大家好,我是痞子衡,是正经搞技术的痞子。今天痞子衡给大家分享的是JLink 7.62优化了手动增加新MCU型号支持方法。
JLink 工具可以说是搞单片机开发的必备神器,JLink 包括一个硬件仿真器(分不同用途的 EDU/BASE/PLUS/WIFI/ULTRA+/PRO)和 PC 机上的驱动软件(从有迹可循的 2006 年 V3.00 到如今的 V7.96,更新相当频繁)。除了硬件稳定备受好评之外,其驱动软件提供的功能非常丰富更是俘获了大批开发者芳心。痞子衡今天介绍的主题就是手动在 JLink 驱动里添加新 MCU 型号的方法:
- Note: JLink 驱动发布记录 https://www.segger.com/downloads/jlink/ReleaseNotes_JLink.html
一、回顾旧方法
当我们本地安装好了一个 JLink 驱动版本后,如果想要支持新的 MCU 型号(不在该版本支持列表里),通常有两种方法:一、安装一个支持该 MCU 型号的更新版本 JLink 驱动;二、从 MCU 厂商官网找到该 MCU 的 JLlink Patch 包,然后导入到当前 JLink 驱动路径下。如果再进一步,我们是希望更新驱动里已有 MCU 型号的下载算法支持,那就必须借助方法二。
痞子衡这里指的旧方法即是方法二,在当前 JLink 驱动里打 Patch 的方式,关于这个方式,痞子衡写过的如下三篇文章均有涉及。简单来说就是将 Patch 包里的文件以确定的目录结构导入到本地已安装好的驱动路径 \SEGGER\JLink_Vxxx\ 下。
《轻松设计更新Segger J-Link Flash下载算法文件》
《串行NOR Flash下载算法(J-Link工具篇)》
《超级下载算法RT-UFL v1.0发布,附J-Link下安装教程》
如果你一直是使用旧方法来新增 MCU 型号支持,你会发现其实这种打 Patch 的方式有一些痛点的:比如电脑上安装了多个 JLink 驱动,如果想让这些 JLink 驱动都支持该 MCU 型号,那就需要为每个驱动都打一遍 Patch,当我们的 Patch 累计得越来越多时,工作量也就越来越大。
二、迎接新方法
为了解决旧方法的痛点,从 JLink V7.62 开始,其换到了一种新的打 Patch 方式,我们可以在 V7.62 的 Release Note 里关于 DLL 的第 34 条更新里找到说明:
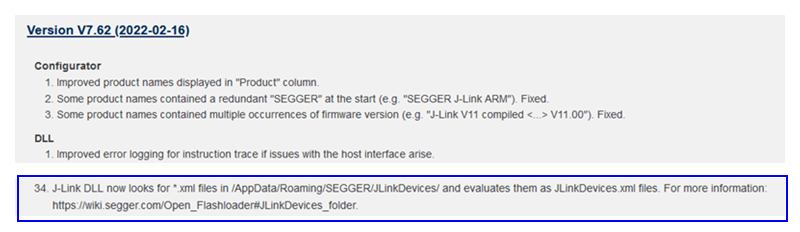
顺着那条说明,我们找到 https://wiki.segger.com/J-Link_Device_Support_Kit 里详细说明,新方法将 Patch 包里的文件换到了一个与具体 JLink 驱动安装目录无关的统一路径,以后只要在这个统一路径下打上 Patch,那么所有的 JLink 驱动均可以使用这个 Patch,省去了重复劳动。
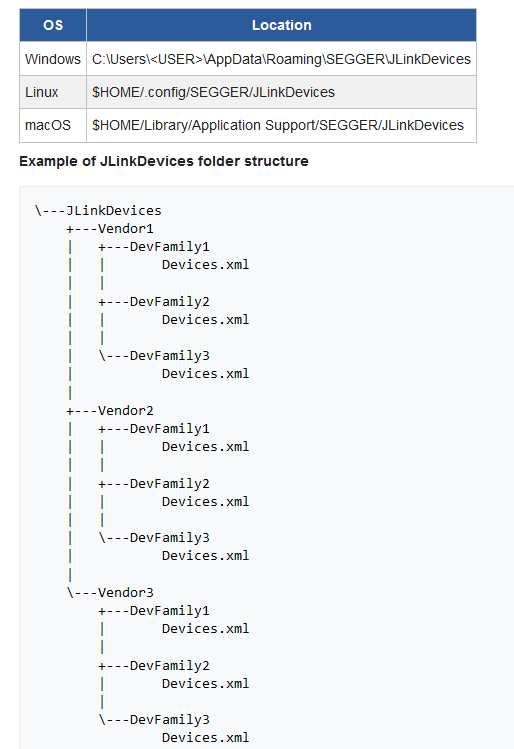
这里关于最重要的 .xml 文件,名字可以不用再像旧方法那样必须是 JLinkDevices.xml,可以是自定义名字的 *.xml 文件,而且这个文件位置也不用固定,最深支持 4 级目录,JLink DLL 会递归搜索找到最合适的 xml 文件来认定 Patch。
至此,JLink 7.62优化了手动增加新MCU型号支持方法痞子衡便介绍完毕了,掌声在哪里~~~
欢迎订阅
文章会同时发布到我的 博客园主页、CSDN主页、知乎主页、微信公众号 平台上。
微信搜索"痞子衡嵌入式"或者扫描下面二维码,就可以在手机上第一时间看了哦。
