来源:晓飞的算法工程笔记 公众号,转载请注明出处
论文: Exploring the Benefit of Activation Sparsity in Pre-training
创新点
- 研究了激活属性在预训练过程中的变化,发现
Transformer在大多数预训练过程中表现出稀疏激活,同时激活相关性随着训练的进行而不断演变。 - 提出了可切换的稀疏-密集学习(
Switchable Sparse-Dense Learning,SSD),在预训练过程中自适应地在基于专家混合(Mixtures-of-Experts,MoE)稀疏训练和传统的密集训练之间切换,充分利用稀疏训练的效率,避免了稀疏训练的静态激活相关性。 - 与密集训练相比,
SSD在相同模型规模下实现了可比的性能,并降低了预训练成本。 - 使用
SSD训练的模型可以直接作为MoE模型用于稀疏推理,并且在推理速度上可实现与密集模型相同的性能,速度提升可达 2× 。
内容概述
预训练的Transformer本质上具有稀疏激活的特征,即每个token只有一小部分神经元被激活。尽管稀疏激活在后训练(推理)方法中得到了探索,但其在预训练中的潜力仍未被发掘。
论文研究了Transformer在预训练过程中的激活情况,发现模型在预训练的早期阶段变得稀疏激活,随后在这种稀疏状态中稳定下来。尽管这表明稀疏激活是一个普遍现象,但激活模式仍然是动态的:对于某个输入,被激活的神经元集合在不同的预训练阶段之间存在变化。因此,针对预训练的稀疏训练方法应该适应激活模式的变化。
基于这些观察,论文提出了可切换稀疏-密集学习(Switchable Sparse-Dense Learning,SSD),利用稀疏激活现象加速Transformer的预训练,并提高推理效率。
SSD包含两种训练阶段:
- 原始的密集训练,有助于激活模式的演变。
- 稀疏训练,旨在在激活模式稳定之后有效优化模型参数。
在整个预训练过程中,SSD在这两个阶段之间切换。具体而言,当激活稀疏性增加并且激活模式变得稳定时,通过将密集模型转换为稀疏激活专家混合模型(Sparsely-activated Mixture-of-Experts,SMoE)来切换到稀疏训练,从而有效近似原始密集模型。此外,最终的密集模型熟悉稀疏计算形式,这对后续的稀疏推理是有利的。
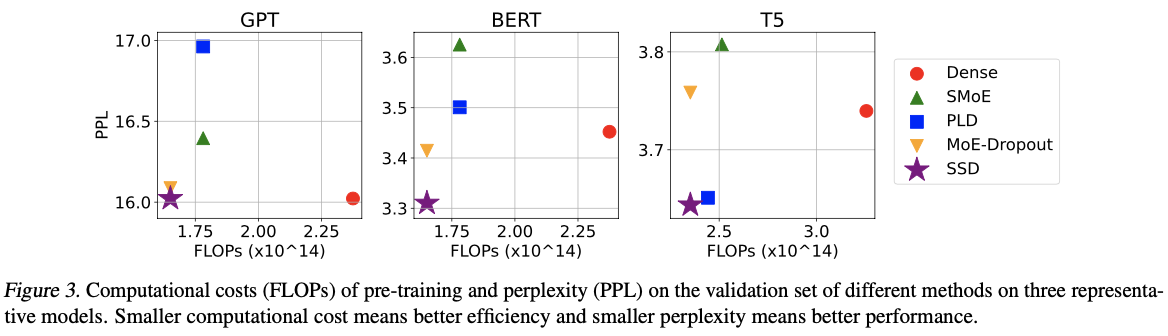
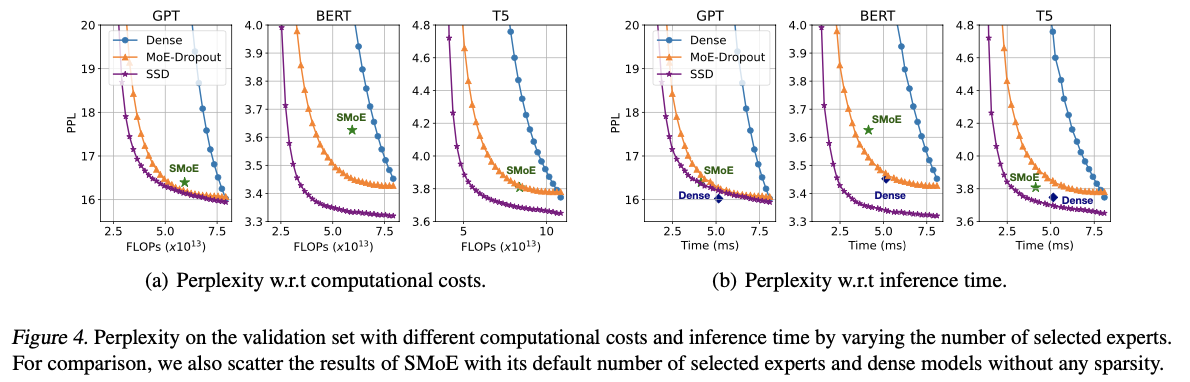
与传统的密集训练相比,SSD在相同模型大小和更少的预训练成本下实现了可比的性能,在FLOPs上实现了高达 1.44× 的加速。此外,使用SSD预训练的模型可以作为SMoE模型进行推理,而无需任何额外训练,同时将前馈网络的推理时间减少了高达 2× ,且性能与密集预训练模型相当。
SSD
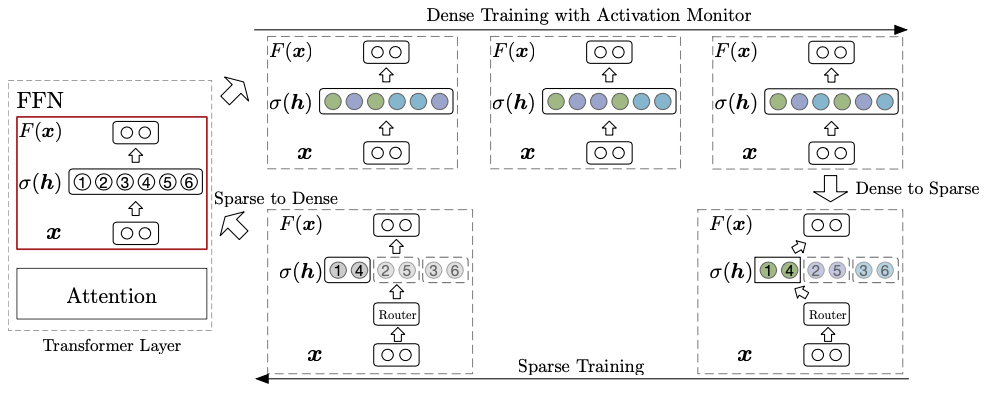
SSD专注于加速Transformer中的前馈网络(通常占总计算量的60%以上),通过在预训练阶段切换稀疏和密集模式实现加速。
- 在稀疏计算下,模型被转换为
SMoE模型,相较于其原始形式,计算成本更低。稀疏激活使得SMoE模型能够模拟原始模型,从而在效率和效果之间取得平衡。 - 在密集计算期间,所有模型参数都被计算和优化,以实现更好的性能。
最终模型恢复为密集配置,以充分利用模型容量。此外,最终模型也适配稀疏计算,可以直接用于高效的稀疏推理,而无需任何额外的训练。
在密集计算中,前馈网络(FFNs)通过以下方式计算:
FFN(x)=Woσ(Wix+bi)+bo,在稀疏计算中,前馈网络(FFNs)被均分为 N 个专家,并以SMoE的方式进行计算,
FFNSMoE(x)=N∑n=1αnWo,nσ(Wi,nx),使用门控网络来评估每个专家对于给定输入 x 的重要性,选择重要性分数最高的 K 个专家来计算输出。未被选择的专家的 αn 被设置为 0 。
密集转换为稀疏
-
神经元聚类
使用平衡的k-means聚类将 Wi 的行(每一行代表一个特定神经元)聚类成 N 组,假定具有相似权重的神经元更可能被同时激活。
基于聚类结果 s∈Rdff ,其中包含每个神经元的相应专家索引,将权重矩阵 Wi,Wo 分割为 N 个子矩阵 Wi,n,Wo,n 。
为了使转换更平滑,使用前一个checkkpoint的聚类中心作为当前checkkpoint聚类的初始化。这个简单的策略通常提供更好的结果,小于随机初始化中心的簇内平方和(WCSS)。
为了避免局部最优(特别是训练早期),进行两次聚类,一次使用随机初始化,另一次使用来自前一个checkkpoint的初始化,并选择更好的结果。形式上,第 j 次checkkpoint的聚类结果 sj 由以下公式计算:
sj=mins∈{f(Wi),f(Wi,sj−1)}WCSS(Wi,s),其中 f(Wi) 和 f(Wi,sj−1) 分别是使用随机初始化和来自前一个checkkpoint的初始化的聚类结果。
-
专家选择
使用输入 x 与聚类中心之间的相似性作为重要性评分,以选择前 K 个专家。形式上,第 n 个专家的重要性评分由以下公式计算:
αn=x⊤cn,cn=NdffdffN∑m=1Wmi,n,其中 Wmi,n 是 Wi,n 的第 m 行,而 cn 是第 n 个专家的聚类中心。
-
转换时机
通过监控激活模式的变化以确定过渡时间,其中激活模式的相似性反映了激活模式的变化速率,当激活稀疏度较高且激活模式稳定时进行转换。
具体而言,设定一个阈值 τ ,当两个连续checkkpoint之间的激活模式相似性大于 τ 时切换到稀疏训练。
稀疏转换为密集
SMoE模型的性能往往落后于具有相同参数的稠密模型,为了最优地利用模型容量并避免稀疏计算形式的过拟合,在训练期间战略性地多次回归到稠密训练。
当 K=N 时,SMoE计算与稠密计算是一致的,因此过渡到稠密计算是平滑的。通过连接所有专家的权重矩阵来进行此转换,从而获得稠密权重矩阵,同时忽略门控网络。
这个过渡使得全参数优化成为可能,有效缓解了稀疏训练引起的表示崩溃问题,并促进了激活模式的演变。
-
转换时机
为了实现可控的速度比率,建议保持稀疏训练步骤与所有训练步骤之间的常数比率 r 。此外,为了确保最终模型可以进行稠密使用,在训练结束时采用稠密训练。
主要实验
如果本文对你有帮助,麻烦点个赞或在看呗~
更多内容请关注 微信公众号【晓飞的算法工程笔记】
