point &a) const
{
auto t = (*this) ^ a;
return (t > eps) - (t < -eps);
}
// 模长的平方
T quad_len() const
{
return (*this) * (*this);
}
// 两点距离的平方
T quad_dis(const point &a) const
{
return (a - (*this)).quad_len();
}
// 向量模长
long double len() const
{
return sqrtl(quad_len());
}
// 两点距离
long double dis(const point &a) const
{
return sqrtl(quad_dis(a));
}
// 向量旋转
point rot(const long double rad) const
{
return {x * cos(rad) - y * sin(rad), x * sin(rad) + y * cos(rad)};
}
};
using Point = point<point_type>;
// 线段
template <typename T>
struct segment
{
point<T> a, b;
// 判断点是否在线段上
// -1 代表点在线段端点处, 0 代表点不在线段上, 1 代表点严格在线段上
int is_on(const point<T> &p) const
{
// 点在端点处
if (p == a || p == b)
return -1;
return (p - a).to_left(p - b) == 0 && (p - a) * (p - b) < -eps;
}
};
using Segment = segment<point_type>;
int q;
int a1, b1, a2, b2, a3, b3;
void solve()
{
cin >> a1 >> b1 >> a2 >> b2 >> a3 >> b3;
Point a = {a1, b1}, b = {a2, b2}, c = {a3, b3};
Segment l1 = {a, b}, l2 = {b, c}, l3 = {a, c};
cin >> q;
while (q--)
{
int x, y;
cin >> x >> y;
Point p = {x, y};
// 判断点是否爱线段上
if (l1.is_on(p) || l2.is_on(p) || l3.is_on(p))
cout << "YES" << endl;
else
{
// // 特判三点共线的情况
if (((b - a) ^ (c - a)) == 0)
{
cout << "NO" << endl;
continue;
}
if ((b - a).to_left(p - a) == -1 && (c - b).to_left(p - b) == -1 && (a - c).to_left(p - c) == -1 ||
(b - a).to_left(p - a) == 1 && (c - b).to_left(p - b) == 1 && (a - c).to_left(p - c) == 1)
cout << "YES" << endl;
else
cout << "NO" << endl;
}
}
}
三角碰撞(Triangle Collision)
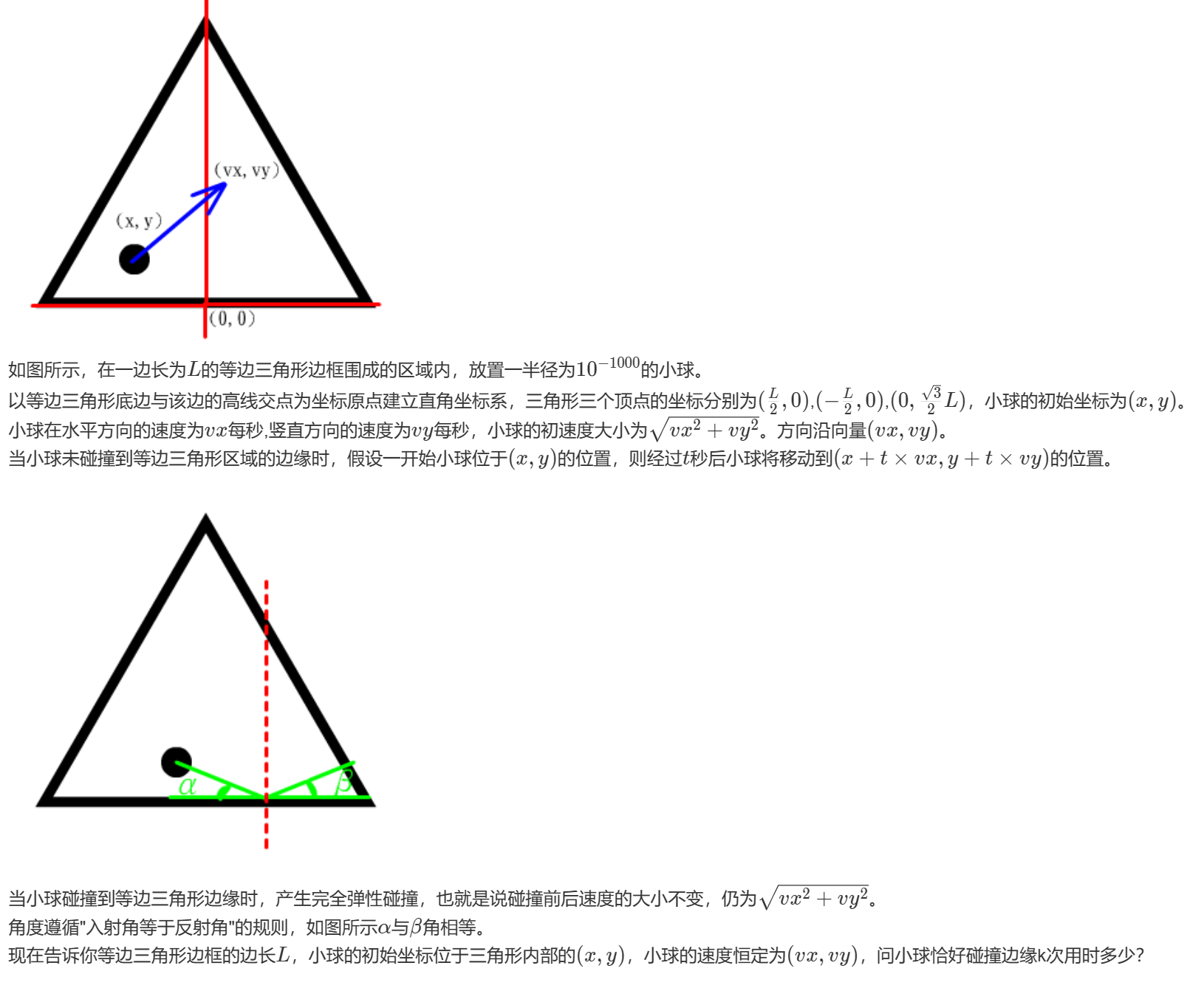
题解
- 反射是一个经典的问题,我们考虑将这个问题进行转化
- 如果我们不把小球的碰撞当作反射,而是继续运动,那么会发生什么呢?
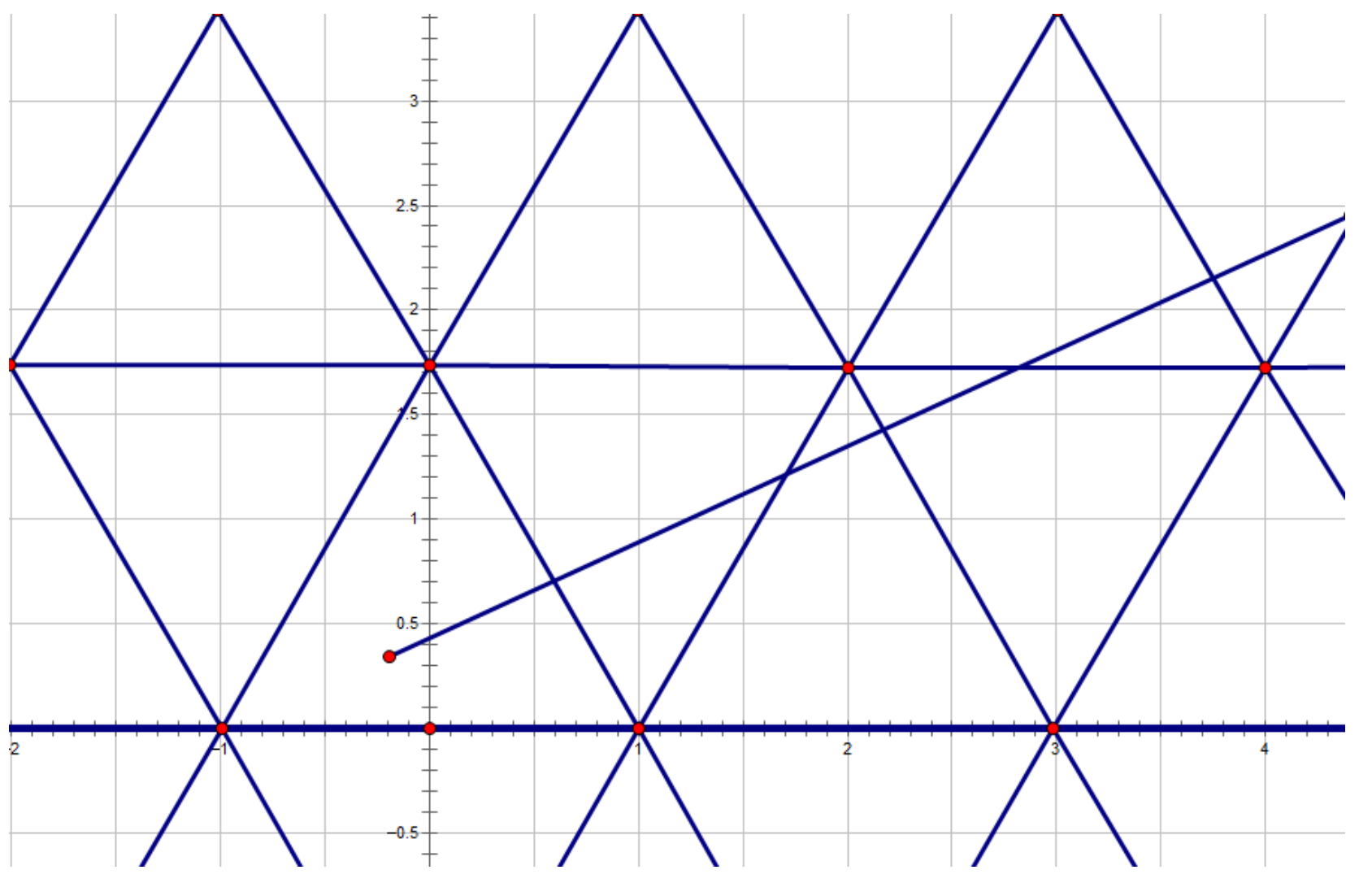
- 显然我们容易发现,我们只需要把平面拓展成由无数个等边三角形组成,那么反射几次的问题就转换成了:
- 从起点出发的一条直线,与其他直线交第\(k\)次时所花费的时间
- 那么显然我们可以二分时间
- \(check\)的时候我们计算出与\(3\)种直线一共由多少个交点即可
- 那么现在的问题就是怎样快速知道有几个交点
- 假设时间为\(t\),对于\(y = b\)这一类直线来说,在垂直方向上运动的距离\(s = v_y*t\),而每条直线之间的距离为\(\frac{\sqrt{3}}{2}L\),那么我们显然可以\(O(1)\)得到与\(y = b\)这类直线的交点个数,当然我们对于\(v_y\)的正负需要简单分类讨论一下
- 那对于其他两种直线\(y = \sqrt{3}x+b,y = -\sqrt{3}x + b\)来说呢?
- 这又是一个经典的问题:我们可以考虑旋转坐标系
- 比如说:对于方向向量\((v_x,v_y)\)来说,如果要计算和\(y = \sqrt{3}x+b\)的交点个数时,我们考虑将方向向量逆时针旋转\(120°\)
- 当旋转完之后,操作和第一种直线是一样的
const long double PI = acos(-1.0);
using point_type = long double;
// 点与向量
template <typename T>
struct point
{
T x, y;
bool operator==(const point &a) const
{
return (fabs(x - a.x) <= eps && fabs(y - a.y) <= eps);
}
bool operator<(const point &a) const
{
if (fabs(x - a.x) <= eps)
return y < a.y - eps;
return x < a.x - eps;
}
bool operator>(const point &a) const
{
return !(*this < a || *this == a);
}
point operator+(const point &a) const
{
return {x + a.x, y + a.y};
}
point operator-(const point &a) const
{
return {x - a.x, y - a.y};
}
point operator-() const
{
return {-x, -y};
}
point operator*(const T k) const
{
return {k * x, k * y};
}
point operator/(const T k) const
{
return {x / k, y / k};
}
// 点积
T operator*(const point &a) const
{
return x * a.x + y * a.y;
}
// 叉积
T operator^(const point &a) const
{
return x * a.y - y * a.x;
}
// to_left 测试
int to_left(const point &a) const
{
auto t = (*this) ^ a;
return (t > eps) - (t < -eps);
}
// 模长的平方
T quad_len() const
{
return (*this) * (*this);
}
// 两点距离的平方
T quad_dis(const point &a) const
{
return (a - (*this)).quad_len();
}
// 向量模长
long double len() const
{
return sqrtl(quad_len());
}
// 两点距离
long double dis(const point &a) const
{
return sqrtl(quad_dis(a));
}
// 向量逆时针旋转
point rotate(const long double rad) const
{
return {x * cos(rad) - y * sin(rad), x * sin(rad) + y * cos(rad)};
}
};
using Point = point<point_type>;
// 直线
template <typename T>
struct line
{
// p 为直线上的一点, v 是方向向量
point<T> p, v;
bool operator==(const line &a) const
{
return v.to_left(a.v) == 0 && v.to_left(a.p) == 0;
}
int to_left(const point<T> &a) const
{
return v.to_left(a - p);
}
// 直线交点
point<T> inter(const line &a) const
{
return p + v * ((a.v ^ (p - a.p)) / (v ^ a.v));
}
// 点到直线的距离
long double dis(const point<T> &a) const
{
return abs(v ^ (a - p)) / v.len();
}
// 点在直线上的投影
point<T> project(const point<T> &a) const
{
return p + v * ((a - p) * v / (v * v));
}
};
using Line = line<point_type>;
int k;
long double L, x, y, h, vx, vy, d1, d2, d3;
Point v1, v2, v3;
bool check(long double mid)
{
int cnt1 = 0, cnt2 = 0, cnt3 = 0;
long double s = v1.y * mid;
if (s > 0)
{
s -= (h - d1);
cnt1 = (int)ceill(s / h);
}
else if (s < 0)
{
s = fabs(s);
s -= d1;
cnt1 = (int)ceill(s / h);
}
s = v2.y * mid;
if (s > 0)
{
s -= (h - d2);
cnt2 = (int)ceill(s / h);
}
else if (s < 0)
{
s = fabs(s);
s -= d2;
cnt2 = (int)ceill(s / h);
}
s = v3.y * mid;
if (s > 0)
{
s -= (h - d3);
cnt3 = (int)ceill(s / h);
}
else if (s < 0)
{
s = fabs(s);
s -= d3;
cnt3 = (int)ceill(s / h);
}
return cnt1 + cnt2 + cnt3 >= k;
}
void solve()
{
cin >> L >> x >> y >> vx >> vy >> k;
h = sqrtl(3) / 2.0 * L;
v1 = {vx, vy};
v2 = v1.rotate(2.0 * PI / 3);
v3 = v1.rotate(-2.0 * PI / 3);
Point p = {x, y};
Point A = {-L / 2.0, 0};
Point B = {L / 2.0, 0};
Point C = {0, h};
Line ab = {A, B - A};
Line bc = {B, C - B};
Line ca = {C, A - C};
d1 = ab.dis(p);
d2 = ca.dis(p);
d3 = bc.dis(p);
long double l = 0, r = 1e10;
while (r - l >= eps)
{
long double mid = (l + r) / 2;
if (check(mid))
r = mid;
else
l = mid;
}
cout << fixed << setprecision(8) << r << endl;
}