clear; close all; clc;
%% 参数设定
% 光学参数
lambda = 632.8e-9; % 波长 (单位:米)
w0 = 1e-3; % 光束腰半径 (单位:米)
z = 10; % 传播距离 (单位:米)
% 模式阶数
m = 3; % x 方向的模式阶数
n = 1; % y 方向的模式阶数
% 计算相关参数
k = 2 * pi / lambda; % 波数
zR = pi * w0^2 / lambda; % 瑞利长度
w = w0 * sqrt(1 + (z / zR)^2); % 光束半径
R = z * (1 + (zR / z)^2); % 波前曲率半径
psi = atan(z / zR); % 光束相位
% 空间坐标
num_points = 500; % 网格点数
x = linspace(-5 * w0, 5 * w0, num_points);
y = linspace(-5 * w0, 5 * w0, num_points);
[X, Y] = meshgrid(x, y);
% 归一化坐标
x_norm = sqrt(2) * X / w;
y_norm = sqrt(2) * Y / w;
%% 计算厄米多项式
Hm = HermitePoly(m, x_norm);
Hn = HermitePoly(n, y_norm);
%% 计算电场分布
E = (w0 / w) .* Hm .* Hn .* ...
exp(-(X.^2 + Y.^2) / w^2) .* ...
exp(-1i * (k * z + (m + n + 1) * psi - k * (X.^2 + Y.^2) / (2 * R)));
%% 计算光强分布
I = abs(E).^2;
%% 计算基模光强分布
E0 = (w0 / w) .* exp(-(X.^2 + Y.^2) / w^2);
I0 = abs(E0).^2;
%% 绘制二维光强分布
figure('Name', '二维光强分布', 'NumberTitle', 'off');
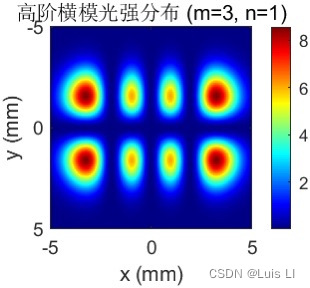
% 高阶横模光强分布
subplot(1,2,1);
imagesc(x * 1e3, y * 1e3, I);
xlabel('x (mm)');
ylabel('y (mm)');
title(['高阶横模光强分布 (m=', num2str(m), ', n=', num2str(n), ')']);
axis equal tight;
colorbar;
colormap jet;
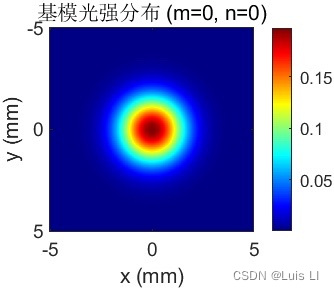
% 基模光强分布
subplot(1,2,2);
imagesc(x * 1e3, y * 1e3, I0);
xlabel('x (mm)');
ylabel('y (mm)');
title('基模光强分布 (m=0, n=0)');
axis equal tight;
colorbar;
colormap jet;
%% 绘制三维光强分布
figure('Name', '三维光强分布', 'NumberTitle', 'off');
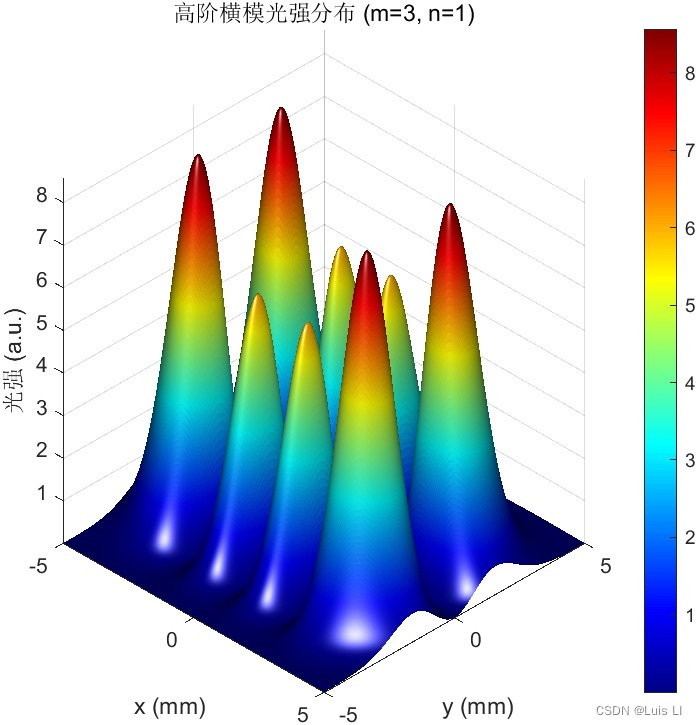
% 高阶横模三维图
subplot(1,2,1);
surf(x * 1e3, y * 1e3, I, 'EdgeColor', 'none');
xlabel('x (mm)');
ylabel('y (mm)');
zlabel('光强 (a.u.)');
title(['高阶横模光强分布 (m=', num2str(m), ', n=', num2str(n), ')']);
axis tight;
view(45, 30);
colorbar;
colormap jet;
lighting phong;
camlight headlight;
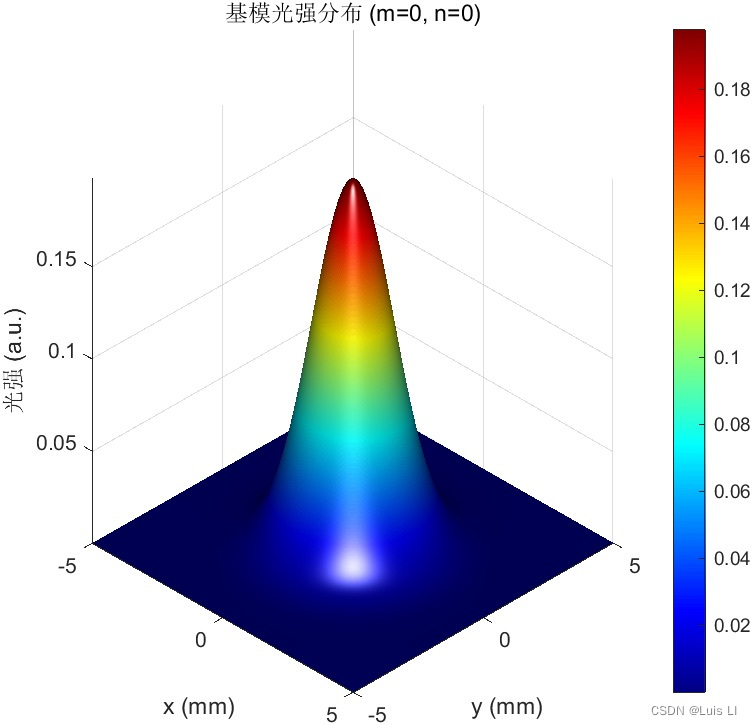
% 基模三维图
subplot(1,2,2);
surf(x * 1e3, y * 1e3, I0, 'EdgeColor', 'none');
xlabel('x (mm)');
ylabel('y (mm)');
zlabel('光强 (a.u.)');
title('基模光强分布 (m=0, n=0)');
axis tight;
view(45, 30);
colorbar;
colormap jet;
lighting phong;
camlight headlight;
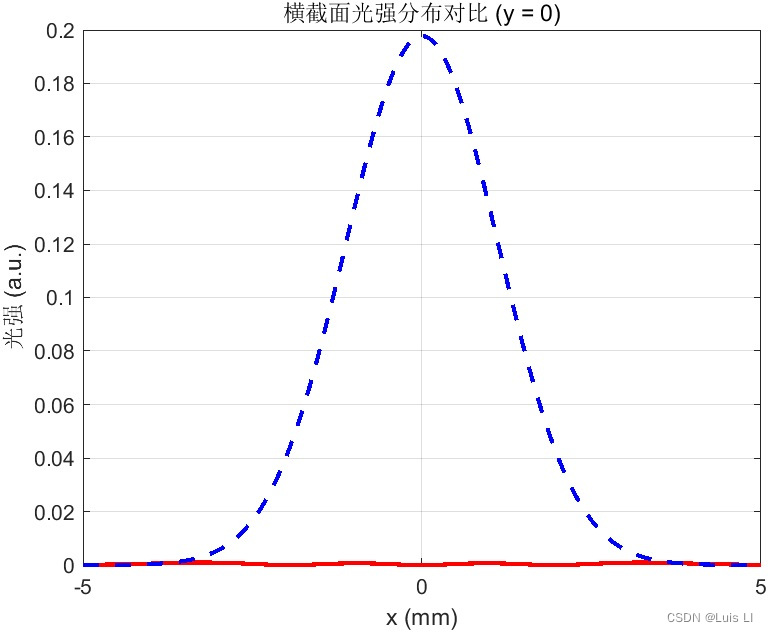
%% 绘制横截面光强分布对比
figure('Name', '横截面光强对比', 'NumberTitle', 'off');
% 选择y=0的横截面
y_index = find(abs(y) == min(abs(y)));
plot(x * 1e3, I(y_index, :), 'r', 'LineWidth', 2);
hold on;
plot(x * 1e3, I0(y_index, :), 'b--', 'LineWidth', 2);
xlabel('x (mm)');
ylabel('光强 (a.u.)');
title('横截面光强分布对比 (y = 0)');
legend(['高阶横模 (m=', num2str(m), ', n=', num2str(n), ')'], '基模 (m=0, n=0)');
grid on;
hold off;
%% 厄米多项式函数定义
function Hn = HermitePoly(n, x)
% HermitePoly 计算厄米多项式 H_n(x)
% 输入:
% n - 多项式阶数
% x - 变量,可以是标量或向量
% 输出:
% Hn - H_n(x)
if n == 0
Hn = ones(size(x));
elseif n == 1
Hn = 2 .* x;
else
Hn_minus_two = ones(size(x)); % H_0(x)
Hn_minus_one = 2 .* x; % H_1(x)
for k = 2:n
Hn = 2 .* x .* Hn_minus_one - 2 * (k - 1) .* Hn_minus_two;
Hn_minus_two = Hn_minus_one;
Hn_minus_one = Hn;
end
end
end
通过调整m、n的数值可以获得高阶和低阶的对比视图
高斯光束光强度测量方案
刀口法(Knife-Edge Method)是一种常用的高斯光束束腰光斑尺寸测量方法,特别适用于光束光斑的径向尺寸测量。其基本原理是通过逐步移动一个锐利的刀口,在光束传播方向上截断部分光束,记录光强变化,根据高斯光束的强度分布特性,计算出光束的束腰光斑尺寸。
下面是使用刀口法进行光束束腰尺寸测量的详细实验步骤:
刀口法实验步骤
1. 实验设备准备
- 光源:高斯光束光源(如激光器)。
- 光束探测器:例如光电探测器、光束分析仪、光电二极管或光电摄像机。
- 刀口:一个锋利的刀片(如不锈钢刀片),其边缘要足够细且锋利,确保光束能够精确地被截断。
- 光学支架:用于固定和调整光源、探测器、刀口等设备的位置。
- 光学元件:例如透镜、准直器(确保激光束为准直光束)。
- 定位装置:用于精确移动刀口,通常可以使用精密电动滑台或手动调整装置。
2. 设置光束路径
-
光源对准:
- 确保激光器或其他光源发出的光束是准直的,以确保光束保持相对稳定且一致的强度分布。
- 可通过准直透镜将光源的发散光束准直成平行光束。
-
刀口定位:
- 将刀口垂直于光束传播方向固定在光束路径上。
- 初始位置选择在距离束腰一定距离的地方,通常可以先让刀口从光束的外侧开始扫描。
-
探测器定位:
- 将光电探测器放置在光束传播的路径上,并确保其能够测量到光束的强度。
- 探测器的位置应在刀口的前后,能够记录刀口移动过程中,截取不同部分光束的强度变化。
3. 刀口扫描过程
-
刀口扫描:
- 以小步长精确移动刀口,从光束中心开始,沿着光束传播方向逐渐移动,确保刀口能逐步截取光束的不同部分。
- 刀口的移动方向应垂直于光束的传播方向。
- 每个位置记录下探测器测量的光强值。
-
光强记录:
- 当刀口逐渐从光束外侧移向中心时,光强会随刀口位置变化而发生变化。初始时刀口处的光束完全被遮挡,探测器记录到的光强为零。
- 随着刀口逐渐切入光束中部,光强逐渐增加,当刀口完全穿过光束时,探测器记录到最大光强。
4. 数据处理
-
数据拟合:
- 将记录下来的光强与刀口位置的关系绘制成曲线图。通常,光强会随着刀口进入光束中心而逐渐增加,然后在完全通过光束时达到峰值。
- 使用高斯分布模型对光强数据进行拟合:
其中,I0是光强的最大值,w是束腰光斑半径。
-
束腰计算:
- 根据拟合的高斯分布曲线,估算光束的束腰半径 w0w_0。
- 通过光强分布的变化(即光束在刀口位置的变化)推算出束腰光斑尺寸。
通常,刀口法根据以下公式来估算束腰半径:

其中,w是在刀口的中点位置测量得到的光斑半径。
5. 结果分析
- 光束对称性验证:
- 检查光束是否对称,理想的高斯光束应具有完全的对称性,因此光强的变化应为单峰对称分布。
- 误差分析:
- 检查实验过程中可能的误差来源,如刀口的锐利程度、探测器的响应灵敏度等。
- 对比实验数据与理论结果,检查误差是否在可接受范围内。
6. 实验注意事项
-
刀口的精确性:
- 刀口的锐利程度和精确度非常关键,粗糙的刀口可能导致测量结果不准确。建议使用高精度的尖锐刀片,避免边缘变钝。
-
刀口的稳定性:
- 刀口的移动应非常平稳,避免振动和跳动,否则会影响光强测量的准确性。
-
环境稳定性:
- 光束的稳定性受环境因素(如温度、空气流动、震动等)的影响较大。确保实验环境稳定,避免外部干扰。
-
光源的稳定性:
- 激光器的输出功率应保持稳定,否则可能会影响测量精度。
7. 结论
刀口法是一种简便而有效的测量高斯光束束腰光斑尺寸的方法,能够提供较高的精度。通过精确扫描光束并记录光强随刀口位置变化的数据,可以推算出光束的光斑尺寸(束腰半径)。在实验过程中,设备的精度、刀口的锋利度以及稳定的实验环境是确保准确结果的关键。
标签:刀口,光强,高斯,光束,测量,束腰,1e3,Hn From: https://blog.csdn.net/2301_81174869/article/details/144218866