《2.Linux驱动|瑞芯微rtc-hym8563移植笔记》
《3.Linux驱动 | Linux内核 RTC时间架构-基于瑞芯微》
0、环境
soc : rk3568
board: EVB1-DDR4-V10
软 件:Android 11
Linux:4.19.232
一、ov13850简介
1. 产品参数
- 品牌:Omnivision
- 型号:CMK-OV13850
- 接口:MIPI
- 像素:1320W

OV13850彩色图像传感器是一款低电压、高性能1/3.06英寸1320万像素CMOS图像传感器,使用OmniBSI+?技术提供了单-1320万像素(4224×3136)摄像头的功能。通过串行摄像头控制总线(SCCB)接口的控制,它提供了全帧、下采样、开窗的10位MIPI图像。
OV13850拥有一个能够在10位1320万像素分辨率下以每秒24帧(fps)的速度运行的图像阵列,用户可以完全控制图像质量、格式和输出数据传输。所有需要的图像处理功能,包括曝光控制、白平衡、缺陷像素消除等,都可以通过SCCB接口进行编程。
此外,OmniBSI图像传感器使用专有的传感器技术,通过减少或消除固定图案噪声、污迹等常见的图像污染光源来提高图像质量,从而产生干净、完全稳定的彩色图像。
为了提供定制信息,OV13850包括一个单编程(OPT)存储器。OV13850拥有最多4车道的MIPI接口。
OV13850适用于低功耗相机模块。
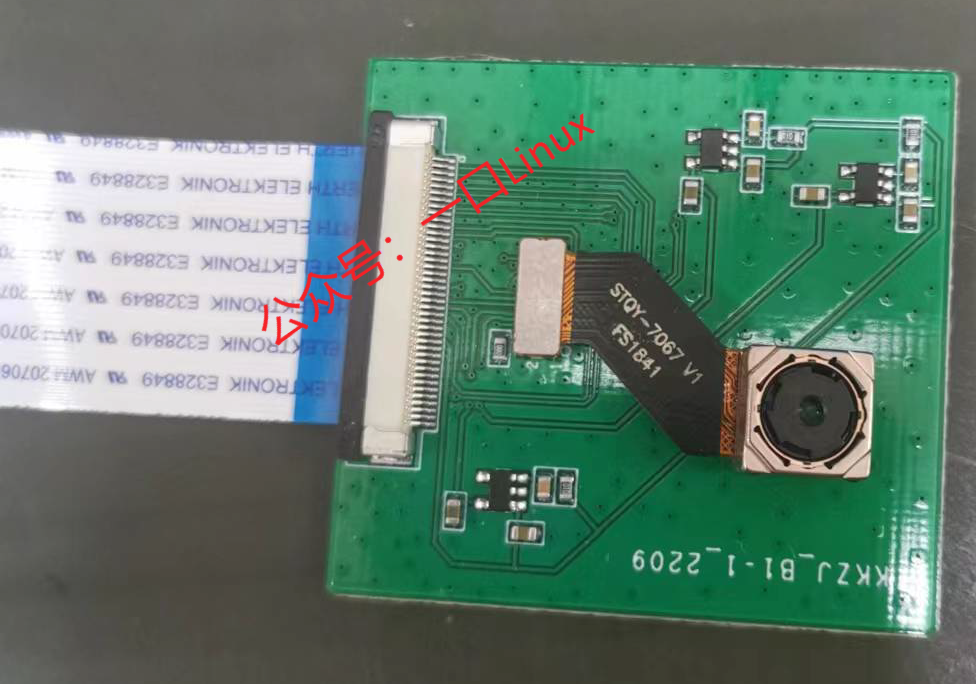
以下是测试用的摄像头&扩展板:
2. 特性
●镜头尺寸:1/3.06英寸
●像素大小:1.12毫米×1.12毫米
●31.2°CRA为6mm z高度
●可编程控制帧速率,镜像和翻转,裁剪和窗口
●1320万像素AT30fps
●双线串行总线控制(SCCB)
●闪光灯输出控制闪光
●支持输出格式:10位RAW RGB
●支持图像大小:13.2MP(4224×3136)、10MP(4224×2376)、4K2K(3840×2160)、EIS 1080P(2112×1188)、EIS 720P(1408×792)、more3
●支持2×2 Binning
●可达4车道MIPI串行输出接口
●标准系列SCCB接口
●8k bit的嵌入式一次性可编程(OTP)存储器(见侧注)
●两个片上锁相环(PLLs)
●可编程控制:增益、曝光、帧率、图像大水、水平反射镜、垂直翻转裁剪和平移
●内置温度传感器
●图像质量控制:缺陷校正,自动黑电平校准,镜头阴影校正,和高度计行HDR。
●保证传感器结温:-300C到+850C
●电源核心:1.14V-1.26V;模拟:2.6-3.0V输入/输出:1.7-3.0V
●封装:PLCC40
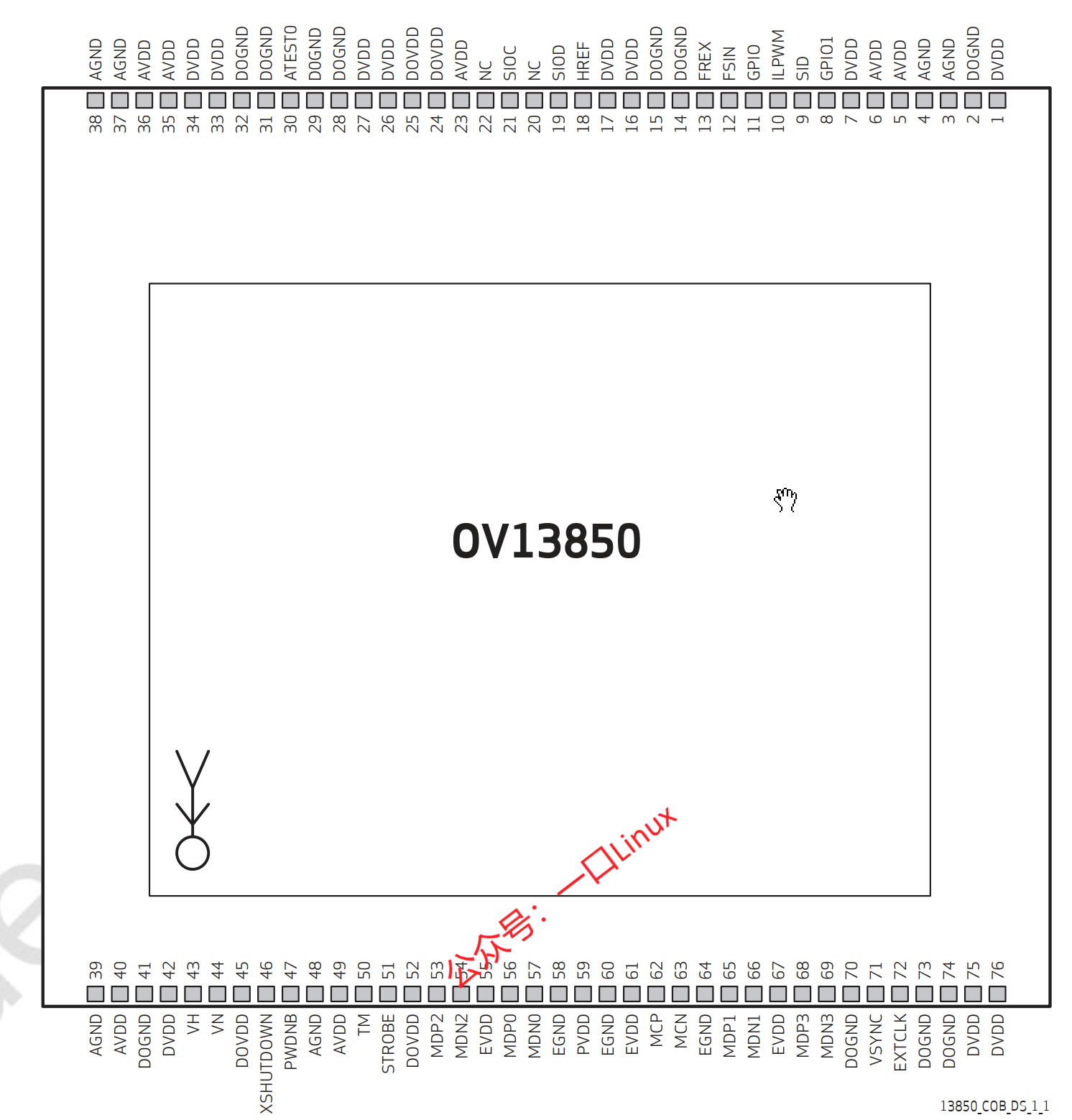
3. ov13850引脚图
4. ov13850功能模块
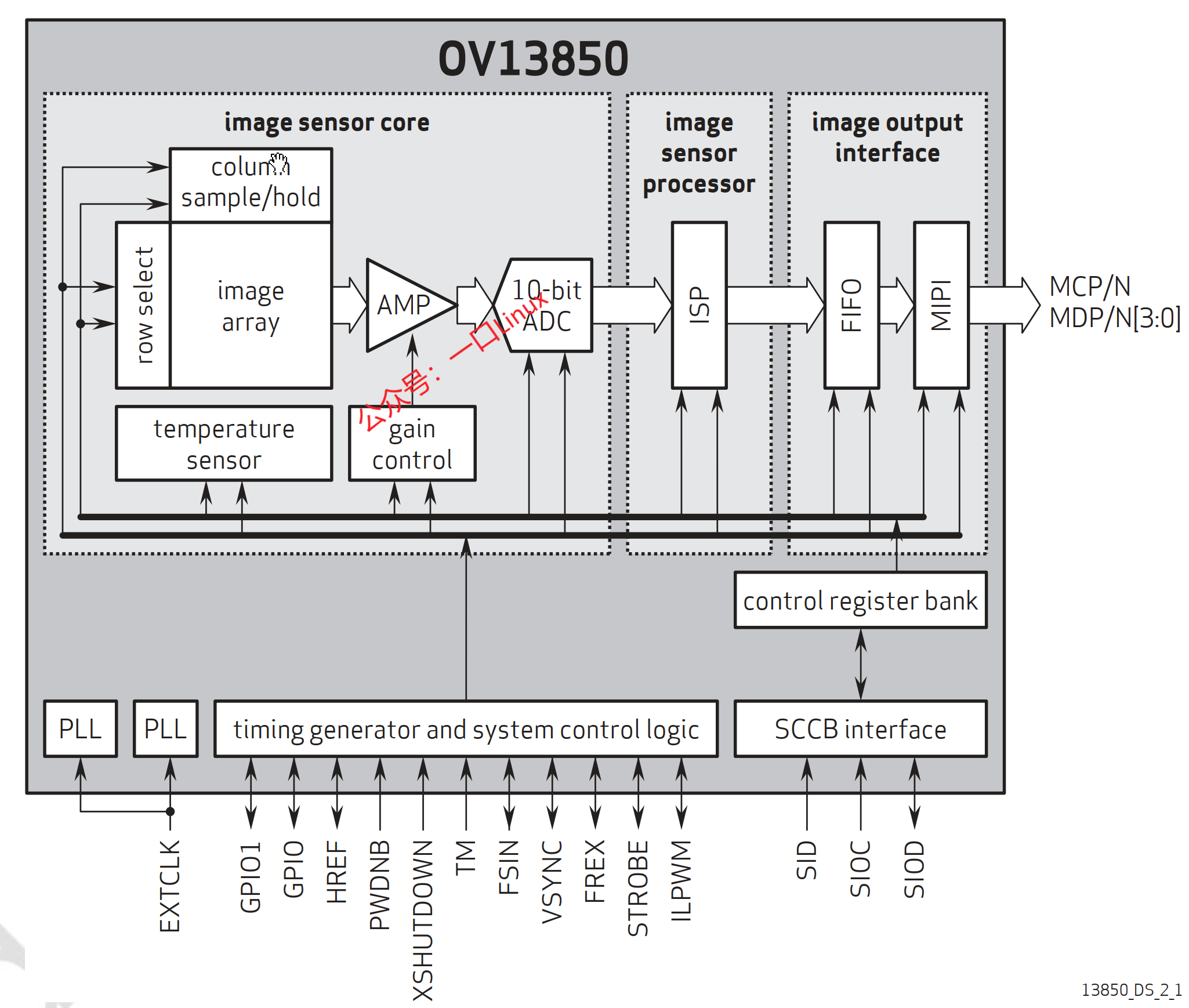
定时脉冲发生器输出时钟来访问成像阵列的行,预先填充电荷并且按顺序对数组的行进行采样。
在预先填充电荷和采样的时间间隔内,每个像素点的电荷曝光时减少入射光。
这是在滚动快门的体系结构的曝光时间。
曝光时间通过调整预先填充电荷和采样之间的时间间隔控制。
在每一行的像素数据采样后,通过模拟电路(AMP)进一步处理:纠正偏移量和将数据乘以相应的增益。
模拟处理后通过10位ADC的输出数组中的每个像素的数据。
ISP(image sensor processor)通过图像输出接口单元,经过mipi接口(MCP/MDP)将图像数据发送出去。
5. 像素数组
OV13850传感器的图像数组4256列3152行(13414912像素)
颜色过滤器是安排在Bayer模式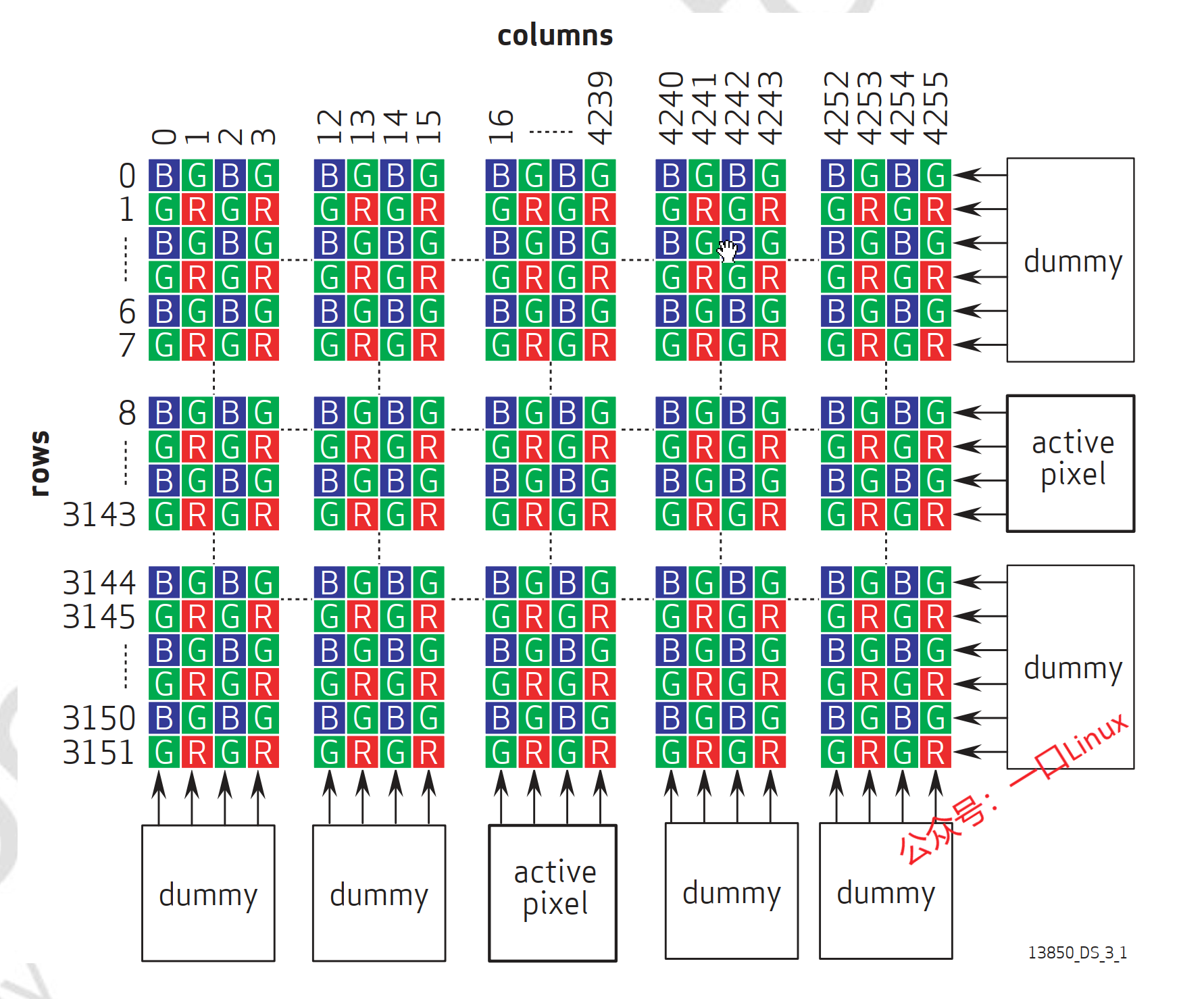
Binning mode 2x2 binning
Binning mode 通常用于低分辨率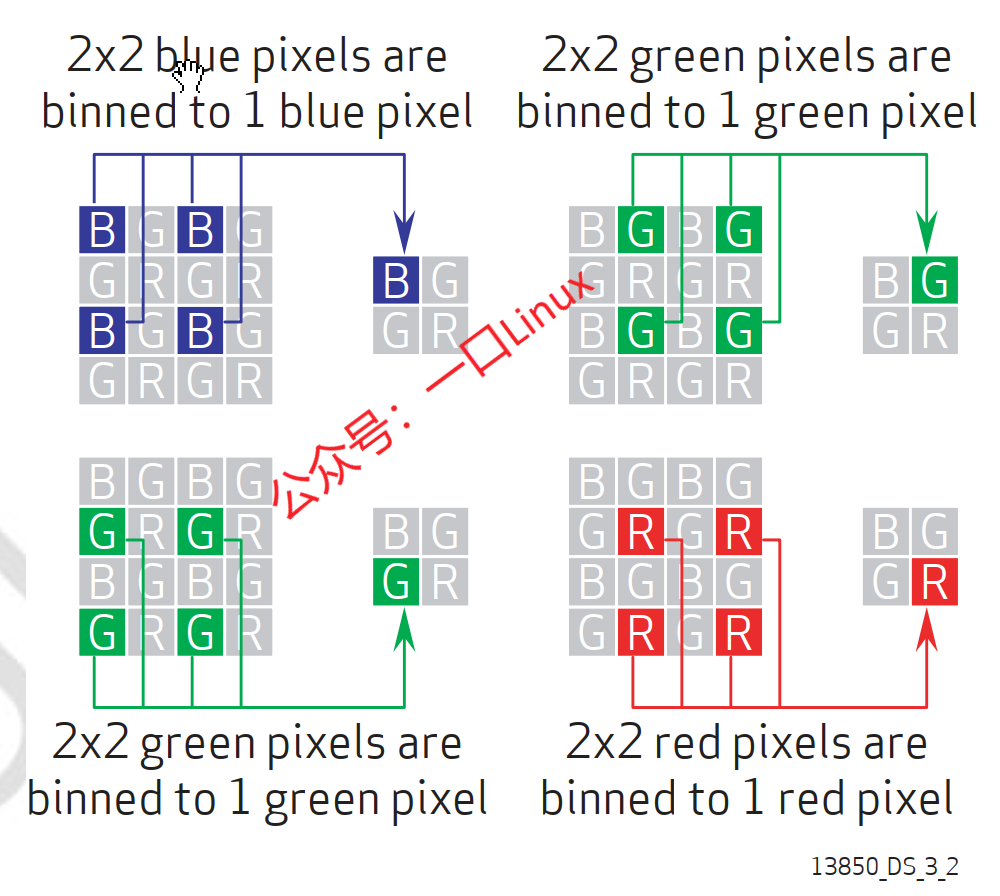
6. mirror 和 flip
OV13850提供图像mirror(左右翻转) 和 flip(上下翻转)模式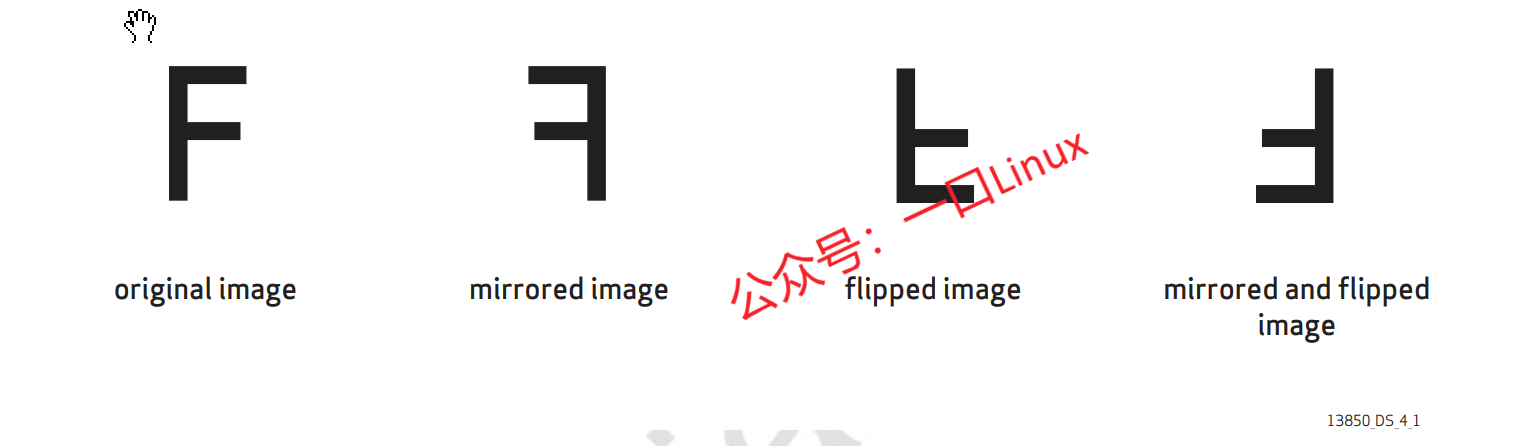
二、驱动移植
瑞芯微支持的摄像头,有个support list,
此次从该list中选择了ov13850
1. 驱动源文件及对应脚本
默认sdk里面已经将支持的所有摄像头驱动都添加到了内核,所以不需要移植该驱动了,
但是还是要确认下移植驱动对应的一些信息
- 源程序
rk_android11.0_sdk_220718\kernel\drivers\media\i2c\ov13850.c
rk_android11.0_sdk_220718\kernel\include\config\video\ov13850.h
- kernel/drivers/media/i2c/Makefile
115 obj-$(CONFIG_VIDEO_OV13850) += ov13850.o
- kernel/drivers/media/i2c/Kconfig
1282 config VIDEO_OV13850
1283 tristate "OmniVision OV13850 sensor support"
1284 depends on I2C && VIDEO_V4L2 && VIDEO_V4L2_SUBDEV_API
1285 depends on MEDIA_CAMERA_SUPPORT
1286 select V4L2_FWNODE
1287 ---help---
1288 This is a Video4Linux2 sensor driver for the OmniVision
1289 OV13850 camera.
- 驱动对应的宏开关
kernel/arch/arm64/configs/rockchip_defconfig
581 CONFIG_VIDEO_OV13850=y
2. 设备树
1)典型ov系列摄像头链接示意图
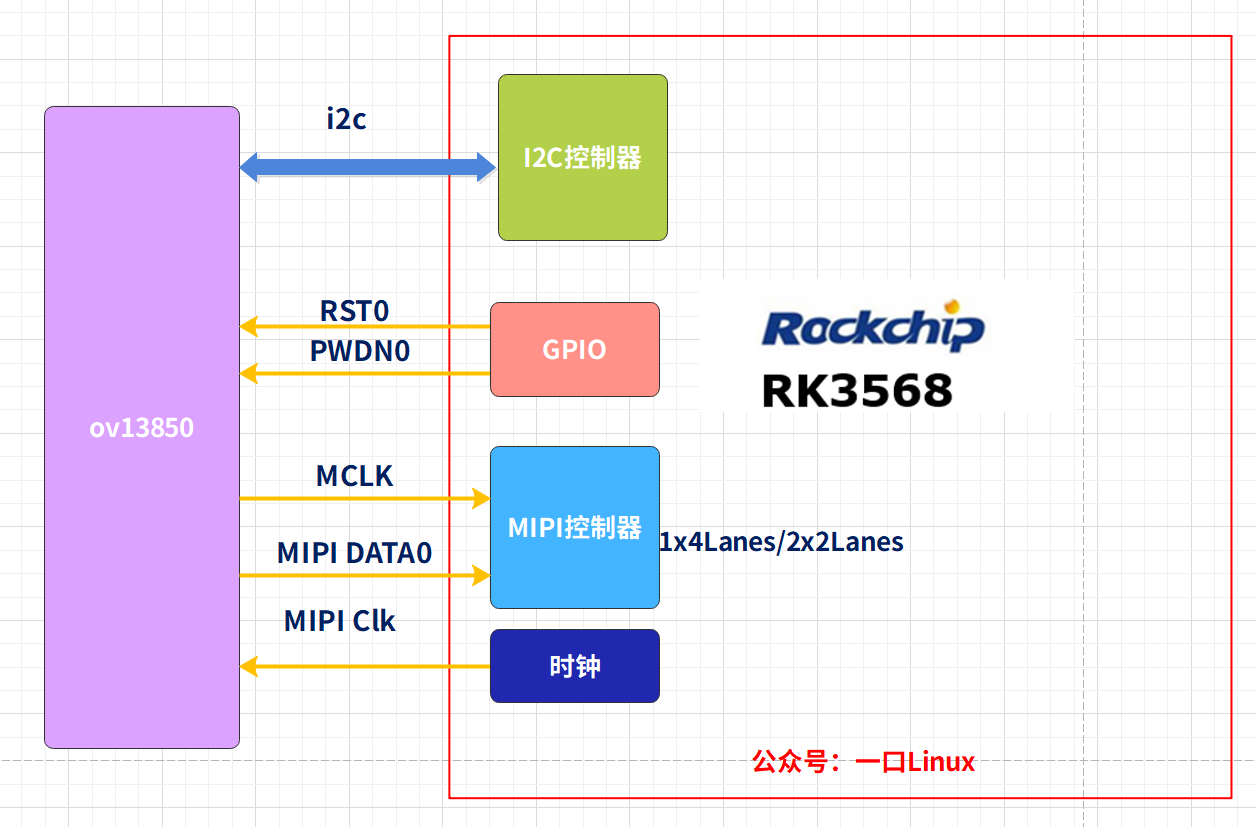
ov系列摄像头与SOC连接的主要的引脚有:
i2c、rst、pwdn、mclk、MIPI Clk、MIPI DATA
这几根线是驱动工程师必须捋清楚的
2)电路图
本次我们直接将摄像头插在公版的视频接口,用的是通道0,使用了4个lane【不知道具体硬件信息就问硬件工程师】
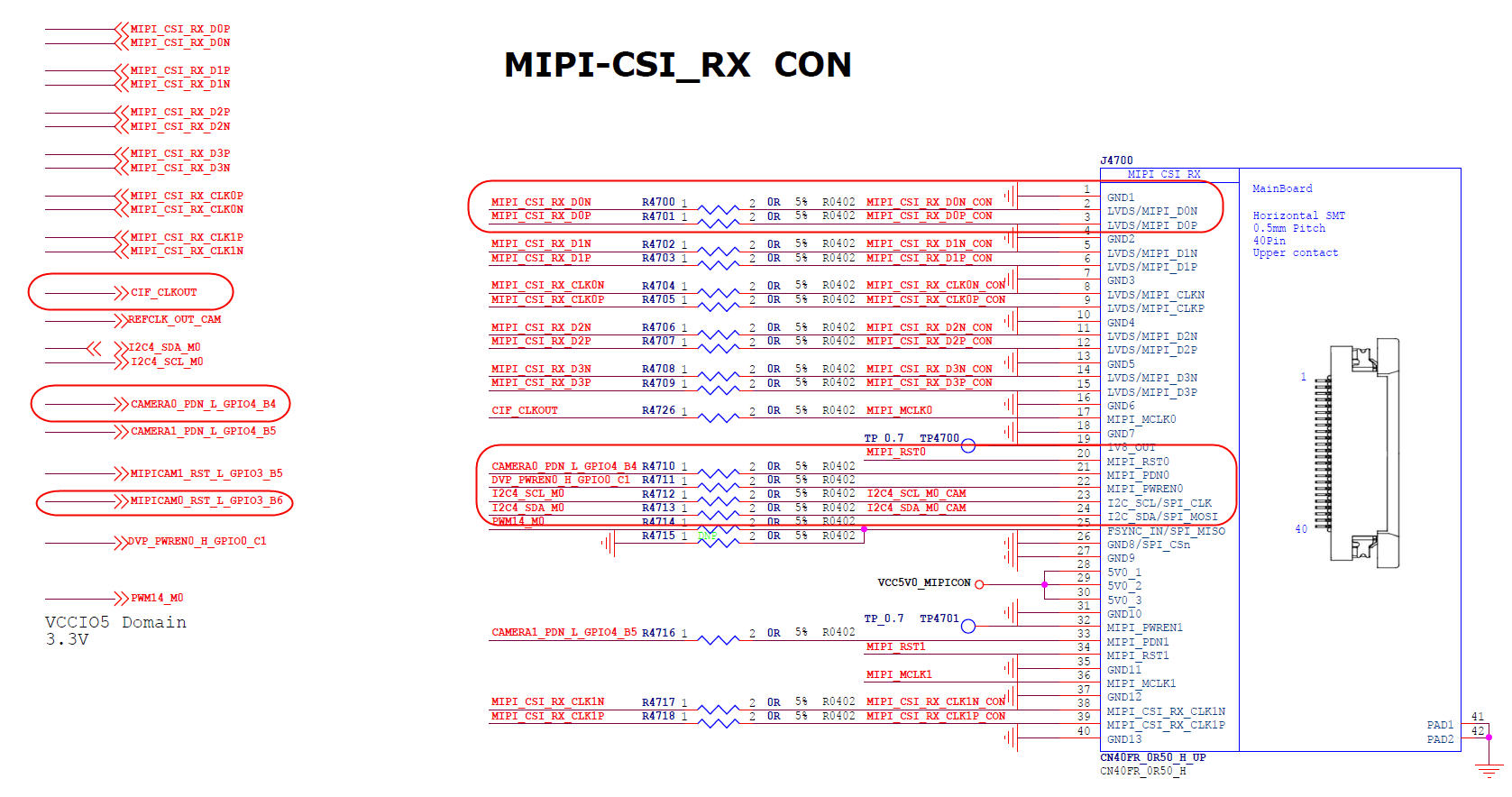
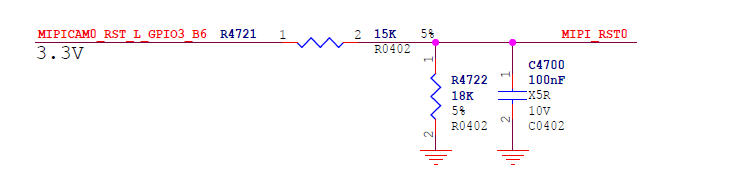
由电路图可知,几个关键引脚关系:
- reset信号:GPIO3 B6
- power down信号:GPIO4 B4
- I2C通道:4
- clock:cif
3)设备树节点
参考sdk中其他平台的ov13850节点来填写
kernel/arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dtsi
ov13850: ov13850@10 {
status = "okay";
compatible = "ovti,ov13850";
reg = <0x10>;
clocks = <&cru CLK_CIF_OUT>;
clock-names = "xvclk";
power-domains = <&power RK3568_PD_VI>;
pinctrl-names = "default";
pinctrl-0 = <&cif_clk>;
reset-gpios = <&gpio3 RK_PB6 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio4 RK_PB4 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "ZC-OV13850R2A-V1";
rockchip,camera-module-lens-name = "Largan-50064B31";
port {
ov13850_out: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
data-lanes = <1 2 3 4>;
};
};
};
114 &csi2_dphy0 {
115 status = "okay";
116
117 ports {
118 #address-cells = <1>;
119 #size-cells = <0>;
120 port@0 {
121 reg = <0>;
122 #address-cells = <1>;
123 #size-cells = <0>;
124
125 mipi_in_ucam0: endpoint@1 {
126 reg = <1>;
127 remote-endpoint = <&ov13850_out>;
128 data-lanes = <1 2 3 4>;
129 };
……
152 };
设备树的信息最终转换成i2c_client,并传递给ov13850驱动ov13850_probe()
compatible = "ovti,ov13850";与驱动的of_match_table 保持一致
@rk_android11.0_sdk\kernel\drivers\media\i2c\ov13850.c
#if IS_ENABLED(CONFIG_OF)
static const struct of_device_id ov13850_of_match[] = {
{ .compatible = "ovti,ov13850" },
{},
};
MODULE_DEVICE_TABLE(of, ov13850_of_match);
#endif
static const struct i2c_device_id ov13850_match_id[] = {
{ "ovti,ov13850", 0 },
{ },
};
static struct i2c_driver ov13850_i2c_driver = {
.driver = {
.name = OV13850_NAME,
.pm = &ov13850_pm_ops,
.of_match_table = of_match_ptr(ov13850_of_match),
},
.probe = &ov13850_probe,
.remove = &ov13850_remove,
.id_table = ov13850_match_id,
};
关于摄像头驱动,
彭老师后面会继续更一篇文章讲解。
3. 安卓配置文件
在以下两个文件增加对应摄像头信息,
hardware/rockchip/camera/etc/camera/camera3_profiles_rk356x.xml
hardware/rockchip/camera/etc/camera/camera3_profiles.xml
一口君直接参考的其他文件,
然后找一个相近型号的摄像头修改的
三、查看摄像头相关信息
1. 开机log
移植成功后,确认下对应的驱动log
10-26 17:58:54.659 0 0 I ov13850 4-0010: driver version: 00.01.05
10-26 17:58:54.659 0 0 W ov13850 4-0010: Failed to get power-gpios, maybe no use
10-26 17:58:54.659 0 0 W ov13850 4-0010: 4-0010 supply avdd not found, using dummy regulator
10-26 17:58:54.659 0 0 I ov13850 4-0010: Linked as a consumer to regulator.0
10-26 17:58:54.659 0 0 W ov13850 4-0010: 4-0010 supply dovdd not found, using dummy regulator
10-26 17:58:54.659 0 0 W ov13850 4-0010: 4-0010 supply dvdd not found, using dummy regulator
10-26 17:58:54.660 0 0 E ov13850 4-0010: could not get default pinstate
10-26 17:58:54.660 0 0 E ov13850 4-0010: could not get sleep pinstate
10-26 17:58:54.665 0 0 I ov13850 4-0010: Detected OV00d850 sensor, REVISION 0xb2
10-26 17:58:54.665 0 0 I rockchip-csi2-dphy csi2-dphy0: dphy0 matches m00_b_ov13850 4-0010:bus type 4
2. 查看ov13850设备
驱动加载成功后,会有以下信息
- 查看摄像头设备节点:
rk3568_r:/ # ls /dev/video* -l
ls /dev/video* -l
crw-rw---- 1 media camera 81, 0 2022-10-31 06:56 /dev/video0
crw-rw---- 1 media camera 81, 1 2022-10-31 06:56 /dev/video1
crw-rw---- 1 media camera 81, 2 2022-10-31 06:56 /dev/video2
crw-rw---- 1 media camera 81, 3 2022-10-31 06:56 /dev/video3
crw-rw---- 1 media camera 81, 4 2022-10-31 06:56 /dev/video4
crw-rw---- 1 media camera 81, 5 2022-10-31 06:56 /dev/video5
crw-rw---- 1 media camera 81, 6 2022-10-31 06:56 /dev/video6
crw-rw---- 1 media camera 81, 7 2022-10-31 06:56 /dev/video7
crw-rw---- 1 media camera 81, 8 2022-10-31 06:56 /dev/video8
3. 查看sys文件系统中文件信息
内核会为摄像头在目录/sys/class/video4linux下分配设备信息描述文件
rk3568_r:/ # grep ov13850 /sys/class/video4linux/v*/name
grep ov13850 /sys/class/video4linux/v*/name
/sys/class/video4linux/v4l-subdev3/name:m00_b_ov13850 4-0010
rk3568_r:/ # grep "" /sys/class/video4linux/v*/name | grep mainpath
grep "" /sys/class/video4linux/v*/name | grep mainpath
/sys/class/video4linux/video0/name:rkisp_mainpath
4. 查看拓扑 media-ctl -d /dev/media0 -p
rk3568_r:/ # media-ctl -d /dev/media0 -p
media-ctl -d /dev/media0 -p
Opening media device /dev/media0
Enumerating entities
Found 13 entities
Enumerating pads and links
Media controller API version 0.0.255
Media device information
------------------------
driver rkisp-vir0
model rkisp0
serial
bus info
hw revision 0x0
driver version 0.0.255
Device topology
- entity 1: rkisp-isp-subdev (4 pads, 7 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SBGGR10/4224x3136
crop.bounds:(0,0)/4096x3072
crop:(0,0)/4096x3072]
<- "rkisp-csi-subdev":1 []
<- "rkisp_rawrd0_m":0 []
<- "rkisp_rawrd2_s":0 []
pad1: Sink
<- "rkisp-input-params":0 []
pad2: Source
[fmt:YUYV2X8/4096x3072
crop.bounds:(0,0)/4096x3072
crop:(0,0)/4096x3072]
-> "rkisp_mainpath":0 []
-> "rkisp_selfpath":0 []
pad3: Source
-> "rkisp-statistics":0 []
- entity 6: rkisp-csi-subdev (6 pads, 5 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev1
pad0: Sink
<- "rockchip-csi2-dphy0":1 []
pad1: Source
-> "rkisp-isp-subdev":0 []
pad2: Source
-> "rkisp_rawwr0":0 []
pad3: Source
pad4: Source
-> "rkisp_rawwr2":0 []
pad5: Source
-> "rkisp_rawwr3":0 []
- entity 13: rkisp_mainpath (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video0
pad0: Sink
<- "rkisp-isp-subdev":2 []
- entity 19: rkisp_selfpath (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video1
pad0: Sink
<- "rkisp-isp-subdev":2 []
- entity 25: rkisp_rawwr0 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video2
pad0: Sink
<- "rkisp-csi-subdev":2 []
- entity 31: rkisp_rawwr2 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video3
pad0: Sink
<- "rkisp-csi-subdev":4 []
- entity 37: rkisp_rawwr3 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video4
pad0: Sink
<- "rkisp-csi-subdev":5 []
- entity 43: rkisp_rawrd0_m (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video5
pad0: Source
-> "rkisp-isp-subdev":0 []
- entity 49: rkisp_rawrd2_s (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video6
pad0: Source
-> "rkisp-isp-subdev":0 []
- entity 55: rkisp-statistics (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video7
pad0: Sink
<- "rkisp-isp-subdev":3 []
- entity 61: rkisp-input-params (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video8
pad0: Source
-> "rkisp-isp-subdev":1 []
- entity 67: rockchip-csi2-dphy0 (2 pads, 2 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev2
pad0: Sink
<- "m00_b_ov13850 4-0010":0 []
pad1: Source
-> "rkisp-csi-subdev":0 []
- entity 70: m00_b_ov13850 4-0010 (1 pad, 1 link)
type V4L2 subdev subtype Sensor
device node name /dev/v4l-subdev3
pad0: Source
[fmt:SBGGR10/4224x3136]
-> "rockchip-csi2-dphy0":0 []
从entity70信息中可以看到:
- 该Entity完整的名称是:m00_b_ov13850 4-0010
- 它是一个V4L2 subdev(Sub-Device) Sensor
- 它对应的节点是/dev/v4l-subdev3,应用程序(如v4l2-ctl)可以打开它,并进行配置
- 它仅有一个输出(Source)节点,记为pad0
- 它的输出格式是[fmt:SBGGR10/4224x3136],其中SBGGR10是一种mbus-code的简称
- 它的Source pad0 链接到"rockchip-csi2-dphy0"的pad0,并且当前的状态是 ENABLED。
三、拍照测试
1. 抓帧
rk3568_r:/ # v4l2-ctl -d /dev/video0 --set-fmt-video=width=800,height=600,pixelformat=NV12 --stream-mmap=3 --stream-to=/sdcard/out.yuv --stream-skip=9 --stream-count=1
m-mmap=3 --stream-to=/sdcard/out.yuv --stream-skip=9 --stream-count=1 <
<<<<<<<<< 7.51 fps
<
【看到<<<<<<<<< 7.51 fps 说明成功】
参数说明
-d: 摄像头对应设备文件
--set-fmt-video:指定了宽高及pxielformat(用FourCC表示)。NV12即用FourCC表示的pixelformat
--stream-mmap:指定buffer的类型为mmap,即由kernel分配的物理连续的或经过iommu映射的buffer
--stream-to:指定帧数据保存的文件路径
--stream-skip:指定丢弃(不保存到文件)前3帧
--stream-count:指定抓取的帧数,不包括--stream-skip丢弃的数量
其他参数
--set-selection,指定对输入图像进行裁剪。特别是当RKISP1的前级大小发生变化时要保证selection不大于前级输出大小。RKCIF的裁剪则是通过--set-crop参数设置的
--stream-poll,该选项指示v4l2-ctl采用异步IO,即在dqbuf前先用select等等帧数据完成,从而保证dqbuf不阻塞。否则dqbuf将会阻塞直到有数据帧到来
2. 显示图片:
将文件/sdcard/out.yuv从板子通过adb pull命令拷贝出来,
运行于windows下:
adb pull /sdcard/out.yuv
再拷贝到ubuntu中,执行以下命令显示图片【用其他可以打开yuv格式图片的工具也可以】
ffplay out.yuv -f rawvideo -pixel_format nv12 -video_size 800x600
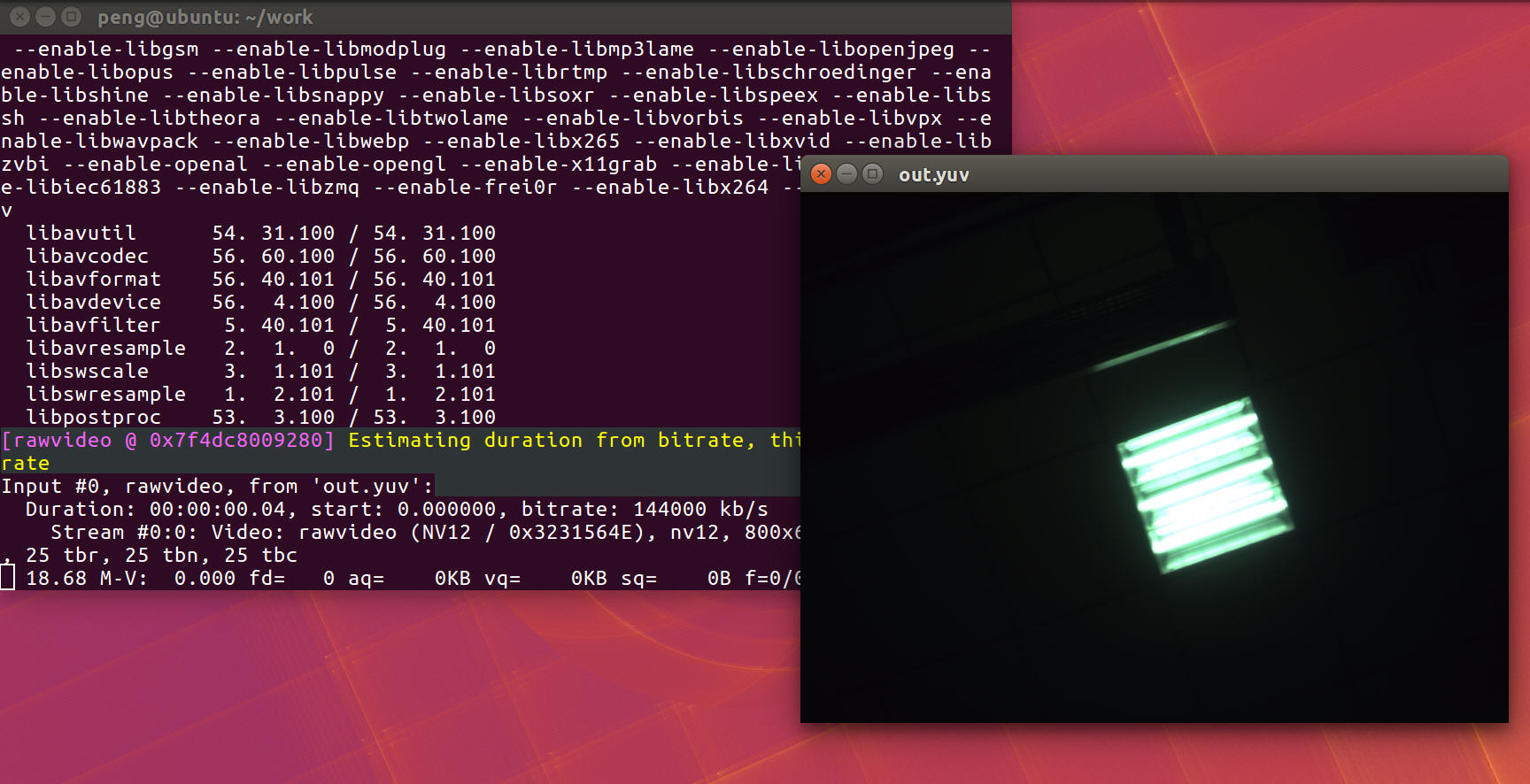
【拍照时选择其他较高分辨率会出错,暂时还没解决这个问题,有知道的可以联系我:yikoupeng】
四、参数设置
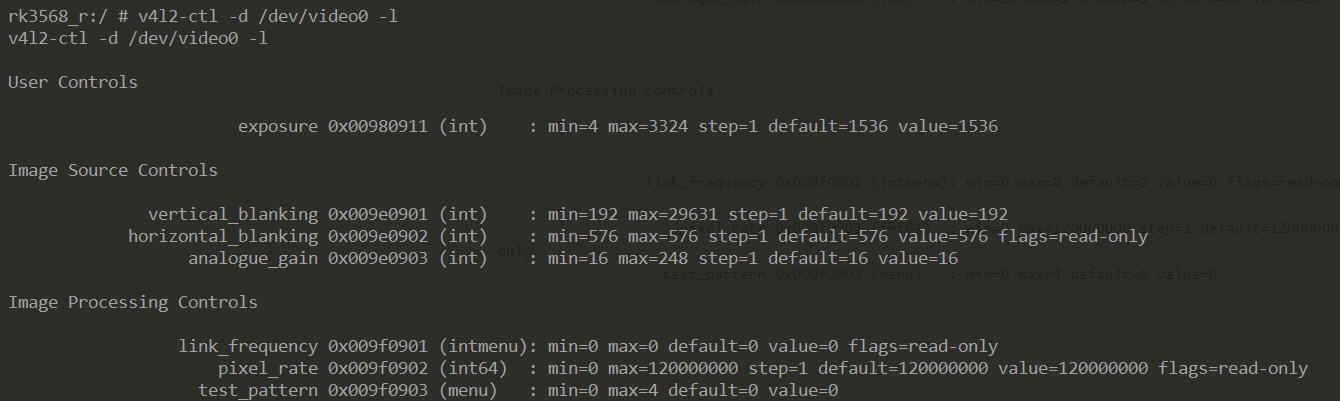
1. 显示摄像头参数
显示摄像头参数
rk3568_r:/ # v4l2-ctl -d /dev/video0 -l
v4l2-ctl -d /dev/video0 -l
User Controls
exposure 0x00980911 (int) : min=4 max=3324 step=1 default=1536 value=1536
Image Source Controls
vertical_blanking 0x009e0901 (int) : min=192 max=29631 step=1 default=192 value=192
horizontal_blanking 0x009e0902 (int) : min=576 max=576 step=1 default=576 value=576 flags=read-only
analogue_gain 0x009e0903 (int) : min=16 max=248 step=1 default=16 value=16
Image Processing Controls
link_frequency 0x009f0901 (intmenu): min=0 max=0 default=0 value=0 flags=read-only
pixel_rate 0x009f0902 (int64) : min=0 max=120000000 step=1 default=120000000 value=120000000 flags=read-only
test_pattern 0x009f0903 (menu) : min=0 max=4 default=0 value=0
2. 增加曝光exposure
exposure值区间为: 4-3324
命令实例:
v4l2-ctl -d /dev/video0 --set-ctrl exposure=3324
3. 增加图片亮度analogue_gain
analogue_gain用于设置显示的图像的亮度
analogue_gain值区间:16-248
命令实例:
v4l2-ctl -d /dev/video0 --set-ctrl analogue_gain=240
analogue_gain=16现象
analogue_gain=244现象【效果非常明显】
4. 测试显示信息test_pattern
参数test_pattern,可以用于测试显示图像
- 0:摄像头
- 1-3 测试图片
命令实例:
v4l2-ctl -d /dev/video0 --set-ctrl test_pattern=0
test_pattern = 1
test_pattern = 2
test_pattern = 3
5. 修改Entity的format、size
举例一,GC2053摄像头支持多个分辨率的输出,默认为1920x1080。现将输出分辨率改为640x480:
media-ctl -d/dev/media0 --set-v4l2' "m00_b_ov13850 4-0010":0[fmt:SBGGR10//640x480]'
修改GC2053输出后,rkisp-isp-subdev的大小及video device crop也相应要修改。因为后级的大小不能大于前级的大小。
~/>$ media-ctl -d/dev/media0 --set-v4l2 ' "rkisp-isp-subdev":0[fmt:SBGGR10/640x480]'
~/>$ media-ctl -d/dev/media0 --set-v4l2 ' "rkisp-isp-subdev":0[crop: (0, 0)/640x480]'
~/>$ media-ctl -d/dev/media0 --set-v4l2 ' "rkisp-isp-subdev":2[crop: (0, 0)/640x480]'
~/>$ v4l2-ctl -d/dev/video0\
--set-selection=target=crop, top=0, left=0, width=640, height=480
五、遇到问题解决
1. 解决闪退
主要是camera3_profiles_rk356x.xml和camera3_profiles.xml这两个文件中没有ov13850的信息
所以找到这两个文件,增加相对应的摄像头信息
改文件位于sdk的目录如下:
hardware/rockchip/camera/etc/camera/
内容比较多,只贴出我修改那一段
【我将其他摄像头都删除了】
<Profiles cameraId="0" name="ov13850" moduleId="m00">
<Supported_hardware>
<hwType value="SUPPORTED_HW_RKISP1"/>
</Supported_hardware>
<Android_metadata> <!-- Android static metadata only -->
<!-- Color Correction -->
<colorCorrection.availableAberrationModes value="OFF"/>
<!-- Control -->
<control.availableModes value="OFF"/>
<control.aeAvailableAntibandingModes value="OFF,50HZ,60Hz,AUTO"/>
<control.aeAvailableModes value="ON,OFF"/>
<control.aeLockAvailable value="FALSE"/>
…………
<sensorType value="SENSOR_TYPE_RAW"/> <!-- SENSOR_TYPE_SOC or SENSOR_TYPE_RAW -->
文件camera3_profiles.xml参数的说明,瑞芯微官方有相应的说明文档
2. app 提示没有权限连接&打开设备失败
10-24 15:20:15.535 1668 1668 D CAM_Camera2OneCamMgr: Getting First BACK Camera
10-24 15:20:15.535 1668 1668 I CameraManagerGlobal: Connecting to camera service
10-24 15:20:15.539 346 346 W ServiceManager: Permission failure: android.permission.CAMERA_OPEN_CLOSE_LISTENER from uid=10090 pid=1668
10-24 15:20:15.542 1668 1668 D CAM_Camera2OneCamMgr: Getting First FRONT Camera
10-24 15:20:15.543 1668 1668 W CAM_Camera2OneCamMgr: No front-facing camera found,try to find external facing camera.
10-24 15:20:15.544 1668 1668 W CAM_Camera2OneCamMgr: No external camera found.
该log位于以下文件
./packages/apps/Camera2/src/com/android/camera/one/v2/Camera2OneCameraManagerImpl.java:172
修改文件
packages/apps/Camera2/AndroidManifest.xml
增加下面两处,会解决连接ManagerService 错误问题
<uses-permission android:name="android.permission.CAMERA_OPEN_CLOSE_LISTENER"/>
android:sharedUserId="android.uid.system"
同时将设备树文件
将mipi_in_ucam0里的reg修改为1,如果有其他摄像头信息,一次往后填写或者删除。
114 &csi2_dphy0 {
115 status = "okay";
116
117 ports {
118 #address-cells = <1>;
119 #size-cells = <0>;
120 port@0 {
121 reg = <0>;
122 #address-cells = <1>;
123 #size-cells = <0>;
124
125 mipi_in_ucam0: endpoint@1 {
126 reg = <1>;
127 remote-endpoint = <&ov13850_out>;
128 data-lanes = <1 2 3 4>;
129 };
……
【这个reg是什么意思,有知道的老铁可以给我留言】
3. APP打开设备失败
从log看,没有任何permission问题,摄像头也打开了,但是就是连接失败,主要是xml文件的sensorType 设置不对
hardware/rockchip/camera/etc/camera/camera3_profiles_rk356x.xml
hardware/rockchip/camera/etc/camera/camera3_profiles.xml
找到这两个文件下面的值
<sensorType value="SENSOR_TYPE_RAW"/> <!-- SENSOR_TYPE_SOC or SENSOR_TYPE_RAW -->
修改为
<sensorType value="SENSOR_TYPE_SOC"/> <!-- SENSOR_TYPE_SOC or SENSOR_TYPE_RAW -->
六、后续
后面还有一些工作需要进一步研究:
- 目前只调通了1个摄像头,后需要会再增加1个2lane的摄像头
- 视频颜色还有点发绿,还需要进一步调试
有一起玩瑞芯微平台的老铁,后台猛戳我
标签:10,--,dev,瑞芯微,camera,ov13850,摄像头 From: https://www.cnblogs.com/kn-zheng/p/17150791.html