esp32 + OBD实验
整体的思路是使用esp32 + obd模拟器 控制can总线实现车况检测
代码在hello_world文件夹中
esp32_learn/obd at master · doincli/esp32_learn · GitHub
解决问题
1.esp32这端如何自动识别不同的CAN的速率
2.对于不同的OBD协议 esp32这段如何同时支持
思路:
对于这两个问题,使用轮询查找的方式,目前可以支持两种协议和两种不同速率共计四种情况。
第一个问题
CAN总线速率在OBD中主要是500K和250K,所以当通信的时候首先探测500K速率,看看能否正确读出数据,如果不能,则调整为250K速率进行探测。当获得正确数据时,保持这种速率进行数据传输
static const twai_timing_config_t t_config_250 = TWAI_TIMING_CONFIG_250KBITS();
static const twai_timing_config_t t_config_500 = TWAI_TIMING_CONFIG_500KBITS();
第二个问题
和第一个问题一样,首先查看第一种协议是否能读取正确的数据,如果不能,调整为第二种协议,这样就可以满足要求
整体思路
利用状态机来实现,轮询查找正确的协议,如果不正确,转移到下一个状态,直到找到正确的协议为止
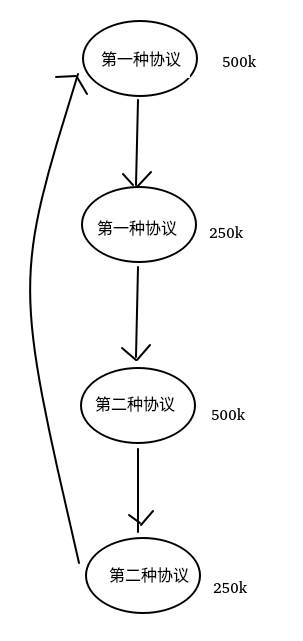
主函数的情况
枚举四种情况,并且使用状态机来进行状态的转移,主函数循环发送获得车速的请求,直到得到车速,得到后保持这种状态不变
enum
{
ISO15765_11bit_500K=1,
ISO15765_11bit_250K,
ISO15765_29bit_500K,
ISO15765_29bit_250K
}protocol;
uint8_t protocol_cur = ISO15765_11bit_500K; //当前协议
uint32_t now_speed; //汽车的速度
void app_main(void)
{
while (1)
{
vTaskDelay(100);
//状态机实现轮询探测
switch (protocol_cur)
{
case ISO15765_11bit_500K:
printf("ISO15765_11bit_500K start\n");
//配置这个协议得TWAI总线
OBD_twai_init_500();
//获取车速,获取失败则进入下一个协议继续探测,剩下同理
now_speed = OBD_get_engine_speed_val_protocol_11bit();
if (now_speed == -1)
{
protocol_cur = ISO15765_11bit_250K;
printf("next protocol is ISO15765_11bit_250K\n");
//
}else{
printf("speed of car is %ld\n",now_speed);
}
OBD_twai_deinit();
break;
case ISO15765_11bit_250K:
printf("ISO15765_11bit_250K start\n");
OBD_twai_init_250();
now_speed = OBD_get_engine_speed_val_protocol_11bit();
if (now_speed == -1)
{
protocol_cur = ISO15765_29bit_500K;
//
}else{
printf("speed of car is %ld\n",now_speed);
}
OBD_twai_deinit();
break;
case ISO15765_29bit_500K:
printf("ISO15765_29bit_500K start\n");
OBD_twai_init_500();
now_speed = OBD_get_engine_speed_val_protocol_29bit();
if (now_speed == -1)
{
protocol_cur = ISO15765_29bit_250K;
// OBD_twai_deinit();
}else{
printf("speed of car is %ld\n",now_speed);
}
OBD_twai_deinit();
break;
case ISO15765_29bit_250K:
printf("ISO15765_29bit_250K start\n");
OBD_twai_init_250();
now_speed = OBD_get_engine_speed_val_protocol_29bit();
if (now_speed == -1)
{
protocol_cur = ISO15765_11bit_500K;
// OBD_twai_deinit();
}else{
printf("speed of car is %ld\n",now_speed);
}
OBD_twai_deinit();
break;
default:
printf("event error\n");
break;
}
}
}
OBD函数情况
共计使用5个函数,作用如下图
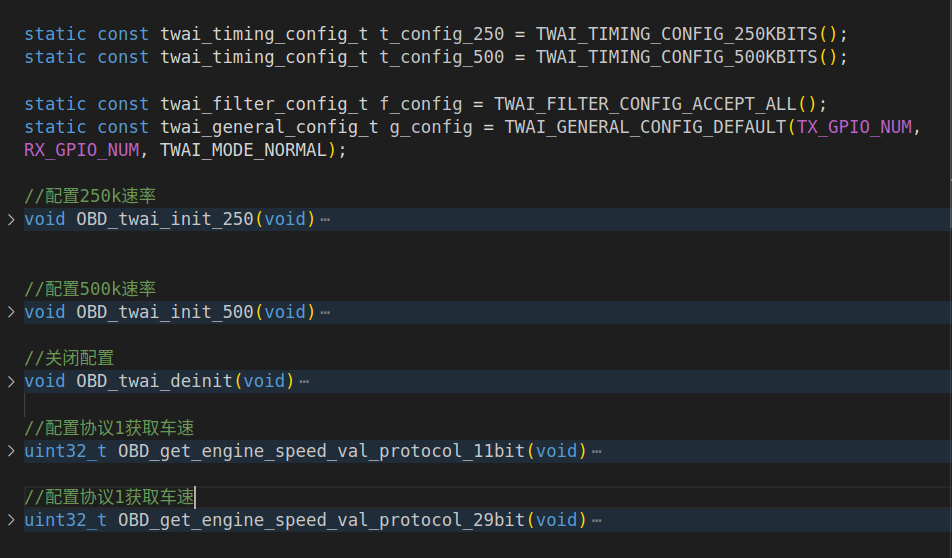
具体代码如下:
//基础配置
static const twai_timing_config_t t_config_250 = TWAI_TIMING_CONFIG_250KBITS();
static const twai_timing_config_t t_config_500 = TWAI_TIMING_CONFIG_500KBITS();
static const twai_filter_config_t f_config = TWAI_FILTER_CONFIG_ACCEPT_ALL();
static const twai_general_config_t g_config = TWAI_GENERAL_CONFIG_DEFAULT(TX_GPIO_NUM, RX_GPIO_NUM, TWAI_MODE_NORMAL);
//配置250k速率
void OBD_twai_init_250(void)
{
ESP_ERROR_CHECK(twai_driver_install(&g_config, &t_config_250, &f_config));
//printf("Driver installed\n");
ESP_ERROR_CHECK(twai_start());
// printf("Driver started\n");
}
//配置500k速率
void OBD_twai_init_500(void)
{
ESP_ERROR_CHECK(twai_driver_install(&g_config, &t_config_500, &f_config));
//printf("Driver installed\n");
ESP_ERROR_CHECK(twai_start());
// printf("Driver started\n");
}
//关闭配置
void OBD_twai_deinit(void)
{
ESP_ERROR_CHECK(twai_stop());
// printf("Driver stopped\n");
ESP_ERROR_CHECK(twai_driver_uninstall());
// printf("Driver uninstalled\n");
}
//配置协议1获取车速
uint32_t OBD_get_engine_speed_val_protocol_11bit(void)
{
uint8_t data_len_rel;
uint32_t engine_speed = 0;
/* 获取发动机转速的格式:
id:0x7df
数据位:8
data[0]:0x02 代表接下来7个数据字节中有效的字节数为2
data[1]:0x01 代表要获取动力相关数据
data[2]:0x0d 代表车速
*/
twai_message_t tx_msg = {.flags = TWAI_MSG_FLAG_NONE, .identifier = MSG_ID, .data_length_code = 8, .data = {0x02, 0x01, 0x0D, 0x00, 0x00, 0x00, 0x00, 0x00}};
twai_message_t rx_msg;
int flag_tran = twai_transmit(&tx_msg, pdMS_TO_TICKS(1000));
int flag_rec = twai_receive(&rx_msg, pdMS_TO_TICKS(1000));
if (flag_rec == ESP_ERR_TIMEOUT )
{
printf("protocol error!!\n");
return -1;
}
// OBD模拟器回复的数据帧id为0x7e8
if (rx_msg.identifier != 0x7e8)
{
printf("Get CAN frame id error!!\n");
return -1;
}
// data[0]代表接下来7个数据字节有效的字节数
data_len_rel = rx_msg.data[0];
if (data_len_rel < 2 || data_len_rel > 7)
{
printf("Get data rel len error!!\n");
return -1;
}
// receive data[1]为send data[1] + 0x40 receive data[2]等于send data[2]
if (rx_msg.data[1] != tx_msg.data[1] + 0x40 || rx_msg.data[2] != tx_msg.data[2])
{
printf("Get data return message error!!\n");
return -1;
}
for (int i = 3; i < data_len_rel+1; i++)
{
engine_speed = engine_speed*16 + rx_msg.data[i];
}
return engine_speed ;
}
//配置协议2获取车速
uint32_t OBD_get_engine_speed_val_protocol_29bit(void)
{
uint8_t data_len_rel;
uint32_t engine_speed = 0;
twai_message_t tx_msg = {.flags = TWAI_MSG_FLAG_EXTD, .identifier = MSG_ID_EXP, .data_length_code = 8, .data = {0x02, 0x01, 0x0D, 0x00, 0x00, 0x00, 0x00, 0x00}};
twai_message_t rx_msg;
esp_err_t flag_tran = twai_transmit(&tx_msg, pdMS_TO_TICKS(1000));
esp_err_t flag_rec = twai_receive(&rx_msg, pdMS_TO_TICKS(1000));
if (flag_rec == ESP_ERR_TIMEOUT )
{
printf("protocol error!!\n");
return -1;
}
if (rx_msg.identifier != 0x18daf110)
{
printf("Get CAN frame id error!!\n");
return -1;
}
// data[0]代表接下来7个数据字节有效的字节数
data_len_rel = rx_msg.data[0];
if (data_len_rel < 2 || data_len_rel > 7)
{
printf("Get data rel len error!!\n");
return -1;
}
// receive data[1]为send data[1] + 0x40 receive data[2]等于send data[2]
if (rx_msg.data[1] != tx_msg.data[1] + 0x40 || rx_msg.data[2] != tx_msg.data[2])
{
printf("Get data return message error!!\n");
return -1;
}
for (int i = 3; i < data_len_rel+1; i++)
{
engine_speed = engine_speed*16 + rx_msg.data[i];
}
return engine_speed ;
}
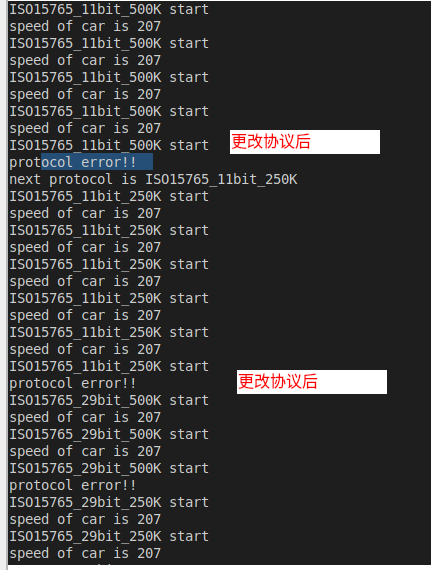
效果
效果如下图所示,当更改协议后,可以实现自动检测,并且读出数据
未来改进
- 这是面向过程的,后面封装改成面向对象的
- 处理完毕后使用蓝牙mesh 组网 实现板间、手机互传
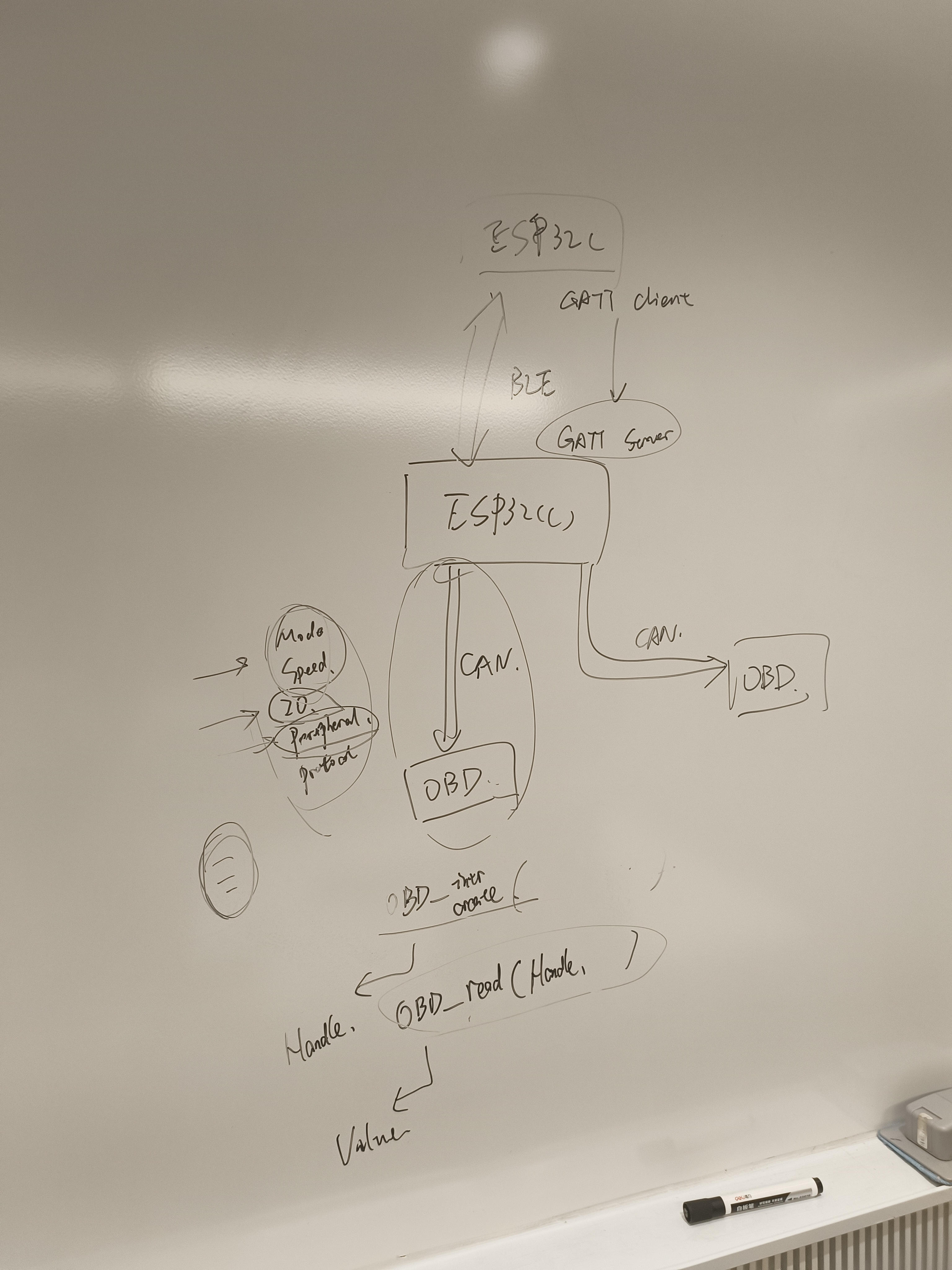
讨论的改进黑板笔记