1. 简介
- RK3588从入门到精通
- 本⽂主要介绍在Rockchip平台配置spi接口并且使用的方法
- 开发板:ArmSoM-W3
- Kernel:5.10.160
- OS:Debian11
2. SPI接口概述 SPI(Serial Peripheral Interface),即串行外围设备接口,是一种同步的,全双工的,多设备的,多主机的通信协议,用于连接外围设备,如ADC、DAC、数据存储器、定时器、接受器等。
2.1 spi接口的结构
<ignore_js_op>

- 主机:主机是SPI总线的控制者,它负责控制数据传输的方向和传输速度。
- 从机:从机是SPI总线的被控制者,它根据主机发出的指令,发出或接收数据。
- MOSI(Master Out Slave In):主机输出从机输入,用于传输从主机到从机的数据。
- MISO(Master In Slave Out):主机输入从机输出,用于传输从从机到主机的数据。
- CK(Serial Clock):时钟线,用于同步主机和从机之间的数据传输。
- CS(Chip Select):片选线,用于控制主机和从机之间的数据传输。
2.2 SPI接口的工作原理 在SPI接口通信过程中,主机发出一个片选信号,然后在时钟信号的控制下,主机发出一个字节的数据,从机接收到数据之后,也会发出一个字节的数据,主机接收到数据之后,发出一个片选信号,结束一次通信。 SPI接口有两种工作模式:主模式和从模式。主模式下,主机控制从机,从机接收主机发出的指令。从模式下,从机可以接收主机发出的指令,并向主机发送数据。
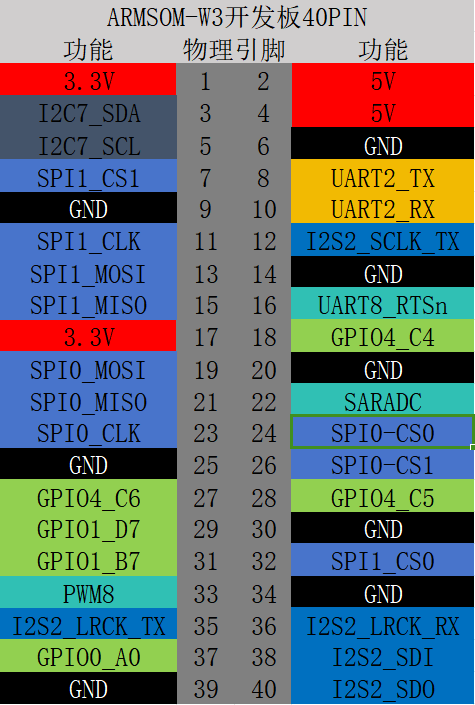
3.SPI硬件接口 RK3588旗舰芯片上可使用的spi接口有5组,ArmSoM SOM-3588-LGA核心板采用LGA 506引脚封装方式将spi资源全部引出,ArmSoM-W3开发板上40PIN引脚中有两组spi接口: <ignore_js_op>
4.spi设备配置 spi驱动相关代码路径:
-
drivers/spi/spi.c spi驱动框架 drivers/spi/spi-rockchip.c rk spi各接口实现 drivers/spi/spidev.c 创建spi设备节点,用户态使用。 drivers/spi/spi-rockchip-test.c spi测试驱动,需要自己手动添加到Makefile编译 Documentation/spi/spidev_test.c 用户态spi测试工具
4.1 配置 DTS 节点
-
&spi1 { status = "okay"; //assigned-clock-rates = <200000000>; //默认不用配置,SPI 设备工作时钟 max-freq = <48000000>; /* spi internal clk, don't modify */ //dma-names = "tx","rx"; //使能DMA模式 //rx-sample-delay-ns = <10>; //默认不用配置,读采样延时 spi_dev@0 { compatible = "rockchip,spidev"; reg = <0>; spi-max-frequency = <12000000>; spi-lsb-first; //IO 先传输 lsb }; };
- status:如果要启用 SPI,则设为 okay,如不启用,设为 disable。
- spi_dev@0:本例子使用 CS0,故此处设为 0,如果使用 CS1,则设为 1。
- compatible:这里的属性必须与驱动中的结构体:of_device_id 中的成员 compatible 保持一致。
- reg:此处与 spi_dev@0 保持一致,这里设为0。
- spi-max-frequency:此处设置 spi 使用的最高频率,ITX-3588J 最高支持 50000000。
这里使用的驱动是drivers/spi/spidev.c,驱动设备加载注册成功后,会出现类似这个名字的设备:/dev/spidev1.0。 一些常见的SPI驱动API接口: Linux SPI API:
- spi_register_driver():注册SPI设备驱动程序。
- spi_unregister_driver():注销SPI设备驱动程序。
- spi_setup():设置SPI总线和设备的参数。
- spi_sync():同步方式进行SPI数据传输。
- spi_message_init():初始化SPI消息结构。
- spi_message_add_tail():向SPI消息添加传输操作。
- spi_sync():同步方式进行SPI数据传输。
- spi_transfer():进行SPI数据传输。
- SPI_IOC_RD_MODE: 读取SPI设备的通信模式。
- SPI_IOC_WR_MODE: 设置SPI设备的通信模式。
- SPI_IOC_RD_MODE32: 读取SPI设备的32位通信模式。
- SPI_IOC_WR_MODE32: 设置SPI设备的32位通信模式。
- SPI_IOC_RD_LSB_FIRST: 读取SPI设备的LSB(Least Significant Bit)优先模式。
- SPI_IOC_WR_LSB_FIRST: 设置SPI设备的LSB优先模式。
- SPI_IOC_RD_BITS_PER_WORD: 读取SPI设备的字长。
- SPI_IOC_WR_BITS_PER_WORD: 设置SPI设备的字长。
- SPI_IOC_RD_MAX_SPEED_HZ: 读取SPI设备的最大通信速率。
- SPI_IOC_WR_MAX_SPEED_HZ: 设置SPI设备的最大通信速率。
- SPI_IOC_MESSAGE(N): 一次进行N次双向或多次读写操作。
4.2 SPI测试实验 将上述设备树以及驱动修改之后更新板卡的内核,通过SPI设备文件来判断spi驱动是否加载成功 这里测试使用的是spi1这一组spi相关接口,检查spi设备:
-
root@linaro-alip:~# ls /dev/spi* /dev/spidev1.0 root@linaro-alip:~#
测试SPI接口,使用/dev/spidev1.0设备节点,实现短接MOSI和MISO线路以自发自收数据,同时在未短接时报告错误
4.2.1 硬件连接 将SPI1的 MIOS与MOSI引脚(板卡上的7和8)短接即可,如下图所示
<ignore_js_op>

4.2.2 测试程序 用户应用层使用spidev驱动的步骤如下:
- 打开SPI设备文件:用户可以通过打开/dev/spidevX.Y文件来访问SPI设备,其中X是SPI控制器的编号,Y是SPI设备的编号。
- 配置SPI参数:用户可以使用ioctl命令SPI_IOC_WR_MODE、SPI_IOC_WR_BITS_PER_WORD和SPI_IOC_WR_MAX_SPEED_HZ来设置SPI模式、数据位数和时钟速度等参数。
- 发送和接收数据:用户可以使用read和write系统调用来发送和接收SPI数据。写入的数据将被传输到SPI设备,而从设备读取的数据将被存储在用户提供的缓冲区中。
- 关闭SPI设备文件:当不再需要与SPI设备通信时,用户应该关闭SPI设备文件。
-
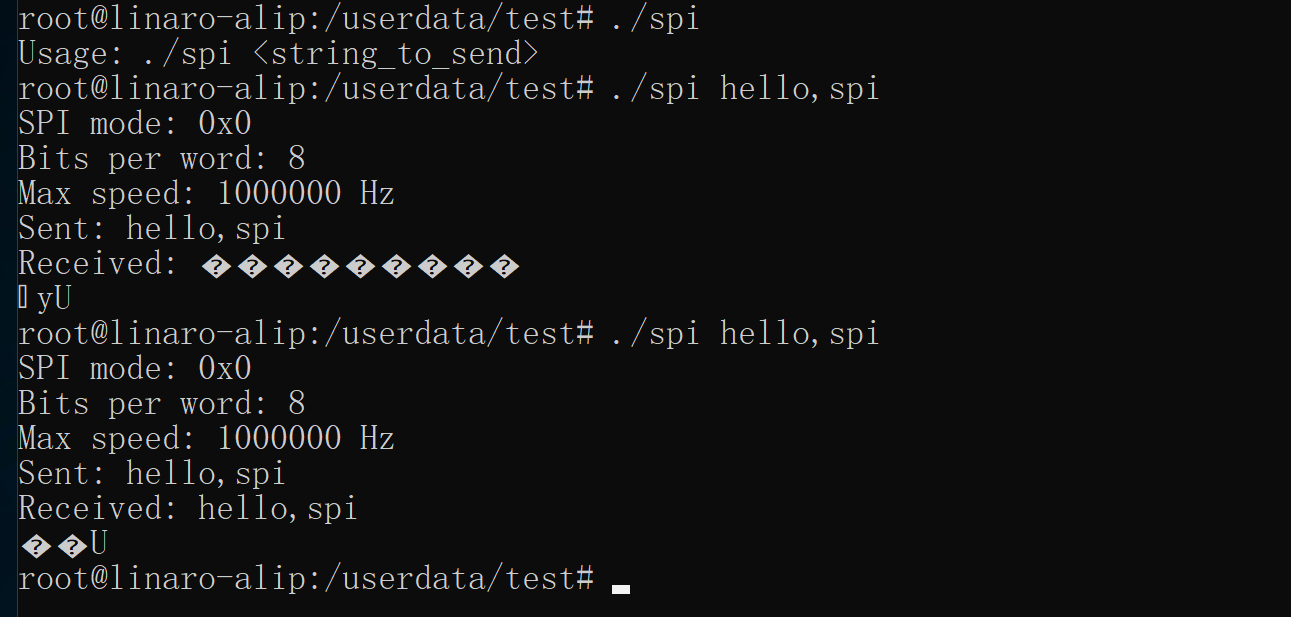
#include #include #include #include #include #include #include #include #define SPI_DEV_PATH "/dev/spidev1.0" int fd; static unsigned mode = SPI_MODE_0; static uint8_t bits = 8; static uint32_t speed = 1000000; // 设置SPI速度为1MHz static uint16_t delay; void transfer(int fd, uint8_t const *tx, uint8_t *rx, size_t len) { int ret; struct spi_ioc_transfer tr = { .tx_buf = (unsigned long)tx, .rx_buf = (unsigned long)rx, .len = len, .delay_usecs = delay, .speed_hz = speed, .bits_per_word = bits, .cs_change = 0, // 设置为1以在每次传输前切换片选,这里不切换片选 }; ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr); if (ret < 1) { perror("SPI transfer failed"); } } void spi_init(void) { int ret; // 打开 SPI 设备 fd = open(SPI_DEV_PATH, O_RDWR); if (fd < 0) { perror("Can't open SPI device"); exit(1); } // 设置 SPI 工作模式 ret = ioctl(fd, SPI_IOC_WR_MODE, &mode); if (ret == -1) { perror("Can't set SPI mode"); exit(1); } // 设置位数 ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits); if (ret == -1) { perror("Can't set bits per word"); exit(1); } // 设置SPI速度 ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed); if (ret == -1) { perror("Can't set max speed"); exit(1); } // 打印设置 printf("SPI mode: 0x%x\n", mode); printf("Bits per word: %d\n", bits); printf("Max speed: %d Hz\n", speed); } int main(int argc, char *argv[]) { if (argc != 2) { printf("Usage: %s \n", argv[0]); return 1; } char *tx_buffer = argv[1]; // 获取要发送的字符串作为命令行参数 // 初始化SPI接口 spi_init(); // 设置要接收数据的缓冲区 unsigned char rx_buffer[strlen(tx_buffer) + 1]; // 执行SPI数据传输 transfer(fd, tx_buffer, rx_buffer, strlen(tx_buffer)); // 打印发送和接收的数据 printf("Sent: %s\n", tx_buffer); printf("Received: %s\n", rx_buffer); // 关闭SPI设备 close(fd); return 0; } 复制代码 4.2.3 编译&运行 开发板上下载gcc编译器: apt upgrade apt update apt install gcc
-
gcc spi_test.c -o spi
短接与不短接的运行情况如下:
<ignore_js_op>
 标签:spi,主机,接口,---,SPI,ArmSoM,IOC,设备
From: https://www.cnblogs.com/armsom/p/17792999.html
标签:spi,主机,接口,---,SPI,ArmSoM,IOC,设备
From: https://www.cnblogs.com/armsom/p/17792999.html