Ubuntu16.04安装ROS Kinetic详细过程 - 古月居 (guyuehome.com)
Ubuntu16.04安装ROS Kinetic详细过程
-
- 1、设置sources.list
- 2、设置key(公钥已更新)
- 3、更新package
- 4、安装ROS kinetic完整版
- 5、初始化rosdep
- 6、配置ROS环境
- 7、安装依赖项
- 8、测试ROS是否安装成功
1、设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'2、设置key(公钥已更新)
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3、更新package
sudo apt-get update4、安装ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full5、初始化rosdep
注意:在使用ROS之前需要初始化rosdep
sudo rosdep initrosdep update6、配置ROS环境
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc7、安装依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential8、测试ROS是否安装成功
(1)、CTRL+ALT+T打开终端(Termial),输入以下命令,初始化ROS环境:
roscore成功打开如下图所示:
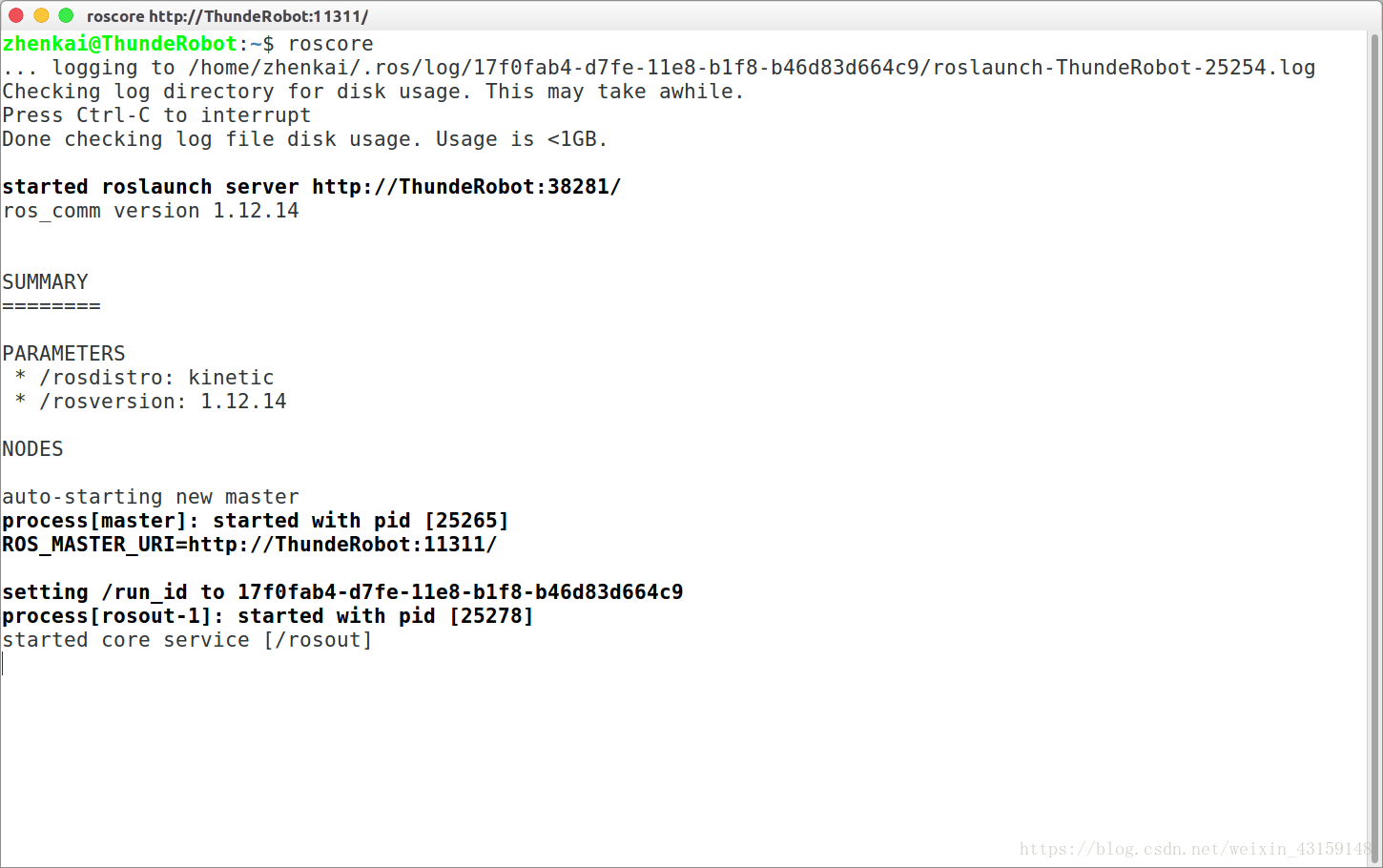
上面显示有ROS的版本,还有一些节点、端号等内容。
(2)、再 打开一个新的终端(Termial),输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node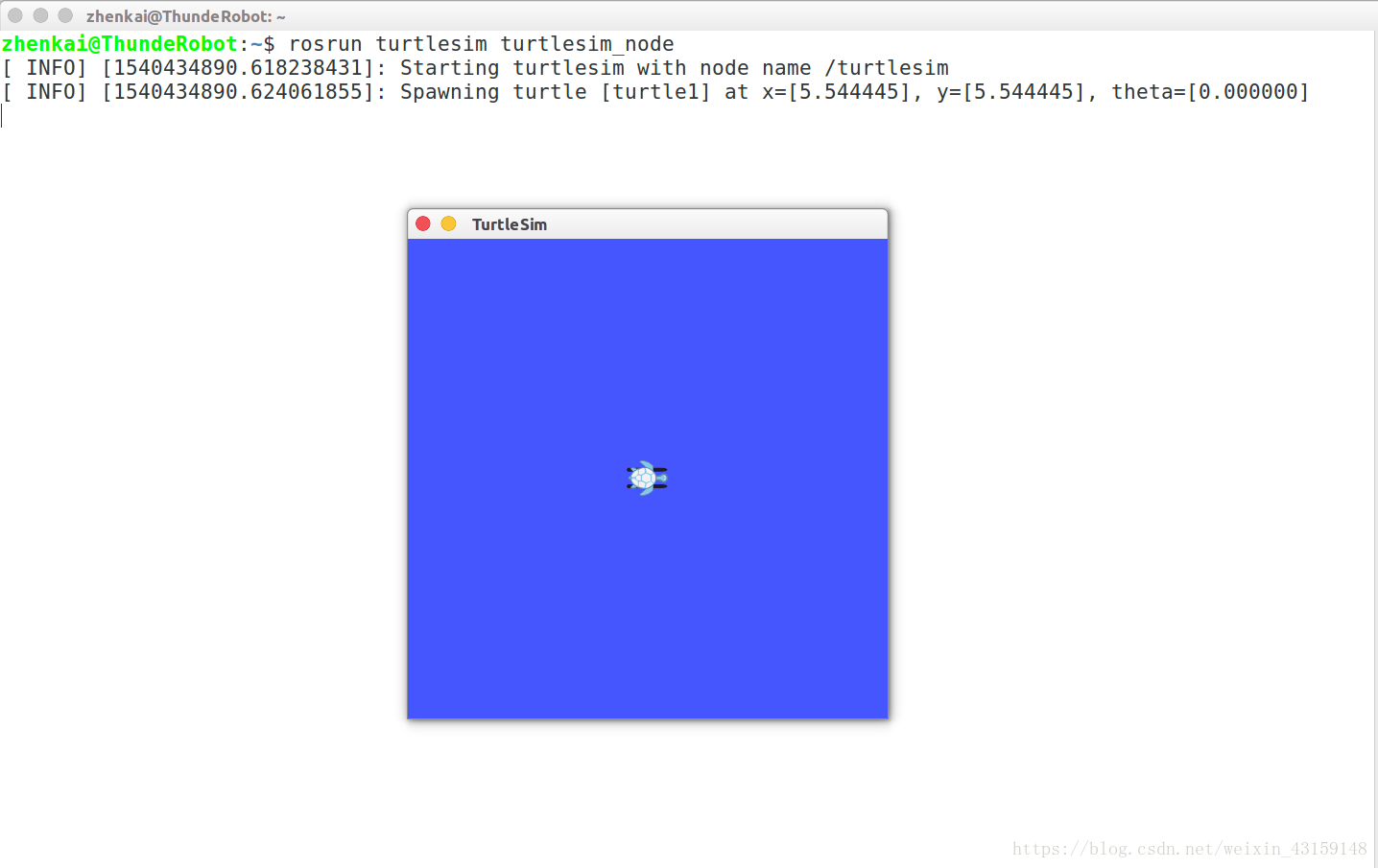
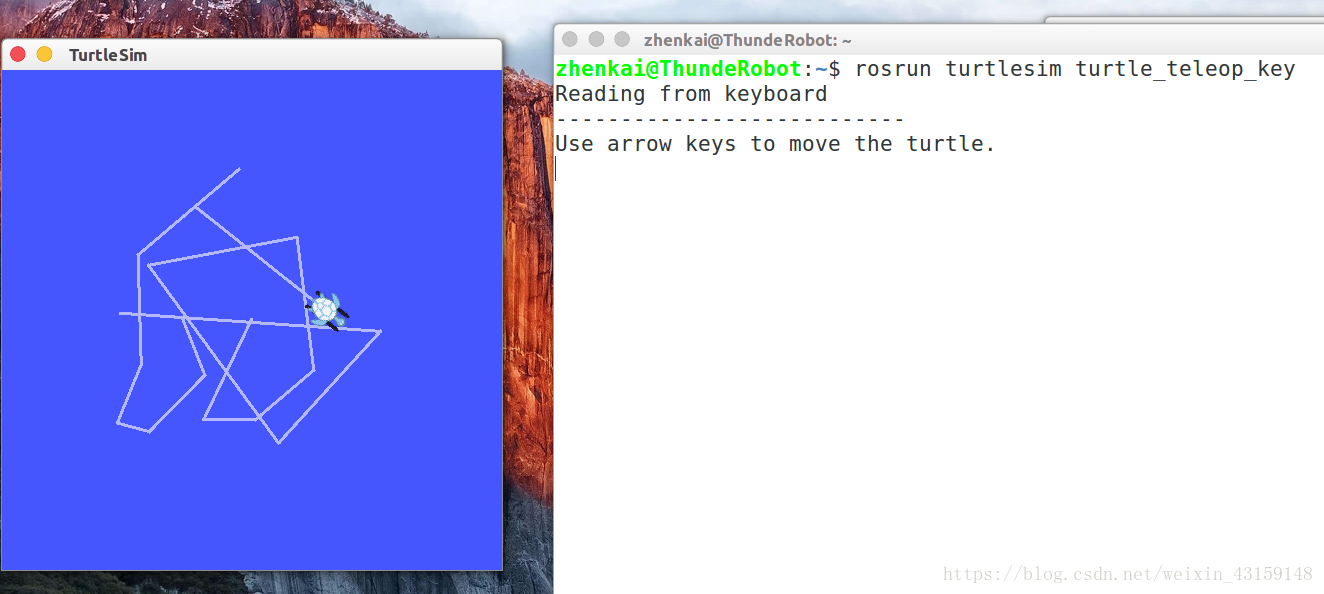
(3)、出现一个小乌龟的LOGO后,再 打开一个新的终端(Termial),输入以下命令
rosrun turtlesim turtle_teleop_key
然后,通过方向键控制小乌龟的移动:如下图所示
(4)、 打开新的Termial,输入以下命令,可以查看ROS节点信息:
rosrun rqt_graph rqt_graph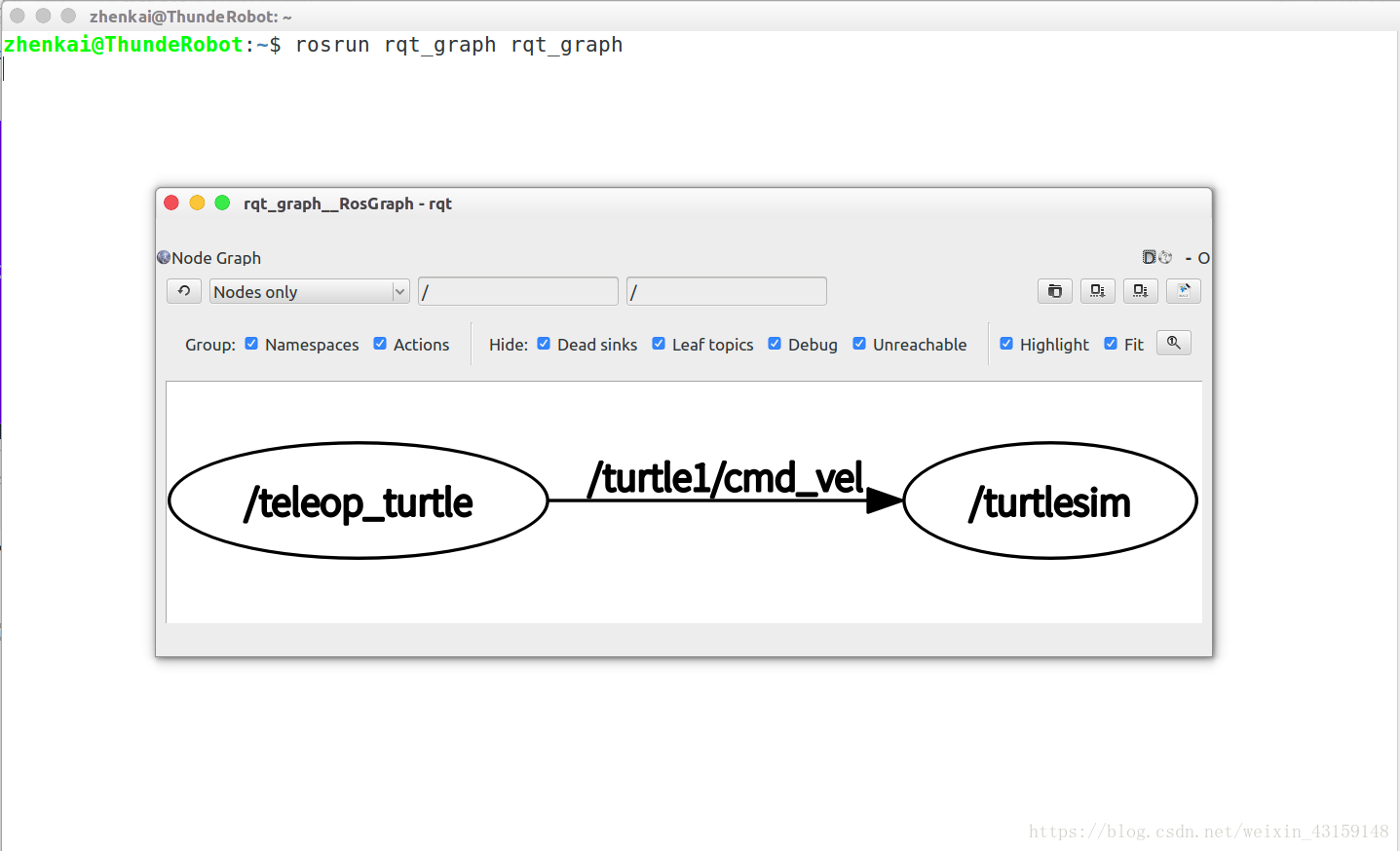
如果你能顺利进行到这一步,说明ROS安装成功了。
如果大家在安装的过程中出现问题或者错误(ERROR),可以给我留言,大家可以相互交流一些。