You are given an undirected graph (the "original graph") with n nodes labeled from 0 to n - 1. You decide to subdivide each edge in the graph into a chain of nodes, with the number of new nodes varying between each edge.
The graph is given as a 2D array of edges where edges[i] = [ui, vi, cnti] indicates that there is an edge between nodes ui and vi in the original graph, and cnti is the total number of new nodes that you will subdivide the edge into. Note that cnti == 0 means you will not subdivide the edge.
To subdivide the edge [ui, vi], replace it with (cnti + 1) new edges and cnti new nodes. The new nodes are x1, x2, ..., xcnti, and the new edges are [ui, x1], [x1, x2], [x2, x3], ..., [xcnti-1, xcnti], [xcnti, vi].
In this new graph, you want to know how many nodes are reachable from the node 0, where a node is reachable if the distance is maxMoves or less.
Given the original graph and maxMoves, return the number of nodes that are reachable from node 0 in the new graph.
Example 1:
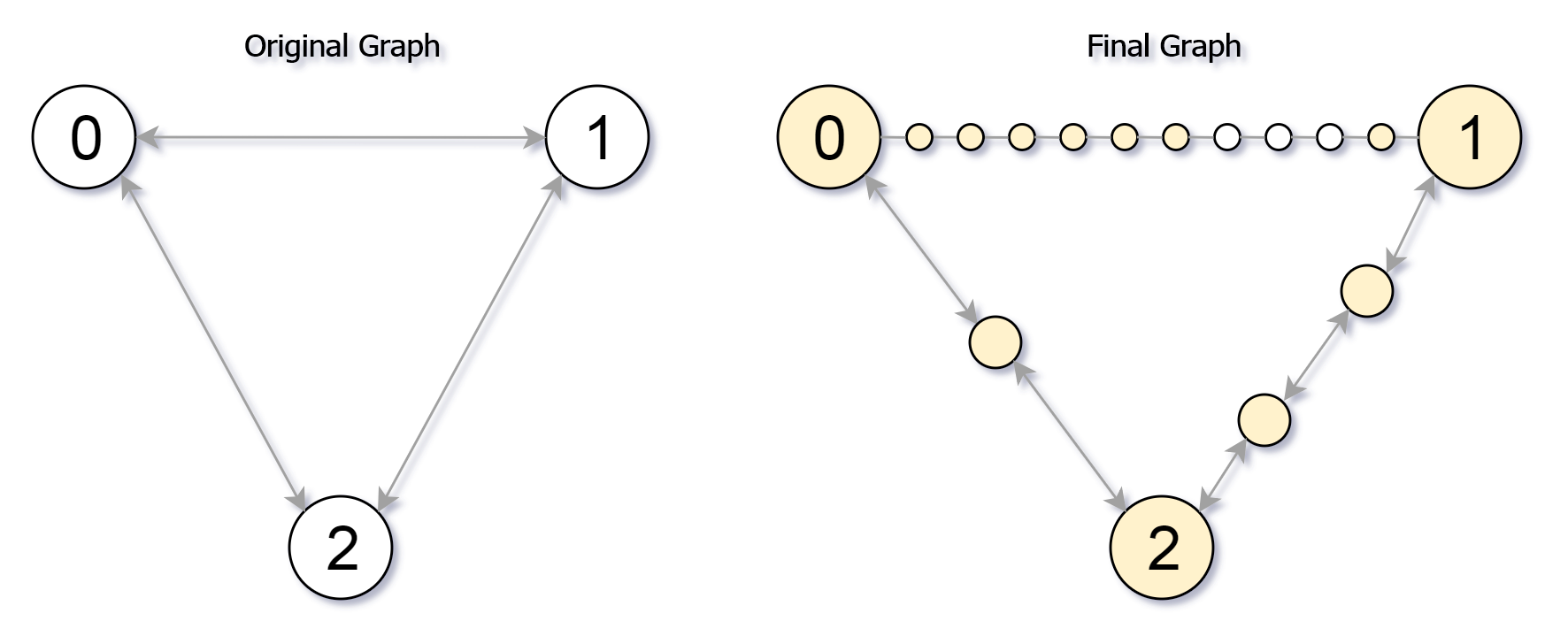
Input: edges = [[0,1,10],[0,2,1],[1,2,2]], maxMoves = 6, n = 3 Output: 13 Explanation: The edge subdivisions are shown in the image above. The nodes that are reachable are highlighted in yellow.
Example 2:
Input: edges = [[0,1,4],[1,2,6],[0,2,8],[1,3,1]], maxMoves = 10, n = 4 Output: 23
Example 3:
Input: edges = [[1,2,4],[1,4,5],[1,3,1],[2,3,4],[3,4,5]], maxMoves = 17, n = 5 Output: 1 Explanation: Node 0 is disconnected from the rest of the graph, so only node 0 is reachable.
Constraints:
0 <= edges.length <= min(n * (n - 1) / 2, 10^4)edges[i].length == 30 <= ui < vi < n- There are no multiple edges in the graph.
0 <= cnti <= 10^40 <= maxMoves <= 10^91 <= n <= 3000
Dijkstra generates a spanning tree, not necessarily MST
Solution
1. Build graph based on each edge's subdivide cnt, edge weight = subdivide cnt + 1.
2. Run dijkstra, compute shortest distance from node 0 to all nodes. Keep track all edges that lead to a node with edge sum <= maxMoves and save them in a Set S.
3. compute final results in 2 parts:
(a). add all original nodes whose shortest path from node 0 <= maxMoves;
(b) For newly added nodes, check each edge:
if an edge is in S, then all the newly added nodes on this edge should be added;
if an edge is not in S, then check its two nodes U and V. if dist[U] <= maxMoves, add the according newly added nodes that are reachable from U. Do the same from V. Be careful to not add the same nodes twice!
class Solution {
public int reachableNodes(int[][] edges, int maxMoves, int n) {
int m = edges.length;
List<int[]>[] g = buildGraph(edges, n);
int[] d = new int[n];
Arrays.fill(d, Integer.MAX_VALUE);
d[0] = 0;
PriorityQueue<int[]> q = new PriorityQueue<>(Comparator.comparingInt(e->e[1]));
boolean[] processed = new boolean[n];
q.add(new int[]{0, 0, -1});
Set<Integer> included = new HashSet<>();
while(!q.isEmpty()) {
int[] curr = q.poll();
if(processed[curr[0]]) continue;
processed[curr[0]] = true;
if(curr[1] <= maxMoves) {
included.add(curr[2]);
}
for(int[] next : g[curr[0]]) {
if(d[curr[0]] + next[1] < d[next[0]]) {
d[next[0]] = d[curr[0]] + next[1];
q.add(new int[]{next[0], d[next[0]], next[2]});
}
}
}
int ans = 0;
for(int i = 0; i < n; i++) {
if(d[i] <= maxMoves) {
ans++;
}
}
for(int i = 0; i < m; i++) {
if(included.contains(i)) {
ans += edges[i][2];
}
else {
int cnt = 0;
if(d[edges[i][0]] < maxMoves) {
cnt += Math.min(edges[i][2], maxMoves - d[edges[i][0]]);
}
if(d[edges[i][1]] < maxMoves) {
cnt += Math.min(edges[i][2], maxMoves - d[edges[i][1]]);
}
ans += Math.min(cnt, edges[i][2]);
}
}
return ans;
}
private List<int[]>[] buildGraph(int[][] edges, int n) {
List<int[]>[] g = new List[n];
for(int i = 0; i < n; i++) {
g[i] = new ArrayList<>();
}
for(int i = 0; i < edges.length; i++) {
g[edges[i][0]].add(new int[]{edges[i][1], edges[i][2] + 1, i});
g[edges[i][1]].add(new int[]{edges[i][0], edges[i][2] + 1, i});
}
return g;
}
}
标签:882,Subdivided,int,Graph,edge,edges,graph,new,nodes From: https://www.cnblogs.com/lz87/p/17139602.html